PID controller 是连续时间或离散时间 pid 控制器,即:比例 积分 微分
该模块可以实现 一个 PID 控制器(PID、PI、PD、仅 P 或仅 I)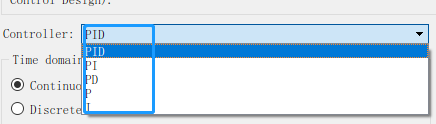
time Domain 可以选择连续时间或者离散时间
控制形式:
ideal 、parallel
该模块的输出是:P 、I 、D 的加权和
更多详细的参数请参考官方文档:连续时间或离散时间 PID 控制器 - Simulink- MathWorks 中国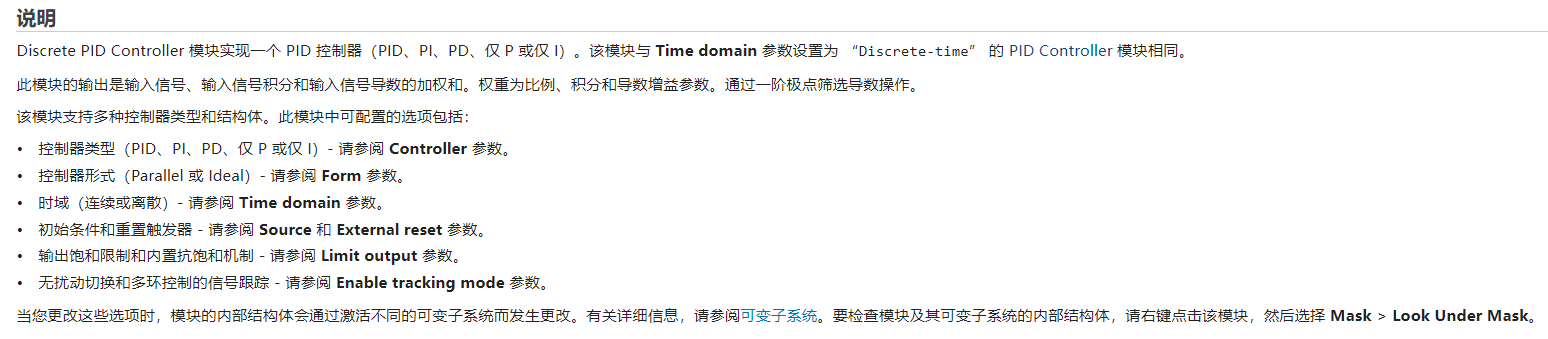
调试PID参数:
PID 的原理比较简单,主要的难度在于调试参数
对于该模块手动可以调试参数如下:
P:比例增益
I:积分增益
D:微分增益
然后该模块自带一个调节参数的GUI界面,可以通过Automated tuning
可选择的方法有基于频率相应和基于传递函数
注意:基于传递函数的时候自己定义的多个模块可能会无法调试
下面以一个简单示例结束这个模块的学习:
在simulink 中搭建如下的一个模型:
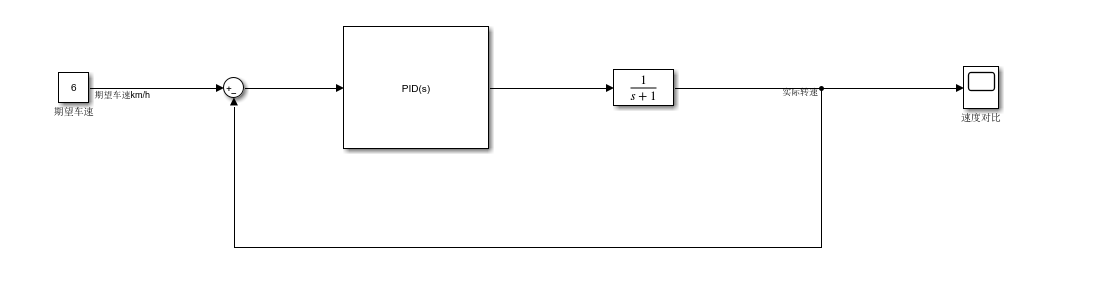
然后使用tune 中的传递函数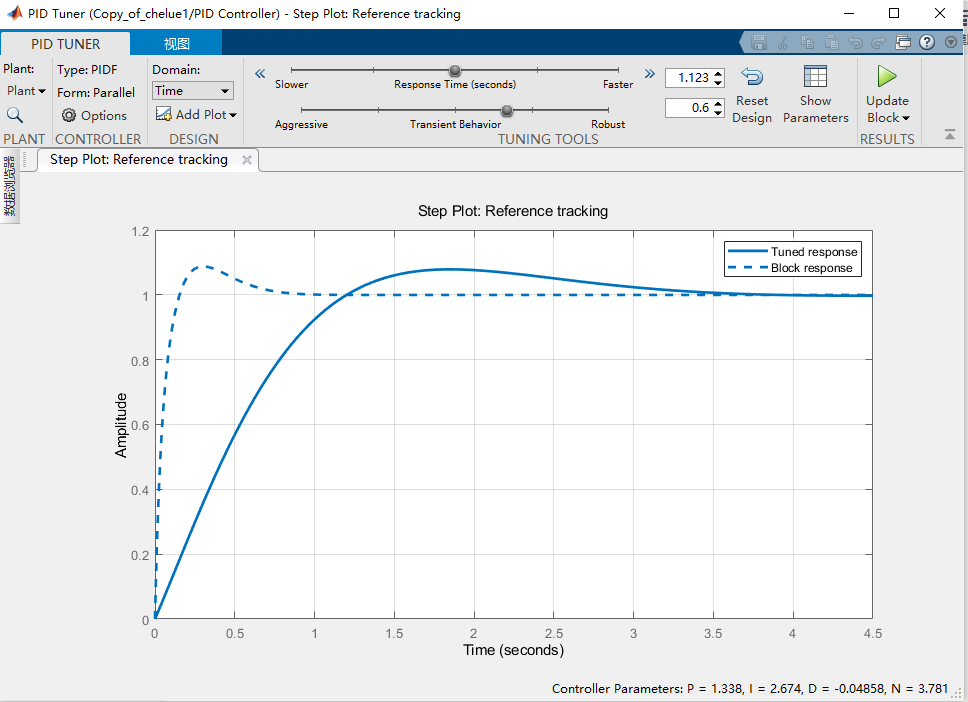
通过滑动上面的滑条找到自己想要的效果然后点击应用即可
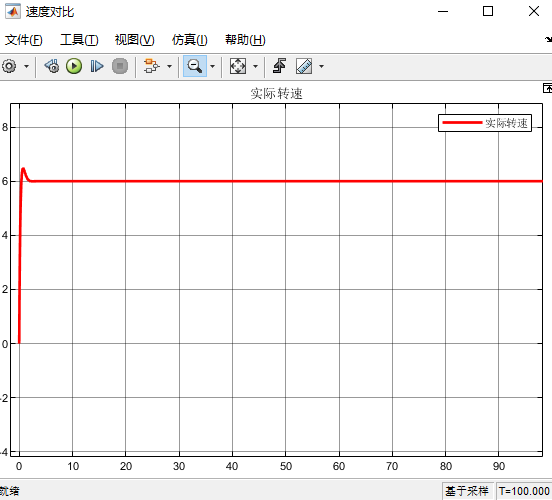
最终跟踪的大致效果如下:
有偿matlab辅导:Vx:1075933062
最后
以上就是无辜月饼最近收集整理的关于Simulink PID Controller 元件学习笔记的全部内容,更多相关Simulink内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。



![[渝粤教育] 兴义民族师范学院 数据结构 参考 资料](https://www.shuijiaxian.com/files_image/reation/bcimg1.png)


![[渝粤教育] 天津师范大学 中学地理教学设计 参考 资料](https://www.shuijiaxian.com/files_image/reation/bcimg4.png)
![[渝粤教育] 四川大学 土木工程概论 参考 资料](https://www.shuijiaxian.com/files_image/reation/bcimg5.png)
发表评论 取消回复