????????个人主页:研学社的博客
????????????????欢迎来到本博客❤️❤️????????
????博主优势:????????????博客内容尽量做到思维缜密,逻辑清晰,为了方便读者。
⛳️座右铭:行百里者,半于九十。
????????????本文目录如下:????????????
目录
????1 概述
????2 运行结果
????3 参考文献
????4 Matlab代码实现

????1 概述
低复杂度高精度P级到M级渐进式PMU模型,由Krzysztof Duda和Tomasz P. Zieliński设计。
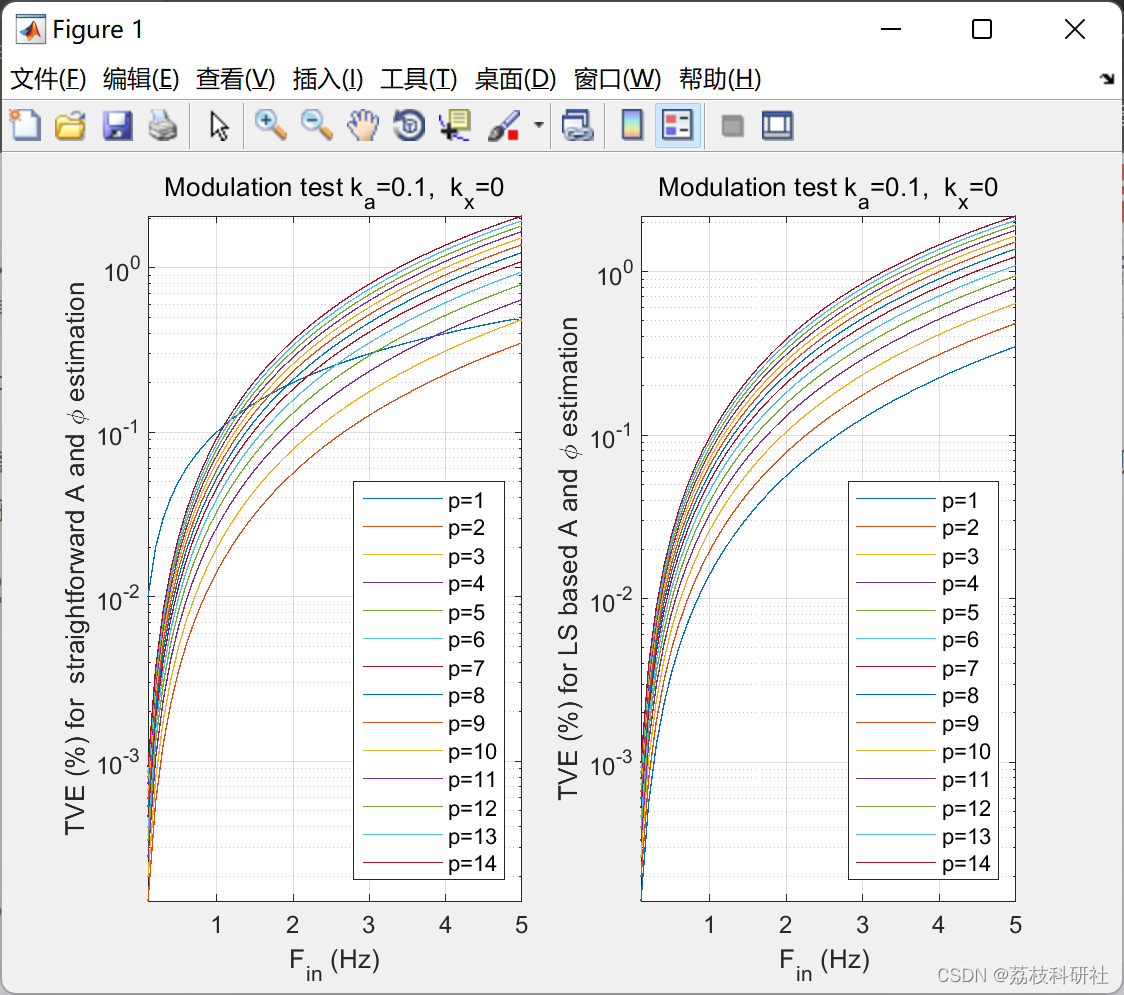
基于离散时间频率增益传感器(DTFGT)和正弦斜率滤波器的P级至M级渐进式PMU模型的实现,以及在IEC/IEEE 60255-118-1标准动态调制测试中的应用。
????2 运行结果
部分代码:
figure,
subplot(1,2,1), hold on
plot(fm, err_TVE_dF)
legend(text_legend_const,'Location','southeast')
xlabel('F_i_n (Hz)'), ylabel('TVE (%) for straightforward A and phi estimation')
title(text_title)
set(gca,'YScale','log'),
axis tight, box on, grid on
subplot(1,2,2), hold on
plot(fm, err_TVE_dF_LS, '-')
legend(text_legend_const,'Location','southeast')
xlabel('F_i_n (Hz) '), ylabel('TVE (%) for LS based A and phi estimation')
title(text_title)
set(gca,'YScale','log'),
axis tight, box on, grid on
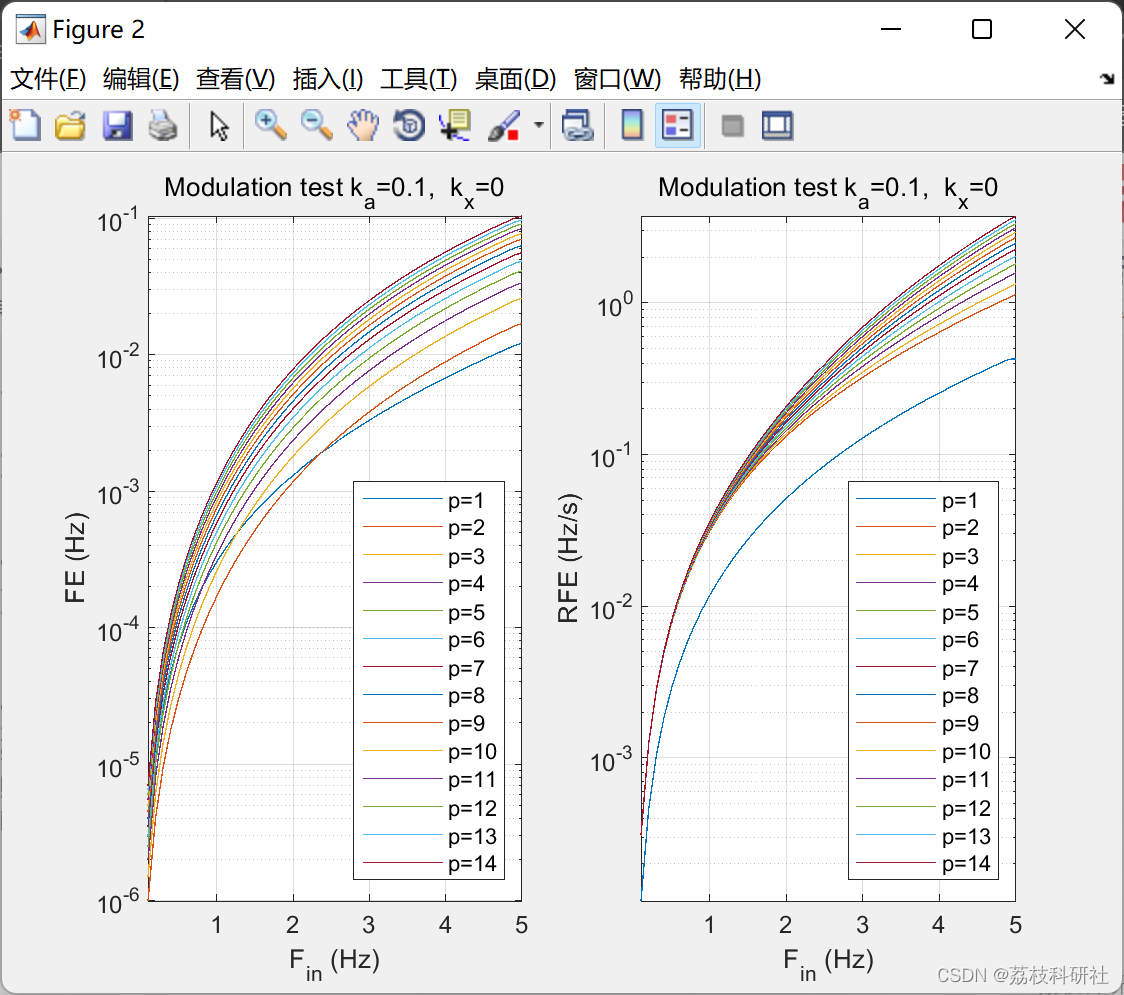
figure,
subplot(1,2,1), hold on
plot(fm, err_Om_dF, '-')
legend(text_legend_const,'Location','southeast')
xlabel('F_i_n (Hz)'), ylabel('FE (Hz)'), title(text_title)
set(gca,'YScale','log'),
axis tight, box on, grid on
subplot(1,2,2), hold on
plot(fm, err_Rocof_dF_LS, '-')
legend(text_legend_const,'Location','southeast')
xlabel('F_i_n (Hz)'), ylabel('RFE (Hz/s)'), title(text_title)
set(gca,'YScale','log'),
axis tight, box on, grid on
end
%###########################################################
function [Phasor, PhasorLS, Omr, ROCOFr] = PMU(x, P, N0, F0)
% PMU implementation with a cascade of rectangular filters
% and the Discrete-Time Frequency-Gain Transducer (DTFGT)
% with the sine-shape slope filter
% x - sinusoidal signal x=A*cos(Om*n+p)
% P - number of rectangular filters in the prefilter cascade
% Phasor - estimated complex phasor reported at nominal frequency with straightforward amplitude and phase estimation
% PhasorLS - estimated complex phasor reported at nominal frequency with LS based amplitude and phase estimation
% Omr - estimated frequency in radians reported at nominal frequency
% ROCOFr - estimated ROCOF in radians per second reported at nominal frequency
Nx = length(x);
Fs = N0*F0; %Hz
t = (0:Nx-1)/Fs;
y = x.*exp(-1i*2*pi*F0*t); % down-shifted sinusoidal signal x=A*cos(Om*n+p), Om=2*pi*f0/fs
%% for LS solution
ND2 = N0/2-1; % only one nominal period, although it could be more for longer cascade
ND1 = -N0/2;
%% sin frequency slope h = [1/2 0 -1/2];
w0= pi/(N0/2);
L = N0/4;
h = [1/2 zeros(1,L-1) 0 zeros(1,L-1) -1/2];
%%
tr = 1:N0:Nx; % reporting times
Phasor = zeros(length(tr), P);
PhasorLS = zeros(length(tr), P);
Omr = zeros(length(tr), P);
ROCOFr = zeros(length(tr), P);
r0 = ones(1,N0)/N0; rp = 1;
for ind=1:P
????3 参考文献
部分理论来源于网络,如有侵权请联系删除。
[1]Krzysztof Duda (2023). P2M_PMU
????4 Matlab代码实现
最后
以上就是雪白战斗机最近收集整理的关于基于离散时间频率增益传感器的P级至M级PMU模型的实现(Matlab代码实现)的全部内容,更多相关基于离散时间频率增益传感器内容请搜索靠谱客的其他文章。








发表评论 取消回复