本节为使用51单片机来设计出一辆小车,走出迷宫,那么需要以下几个模块:
1. 51最小系统(底座,电源,晶振,阻容复位,排母)
2. 红外避障模块
3. 电机模块(带tb6612电驱)
4. 电源模块(航模电池+lm7805)
一. 做出一个走迷宫的车,我是用红外传感器的方法实现的,当传感器检测到有东西时,会返回一个低电平,将传感器的out口接最小系统的一个io口让程序检测他的状态,控制电驱。
二. 由于单片机只能输出5v的电压,并且不能控制电机的正反转,所以我们使用到一个tb6612的电驱,该电驱可以控制两个电机,可通过对其引脚赋值来改变两个电机的正反转和转速(占空比)。这样可以使用较少的单片机io口来控制电机,并且实现对电机转速以及正反转的控制。
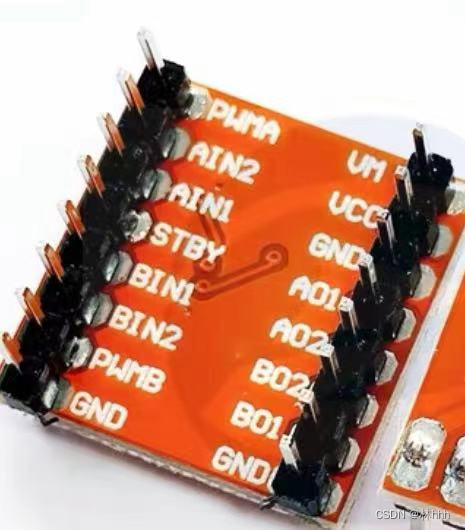
tb6612电驱如上图,VM端可直接接航模电池正极,VCC,GND端接单片机最小系统。A01,A02,B01,B02,接两个直流电机,正反接只会改变电机的方向。STBY相当于该电驱的开关,可以接到一个IO口上,对其赋高电平该电驱工作,赋0所有电机关闭。PWMA,AIN1,AIN2.是控制一个电机的PWMA是向电机1输送pwm波,控制电机的转速,AIN1,AIN2对其输送不同的值,其控制电机的正反转,当输送相同的值时,电机停转。PWMB,BIN1,BIN2是控制另一个电机,方法同电机1.
三. 我们要对自己焊接的51最小系统进行供电,这里是使用航模电池。但由于单片机只能接受5v的电压,所以这里又需要一个lm7805稳压电源模块,可以将接进去的7.4v的航模电池转换成5v电压在输给单片机的最小系统,由于7805有多个输出口,也可以将它直接供给红外或电驱。
四. 要控制小车走出迷宫,我认为应在小车四周都安装红外传感器,当前面和左右两面都有东西时,让小车左右两个轮子以相同的速度正反转,知道前面检测不到东西。小车如果向左转,使左边电机关闭,右边电机工作,即可实现转弯。
五, 小车转弯时,假设右边红外传感器检测到目标,传回低电平,那么控制电驱使右边电机停止工作,左边电机转动,即可实现转弯。
以上就是我对用51单片机实现避障小车走迷宫的设计思路,想法比较幼稚,欢迎指正。
最后
以上就是鲤鱼大山最近收集整理的关于基于51实现红外避障小车设计思路(走迷宫)的全部内容,更多相关基于51实现红外避障小车设计思路(走迷宫)内容请搜索靠谱客的其他文章。








发表评论 取消回复