为了方便用户开发,PanoSim提供了两类驾驶员模型:控制型驾驶员模型和智能型驾驶员模型。控制型驾驶员模型包含横向控制和纵向控制模块,可以根据用户指定的速度和路径,实现速度跟随和路径跟踪功能。智能型驾驶员模型包括决策规划和控制模块,具备避让车辆行人、识别交通信号灯等功能,可以根据用户指定的驾驶任务,安全地从起点行驶到终点。智能型驾驶员模型还具备协作开发能力,用户可以将"决策规划"、"横向控制"和"纵向控制"中的任意模块切换为用户的算法,而不会影响其他模块的运行。
本文主要介绍控制型驾驶员模型。控制型驾驶员模型支持Simple、xCar_Raw、xCar_Simulink、xCar_NI、CarSim_Simulink和RealVehicle六种动力学车辆模型。
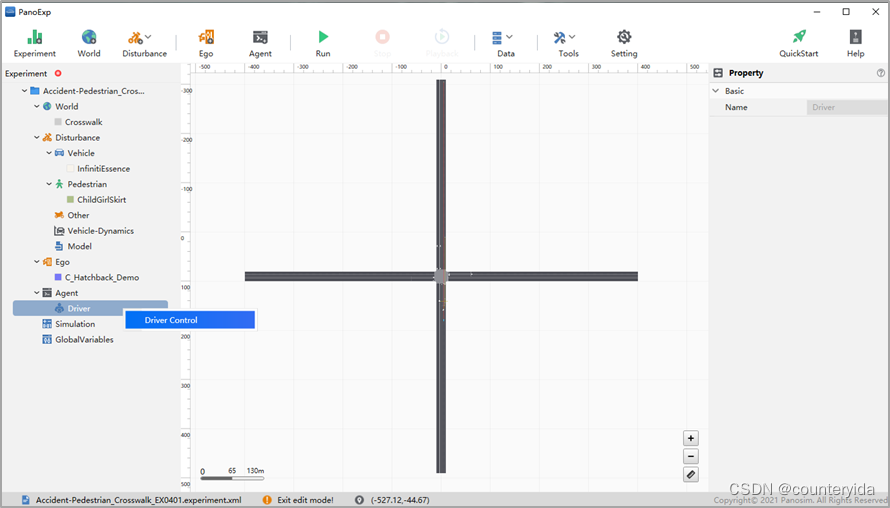
控制型驾驶员模型设置功能入口
在使用控制型驾驶员模型时,按照以下步骤操作:
1、主车拖动到地图中之后,双击主车,定义期望路径;
2、在主车参数栏中,将"InitialSpeed"参数设置为目标速度;
3、如果Agent中包含xDriver,需要将xDriver删除;
4、鼠标右键单击Driver,弹出"Driver Control"菜单,如图5.31所示,左键点击"Driver Control"菜单,弹出驾驶员控制算法对话框。
 控制型驾驶员模型
控制型驾驶员模型
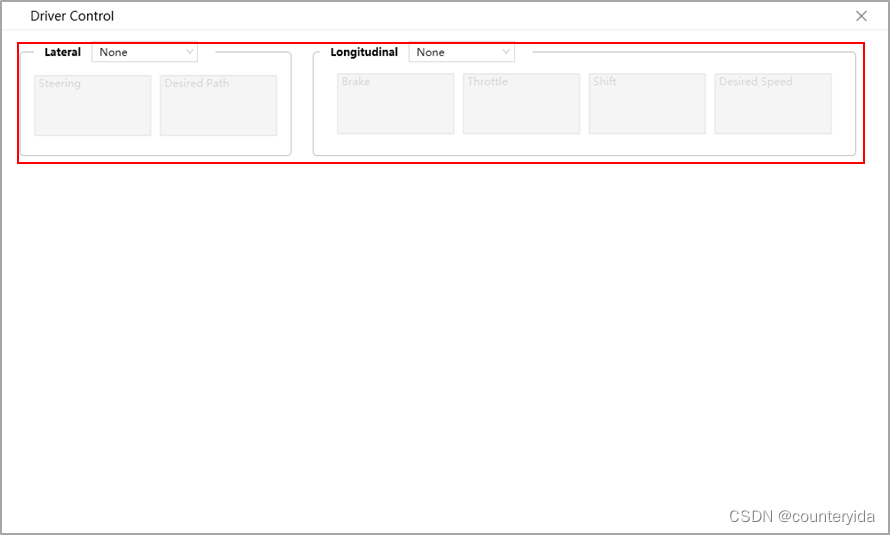
控制型驾驶员算法对话框列出了车辆侧向和纵向的控制使能的选择框,见红色方框区域。红色方框区域左侧“Lateral”对应车辆侧向动力学控制,分为无控制(None)、方向盘开环控制(Open Loop)和路径跟随闭环控制(Closed Loop)三种控制方式,三者为互斥关系,只能选择其中之一,默认为无控制(None)。红色方框区域右侧对应纵向动力学的油门(Throttle),挡位(Shift)和制动压力(Brake)控制,也分为无控制(None)、开环控制(Open Loop)和闭环控制(Closed Loop)三种控制方式,三者为互斥关系,只能选择其中之一,默认为无控制(None)。
使能某控制模块选项后,点击模块的图标,在对话框下方区域的右侧表格中可以编辑控制策略数据,同时在下方左侧显示该控制策略的曲线。运行实验之后,主车将按照用户设定的指令(方向盘转角,油门开度,制动压力,变速器挡位)行驶或者按照规划的路径行驶。
最后
以上就是爱撒娇雪糕最近收集整理的关于PanoSim5.0控制型驾驶员模型功能介绍的全部内容,更多相关PanoSim5内容请搜索靠谱客的其他文章。








发表评论 取消回复