PanoSim 提供了一套支持高级驾驶辅助系统(ADAS)和自动驾驶系统(AD)的技术开发、测试和验证的仿真模型和虚拟实验环境。其包含的功能模块有:
⚫ PanoExp:实验主界面,用于创建和定义实验。一个实验包括:测试场景、一辆至多辆实验车(加装传感器)、驾驶任务、控制模型和仿真设置参数。
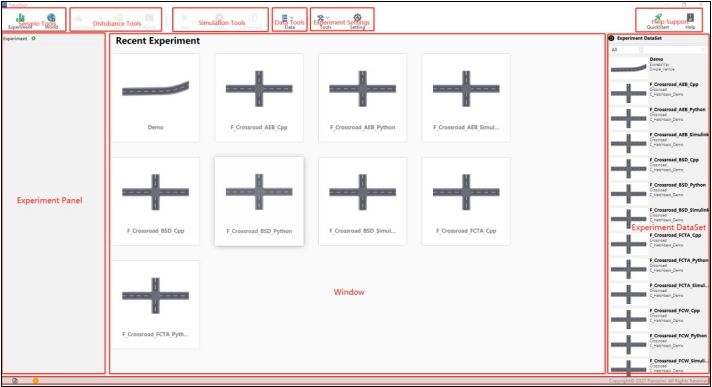
Experiment GUI 主界面
⚫ WorldBuilder:用于搭建车辆行驶的交通场景,如场地和道路、动/静态交通元素、交通信号灯、交通标志等。用户可以搭建出多元化的道路,实现车辆在各种道路场景下行驶的仿真实验。
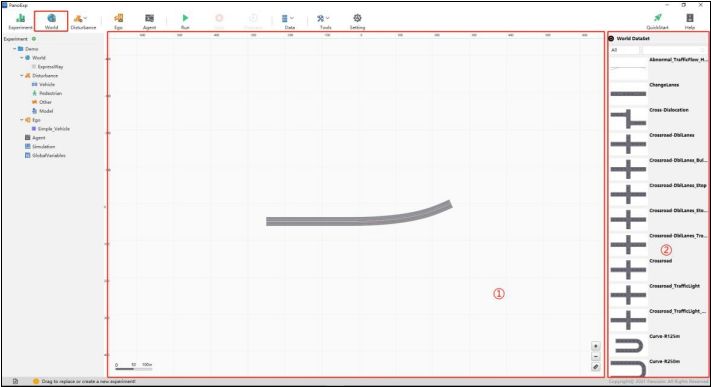
场景道路选择界面
⚫ SensorBuilder:用于向被测车辆添加传感器模型,目前提供毫米波雷达、激光雷达、超声波雷达、单目相机、鱼眼相机、GNSS、IMU 等。用户可以通过添加传感器获得车辆行驶过程中的环境感知信息,以用于各类算法的开发、验证等功能。

支持单目相机、鱼眼相机、深度相机、语义分割相机
⚫ VehicleBuilder:车辆建模工具,用于管理车辆外形及动力学仿真所需车辆物理参数,支持编辑、保存、另存、复制、删除、移动。
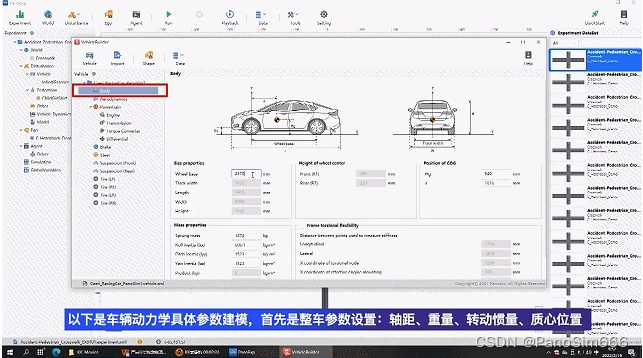
车辆动力学参数编辑
⚫ TestBuilder:用于对实验文件的测试和调试。通过测试,系统可以采集仿真过程中车辆行驶时的不同数据,并对测试结果进行合理评估,便于对算法进行验证和改进。
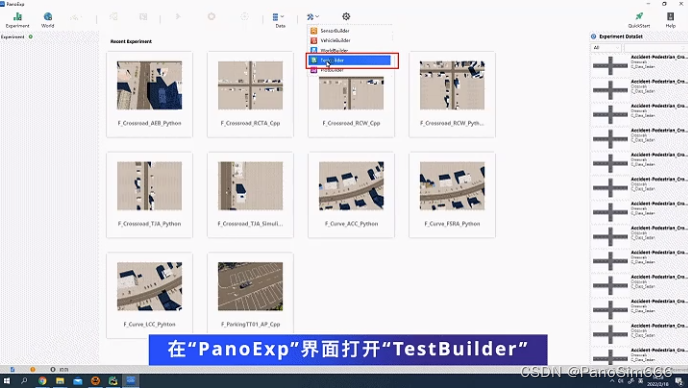
Test实例
⚫ DataManger:数据管理工具,用于实验导入和导出,同时可对现有实验及数据进行分组、移动和删除。
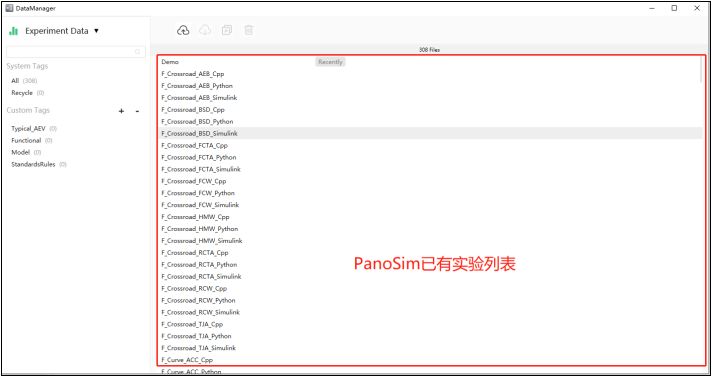
Experiment 数据管理器界面
PanoSim 5.0软件功能界面,就简单介绍到这里啦,想了解更多可点击关注等后续更新,也可私信申请试用哦~
最后
以上就是笨笨樱桃最近收集整理的关于PanoSim 5.0 简介--主要功能的全部内容,更多相关PanoSim内容请搜索靠谱客的其他文章。








发表评论 取消回复