增量式PID介绍
比例P : e(k)-e(k-1) 这次误差-上次误差
积分I : e(i) 误差
微分D : e(k) - 2e(k-1)+e(k-2) 这次误差-2*上次误差+上上次误差
du为增量,error前3偏差计算出来即可算出du;相对于位置式PID要稳定一些
代码:
%增量式PID
clc % 清屏
clear all; % 删除workplace变量
close all; % 关掉显示图形窗口
%%
%建立传递函数
ts=0.001; %采样时间
sys=tf(400,[1,50,0]);%建立传递函数模型,sys = tf(Numerator,Denominator)
dsys=c2d(sys,ts,'z');%连续函数离散化,sysd = c2d(sys,Ts,method)
[num,den]=tfdata(dsys,'v');%获得分子分母,[num,den] = tfdata(sys)
%%
%PID控制量
u_1=0.0;u_2=0.0;u_3=0.0;
y_1=0;y_2=0;y_3=0;
x=[0,0,0]';%’是转置,储存PID的计算值
%%
%误差
error_1=0;
error_2=0;
for k=1:1:1000
time(k)=k*ts;%时间轴,画图用
yd(k)=2.0;%控制目标(理想位置)
%PID参数
kp=8;
ki=0.2;
kd=10;
du(k)=kp*x(1)+kd*x(2)+ki*x(3);%PID控制值增量
u(k)=u_1+du(k);%PID控制器输出的控制量
%避免PID值饱和,限制输出
if u(k)>10
u(k)=10;
end
if u(k)<-10
u(k)=-10;
end
%计算y(k)
y(k)=-den(2)*y_1-den(3)*y_2+num(2)*u_1+num(3)*u_2;%求系统输出
u_3=u_2;u_2=u_1;u_1=u(k);%更新PID输出值,用于下一次y(k)计算
y_3=y_2;y_2=y_1;y_1=y(k);%更新控制结果,用于下一次y(k)计算
%计算偏差,以及PID输入
error=yd(k)-y(k);%偏差=控制目标-当前的值
x(1)=error-error_1;
%计算P
x(2)=(error-error_1)-(error_1-error_2);%计算D
x(3)=error;
%计算I
%更新偏差
error_2=error_1;
error_1=error;
end
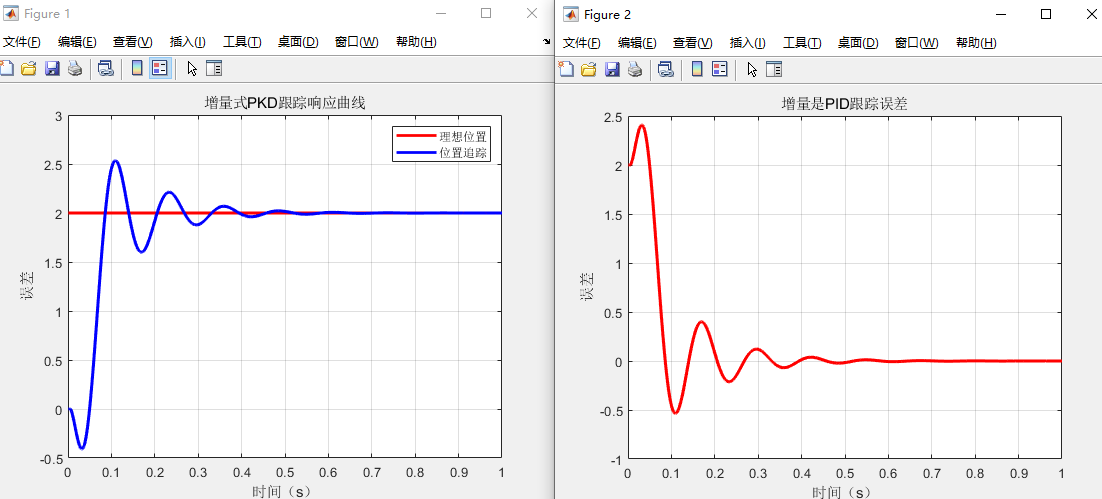
figure(1);
plot(time,yd,'r',time,y,'b','linewidth',2);
xlabel('时间(s)'); ylabel('误差');
grid on
title('增量式PKD跟踪响应曲线');
legend('理想位置','位置追踪');
figure(2);%误差
plot(time,yd-y,'r','linewidth',2);
xlabel('时间(s)');ylabel('误差');
grid on
title('增量是PID跟踪误差');
运行结果
参考材料《MATLAB_SIMULINK系统仿真》
附:
C语言实现增量是PID:
typedef struct PID
{
float P,I,D,limit;
}PID;
typedef struct Error
{
float Current_Error;//当前误差
float Last_Error;//上一次误差
float Previous_Error;//上上次误差
}Error;
/*!
*
@brief
增量式PID
*
@since
v1.0
*
*sptr :误差参数
*
*pid:
PID参数
*
NowPlace:实际值
*
Point:
期望值
*/
// 增量式PID电机控制
int32 PID_Increase(Error *sptr, PID *pid, int32 NowPlace, int32 Point)
{
int32 iError, //当前误差
Increase; //最后得出的实际增量
iError = Point - NowPlace; // 计算当前误差
Increase =
pid->P * (iError - sptr->Last_Error)
//比例P
+ pid->I * iError
//积分I
+ pid->D * (iError - 2 * sptr->Last_Error + sptr->Previous_Error);
//微分D
sptr->Previous_Error = sptr->Last_Error; // 更新前次误差
sptr->Last_Error = iError;
// 更新上次误差
return Increase; // 返回增量
}参考:位置式PID与增量式PID区别浅析_Z小旋-CSDN博客_增量式pid
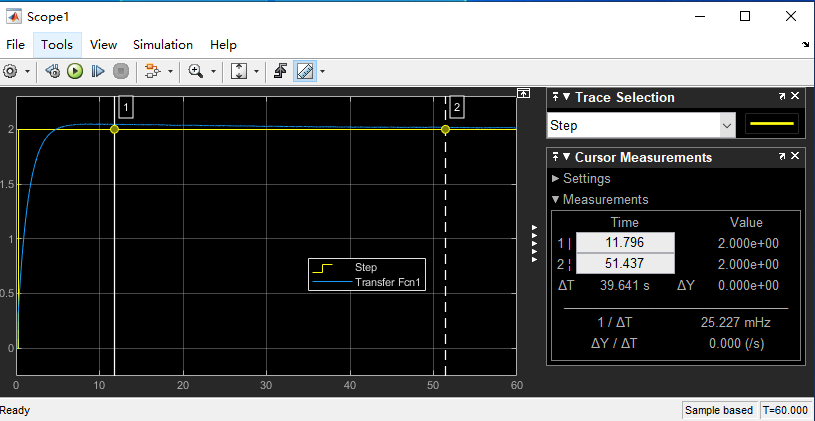
simulink PID仿真:
模型建立:
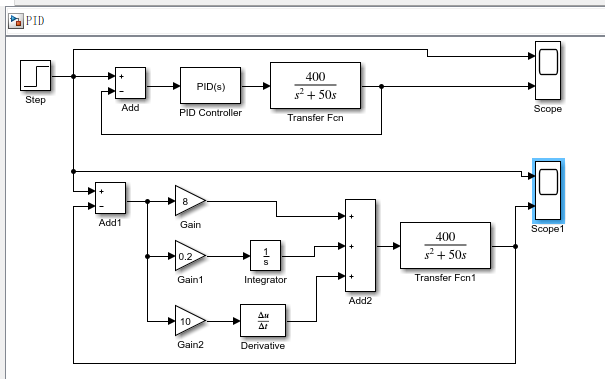
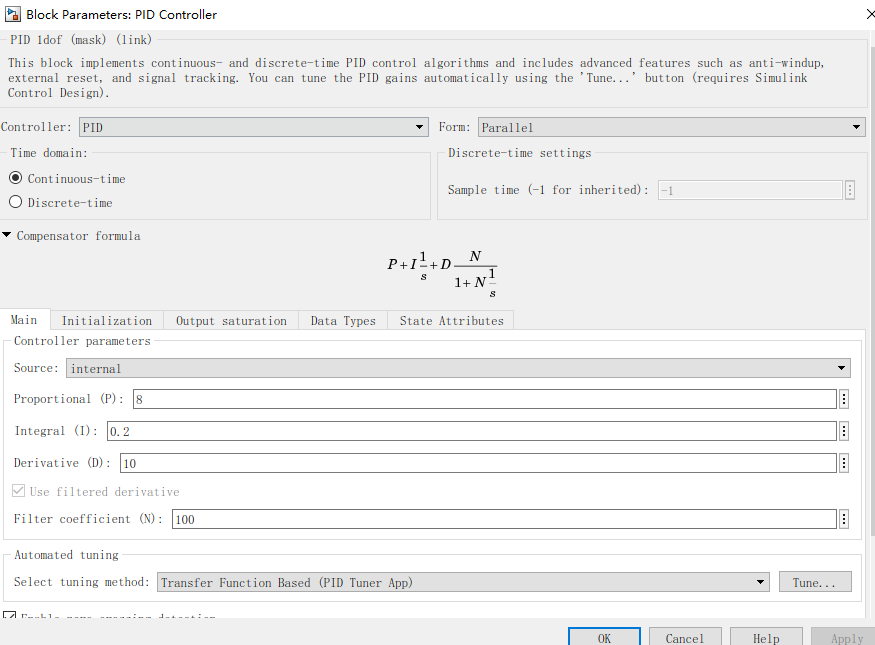
PID参数设置:
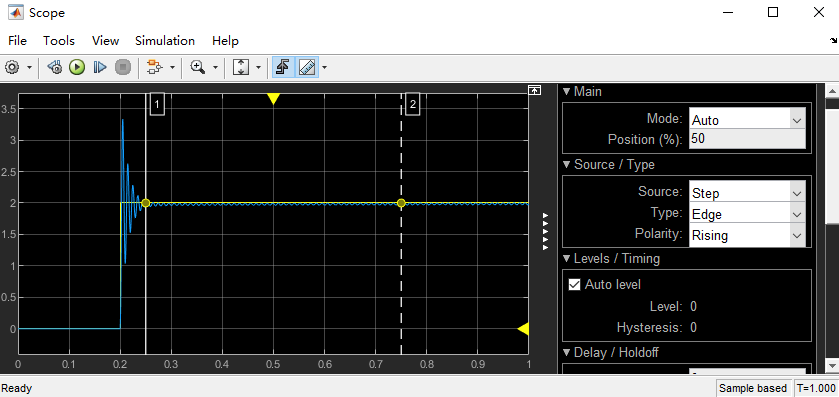
运行结果:
最后
以上就是优秀花生最近收集整理的关于MATLAB-增量式PID的实现&Simulink PID实现增量式PID介绍 运行结果simulink PID仿真:的全部内容,更多相关MATLAB-增量式PID的实现&Simulink内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。





![[渝粤教育] 兴义民族师范学院 数据结构 参考 资料](https://www.shuijiaxian.com/files_image/reation/bcimg1.png)


发表评论 取消回复