Perspective Camera Model
Perspective Camera Model 或 Pinhole Camera Model都是简单但是应用广泛的模型,描述了将物体从3D世界坐标系转换(World Coordinate)到2D图像坐标系(Image Coordinate)的数学映射过程。Perspective Camera Model包含了:
3D世界坐标系——>3D相机坐标系(CameraCoordinate)——>2D图像坐标系。
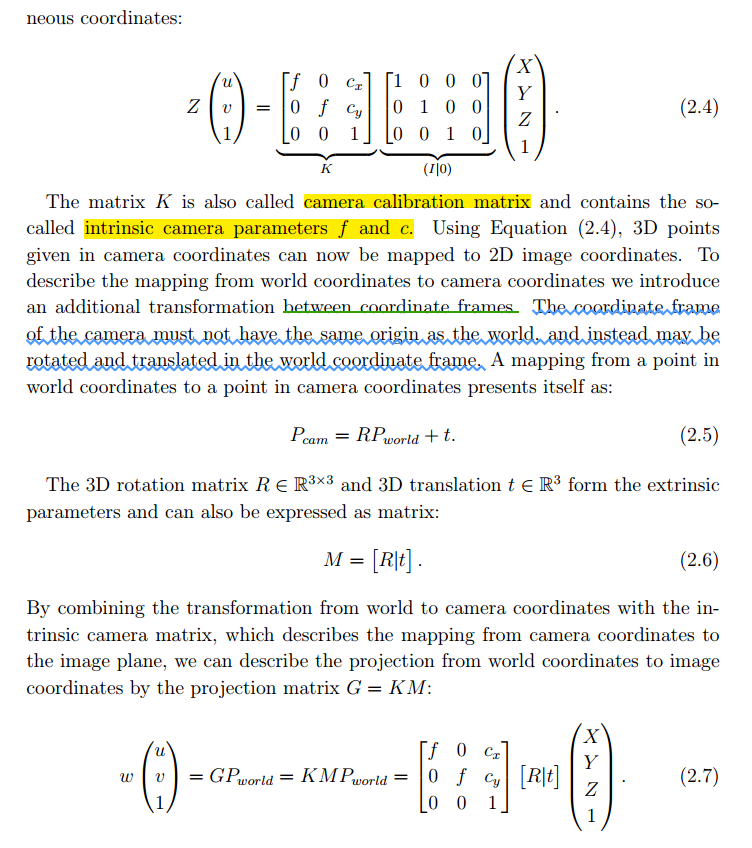
3D世界坐标系——>3D相机坐标系需要知道相机的外参数:相机相对于世界坐标系原点的旋转角度和平移距离。3D相机坐标系——>2D图像坐标系需要知道相机的内参数,比如相机的焦距f,2D图像坐标系的原点位置C等5个内参数。
从3D世界坐标系——>3D相机坐标系,主要是考虑到多个摄像机的情况。假如有多个摄像机从不同的位置拍摄同一个场景,则场景中某个点的世界坐标系是固定的,但是在不同的相机中,即在不同的相机坐标系中的位置是不一样的。因此,在知道摄像机外参数的条件下,通过这一步转换可以将某个特定点的世界坐标系转换到不同的相机坐标系。
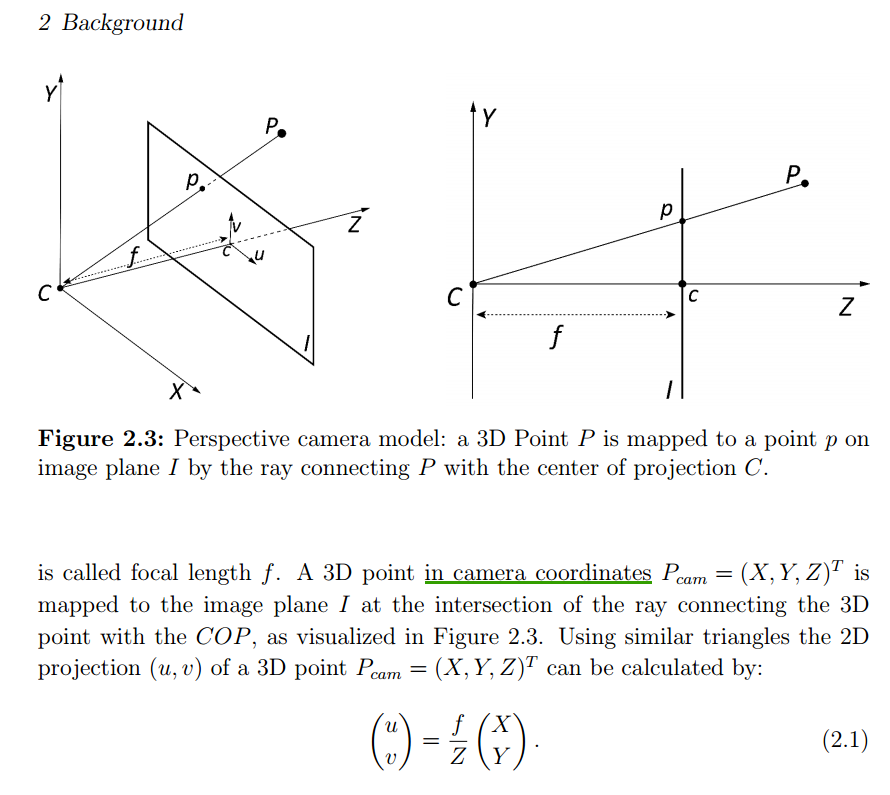
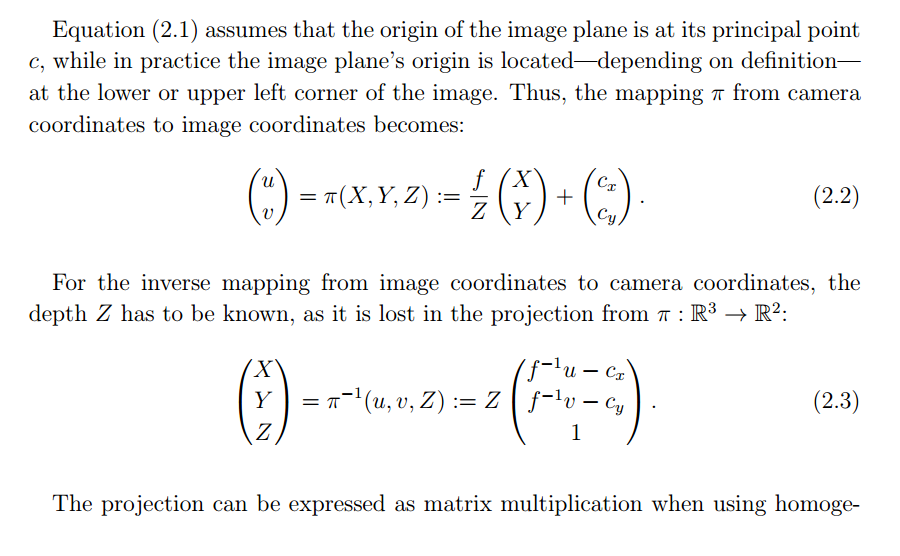
以下是参考资料的原文截图:
参考博客
相机模型详解
最后
以上就是积极河马最近收集整理的关于相机模型(Camera Model)的全部内容,更多相关相机模型(Camera内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复