ESO是自抗扰控制器的核心 .ADRC仅需要系统的输入量和输出量作为信息来源, 通过扩张状态
观测器不仅可以得到各个状态变量的估计, 而且能够估计出不确定模型和外扰的实时作用量, 并在反
馈中加以补偿, 从而达到重新构造对象的目的
自抗扰控制入门之ESO篇
- 一:ESO的理论基础(状态观测器)
- 1.0 相关资源和B站视频连接(先看视频后看我的讲解,视频只有8分钟)
- 1.1 状态观测器的工作原理
- 二: ESO的推导
- 三 fal函数的讲解
- 3.1 所参考论文
- 3.2 fal函数的讲解
一:ESO的理论基础(状态观测器)
1.0 相关资源和B站视频连接(先看视频后看我的讲解,视频只有8分钟)
ESO本质上是一种卡尔曼滤波器的变形
理解卡尔曼滤波器_Part2_状态观测器(B站视频)
1.1 状态观测器的工作原理
以火箭举例子。我们要检测火箭发动机的内部温度。但是,由于技术问题,我们只能检测发动机的外部温度,在此情况下我们借助状态观测器(用数学模型 模仿一个火箭发动机)来判定其内部的温度。
下面的截图中上方是真实火箭发动机,下方的mathematical model是对应的数学模型。(截图来自我上面给视频链接)
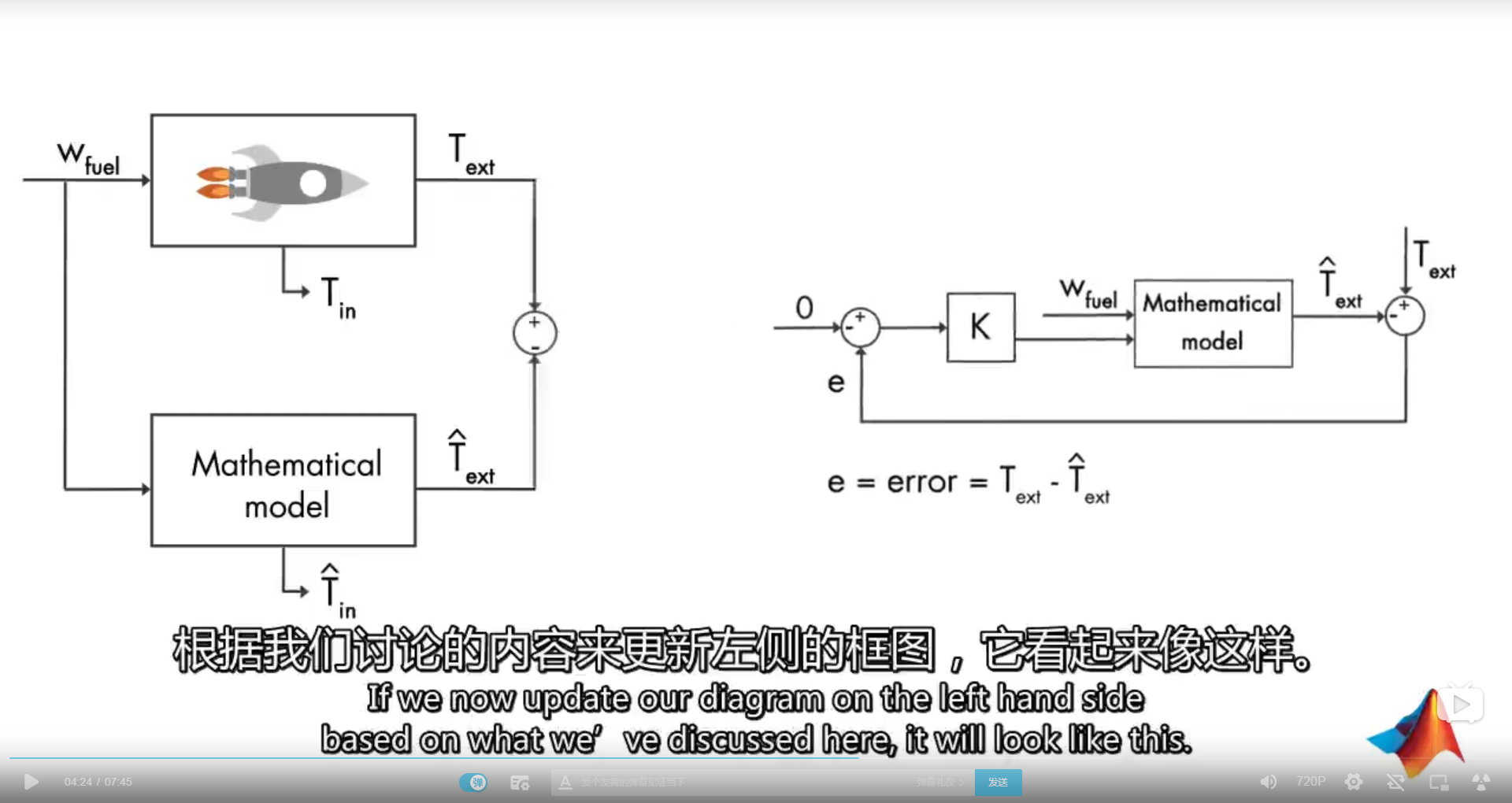
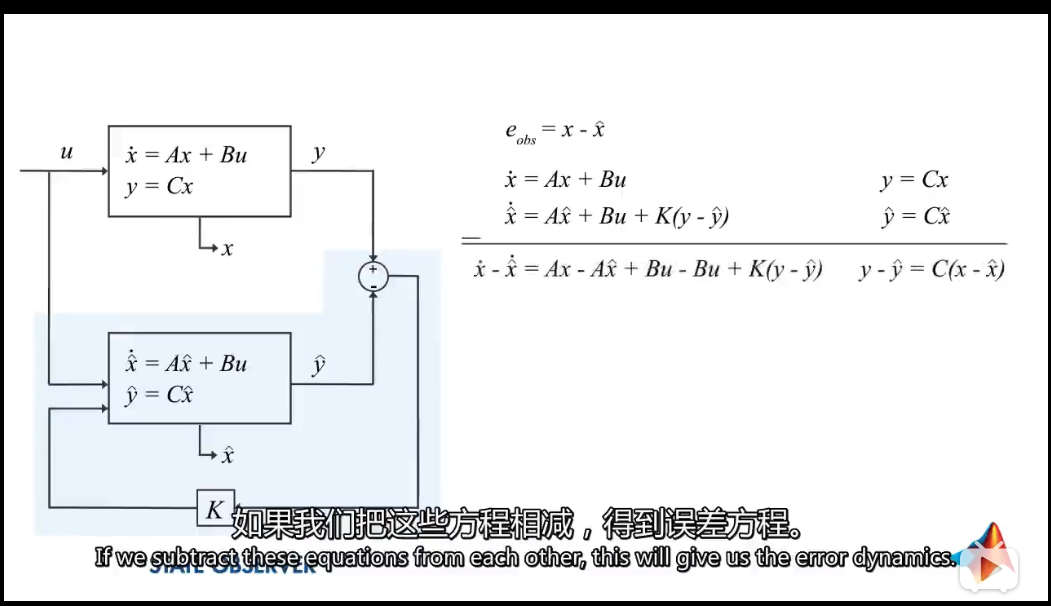
实际系统的输出和观测器的输出相减做误差。此误差不断地进行反馈,最终为0,达到完美的状态观测。
途中带有 ^ 号的为观测器的输出量
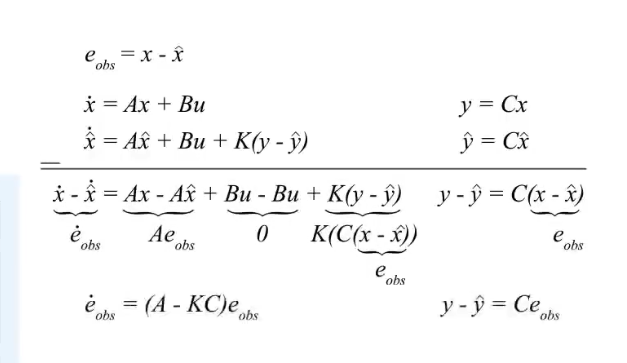
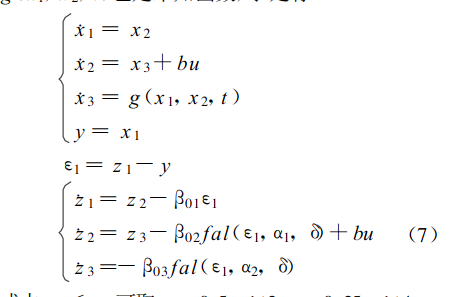
二: ESO的推导
考虑系统
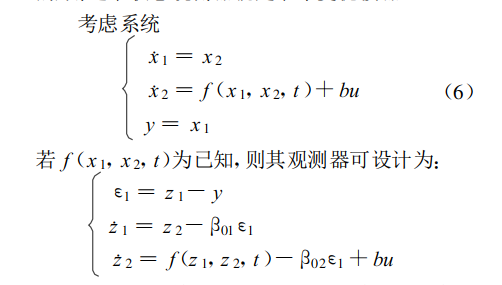
其中的β符号代表的是 反馈误差的反馈系数
令 x3 =f(x1 , x2 , t), ﹒x3 =g(x1 , x2 , t), 则g(x1 , x2 , t)也是未知函数 ,于是有
可取 α1 =0.5 =1/2, α2=0.25 =1/4(一般经验取值) a越小, 跟踪越快, 但滤波效果会变差,a2小于a1使得的得到噪音。
三 fal函数的讲解
Fal函数是 ADRC的核心单元 。Fal函数实际上是对控制工程界的一个经验知识 :“大误差 ,小增益 ;小误差 , 大增益 ”的数学拟合。模糊控制,智能控制 ,变增益 PID等方法, 本质上都是基于这种经验知识, 并且 Fal函数具有快速收敛的特性 , 所以 Fal函数成为后来常用的非线性反馈结构。
3.1 所参考论文
Fal函数滤波器的分析及应用
3.2 fal函数的讲解
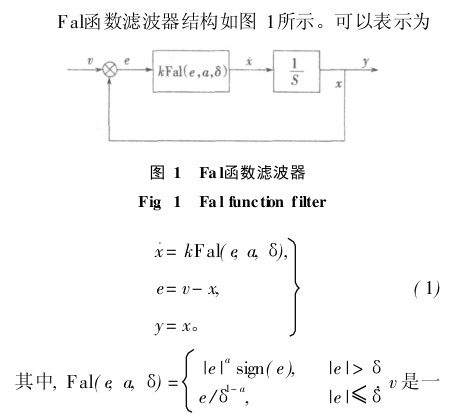
v是一个带有噪声的输入信号, k为比例系数, a为 0 ~ 1之间的常数, δ为影响滤波效果的常数, 输出 y是带有噪声的信号 v通过滤波器后的输出信号 , 可以写为y=FalFilter(v, k, a, δ)。
k是调节响应速度的比例系数 , k越大, 跟踪越快, 但滤波效果会变差 。 a在 0 ~ 1之间取值, a越小, 跟踪越快, 但滤波效果会变差。所以需要在 k、a和 δ之间做一个综合考虑 。
关于a为何在 0 ~ 1之间取值。 α为 0 <α<1时可以。在小误差时应采用大增益 , 大误差时应采用小增益 。
如图 1所示 ,由于 Fal函数滤波器随着 e的变化具有不同的形式, 我们分别予以考虑 。当 e >δ
时 ,非线性反馈 keasign(e)可以使系统状态迅速的逼近输入信号 v,从而使误差 e趋近于 δ。当 e≤
δ时,实际上式(1)的结构为一个低通滤波器。这里kFal(e, a, δ)=ke/δ1 -a,设 k1 =k/δ1 -a,从输入 v到输
出 y写成传递函数的形式为 :
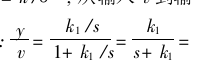

它是一个低通滤波器。当 δ减小时, k1 增加 ,即截止频率增大, 带宽变宽 ,跟踪速度变快 ,但由于有更多的噪声信号通过 ,滤波效果变差 。同理,当δ增加时, k1 减小 ,带宽变窄 ,跟踪速度变慢, 但使得滤波效果变好。上面的分析结果不但说明了 Fal函数滤波器具有快速收敛以及滤波的本质原因 , 还说明了可用 δ来调整跟踪速度和和滤波效果的原因 。
最后
以上就是坚定白羊最近收集整理的关于自抗扰控制入门之ESO篇(纯小白入门向和ESO数学表达式的推导)一:ESO的理论基础(状态观测器)二: ESO的推导三 fal函数的讲解的全部内容,更多相关自抗扰控制入门之ESO篇(纯小白入门向和ESO数学表达式的推导)一:ESO的理论基础(状态观测器)二:内容请搜索靠谱客的其他文章。








发表评论 取消回复