文章目录
- 写在前面
- 正文
- 左移位寄存器
- 右移位寄存器
- 串行输入并行输出移位寄存器
- 并行输入串行输出移位寄存器
- 参考资料
- 交个朋友
写在前面
- 个人微信公众号:FPGA LAB
- 个人博客首页
- 注:学习交流使用!
正文
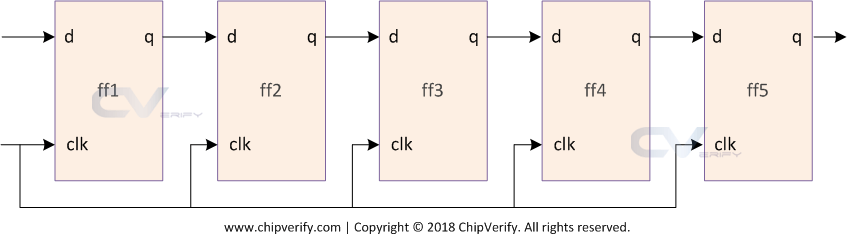
在数字电子产品中,移位寄存器是级联的触发器,其中一个触发器的输出引脚q连接到下一个触发器的数据输入引脚(d)。 因为所有触发器都在同一时钟上工作,所以存储在移位寄存器中的位阵列将移位一个位置。
例如,如果一个5位右移寄存器的初始值为10110,并且将移位寄存器的输入绑定到O,则下一个模式将为01011,下一个模式将为00101。
移位寄存器的种类有很多,需要根据需求来设计,但万变不离其宗,都是每一个时钟,寄存器阵列移位一次,下面就盘点各种移位寄存器:
- 左移位寄存器
- 右移位寄存器
- 串行输入并行输出移位寄存器
- 并行输入串行输出移位寄存器
下面就分别认识下吧。
左移位寄存器
所谓的左移,这里约定成网高位移位,这是因为我们通常定义变量都是:
reg [MSB:LSB] VAR;
高位在左,底位在右,因此左移便是向高位移位。
其实这里还可以继续细分,是循环左移还是非循环的呢?
循环左移寄存器
所谓的循环左移,就是将最高位移位到最低位,次高位作为最高位,依次循环。
电路设计:
以四位循环左移为例,给出电路设计Verilog代码:
`timescale 1ns / 1ps
//
// Engineer: Reborn Lee
// Module Name: cycle_left_register
// Additional Comments:
// https://blog.csdn.net/reborn_lee
//
module cycle_left_register #(parameter MSB = 4)(
input [MSB - 1 : 0] din,
input i_rst,
input i_load,
input i_clk,
output [MSB - 1 : 0] dout
);
reg [MSB - 1 : 0] dout_mid;
always@(posedge i_clk) begin
if(i_rst) begin
dout_mid <= 'd0;
end
else if(i_load) begin
dout_mid <= din;
end
else begin
dout_mid <= {dout_mid[MSB - 2 : 0], dout_mid[MSB - 1]};
end
end
assign dout = dout_mid;
endmodule
注:里面添加了一个信号,叫装载信号i_load,这个信号有效的时候,将输入din赋值给中间寄存器dout_mid,这样才能实现每一个时钟上升沿来临时,都对输入左移一次。
测试代码
简单给出测试代码:
`timescale 1ns / 1ps
//
// Engineer: Reborn Lee
// Module Name: cycle_left_register_tb
// https://blog.csdn.net/reborn_lee
//
module cycle_left_register_tb(
);
parameter MSB = 4;
reg [MSB - 1 : 0] din;
reg i_rst;
reg i_clk;
reg i_load;
wire [MSB - 1 : 0] dout;
//generate clock
initial begin
i_clk = 0;
forever begin
#5 i_clk = ~i_clk;
end
end
//generate rst and input data
initial begin
i_rst = 1;
din = 0;
i_load = 0;
# 22
i_rst = 0;
@(negedge i_clk) begin
din = 'b1011;
i_load = 1;
end
@(negedge i_clk) begin
i_load = 0;
end
repeat(5) @(posedge i_clk);
@(negedge i_clk) begin
din = 'd0101;
i_load = 1;
end
@(negedge i_clk) i_load = 0;
repeat(4) @(posedge i_clk);
#10 $finish;
end
initial
$monitor (" i_rst = %0b, i_load = %0b, din = %b, dout = %b", i_rst, i_load, din, dout);
cycle_left_register #(.MSB(MSB))inst_cycle_left_register(
.i_clk(i_clk),
.i_rst(i_rst),
.i_load(i_load),
.din(din),
.dout(dout)
);
endmodule
给出仿真结果:
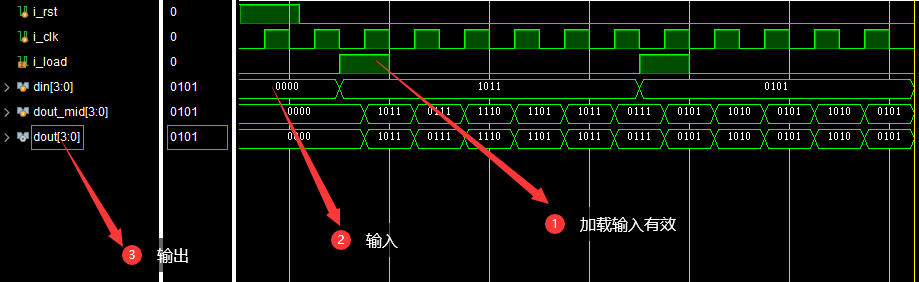
监控记录:
i_rst = 1, i_load = 0, din = 0000, dout = xxxx
i_rst = 1, i_load = 0, din = 0000, dout = 0000
i_rst = 0, i_load = 0, din = 0000, dout = 0000
i_rst = 0, i_load = 1, din = 1011, dout = 0000
i_rst = 0, i_load = 1, din = 1011, dout = 1011
i_rst = 0, i_load = 0, din = 1011, dout = 1011
i_rst = 0, i_load = 0, din = 1011, dout = 0111
i_rst = 0, i_load = 0, din = 1011, dout = 1110
i_rst = 0, i_load = 0, din = 1011, dout = 1101
i_rst = 0, i_load = 0, din = 1011, dout = 1011
i_rst = 0, i_load = 0, din = 1011, dout = 0111
i_rst = 0, i_load = 1, din = 0101, dout = 0111
i_rst = 0, i_load = 1, din = 0101, dout = 0101
i_rst = 0, i_load = 0, din = 0101, dout = 0101
i_rst = 0, i_load = 0, din = 0101, dout = 1010
i_rst = 0, i_load = 0, din = 0101, dout = 0101
i_rst = 0, i_load = 0, din = 0101, dout = 1010
i_rst = 0, i_load = 0, din = 0101, dout = 0101
非循环左移寄存器
非循环左移对于循环左移来说,就是最高位不移入最低位,而是丢弃,最低位补零。
修改其中移位语句即可:
dout_mid <= {dout_mid[MSB - 2 : 0], dout_mid[MSB - 1]};
改为:
dout_mid <= {dout_mid[MSB - 2 : 0],1'b0};
行为仿真波形

i_rst = 1, i_load = 0, din = 0000, dout = xxxx
i_rst = 1, i_load = 0, din = 0000, dout = 0000
i_rst = 0, i_load = 0, din = 0000, dout = 0000
i_rst = 0, i_load = 1, din = 1011, dout = 0000
i_rst = 0, i_load = 1, din = 1011, dout = 1011
i_rst = 0, i_load = 0, din = 1011, dout = 1011
i_rst = 0, i_load = 0, din = 1011, dout = 0110
i_rst = 0, i_load = 0, din = 1011, dout = 1100
i_rst = 0, i_load = 0, din = 1011, dout = 1000
i_rst = 0, i_load = 0, din = 1011, dout = 0000
i_rst = 0, i_load = 1, din = 0101, dout = 0000
i_rst = 0, i_load = 1, din = 0101, dout = 0101
i_rst = 0, i_load = 0, din = 0101, dout = 0101
i_rst = 0, i_load = 0, din = 0101, dout = 1010
i_rst = 0, i_load = 0, din = 0101, dout = 0100
i_rst = 0, i_load = 0, din = 0101, dout = 1000
i_rst = 0, i_load = 0, din = 0101, dout = 0000
注意事项:
循环移位语句:
dout_mid <= {dout_mid[MSB - 2 : 0],1'b0};
其中的最低位一定要写成1’b0,如果写成了0,即:
dout_mid <= {dout_mid[MSB - 2 : 0],0};
则仿真结果变为:
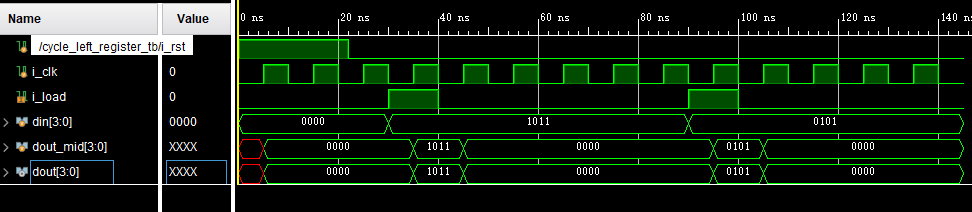
这意味着,直接赋值0给dout_mid了。
右移位寄存器
右移位寄存器和左移位寄存器是对称的,就是每一个时钟上升沿到来,都向低位移动一次,这里也必要重新写了,我们只需要改其中某条移位语句即可。
这里又分为循环与不循环,分别点出。
循环右移位
即:
dout_mid <= {dout_mid[MSB - 2 : 0], dout_mid[MSB - 1]};
改为:
dout_mid <= {dout_mid[0], dout_mid[MSB - 1 : 1]};
为了照顾新手,还是给出完整设计代码:
`timescale 1ns / 1ps
//
// Engineer: Reborn Lee
// Module Name: cycle_left_register
// Additional Comments:
// https://blog.csdn.net/reborn_lee
//
module shift_register #(parameter MSB = 4)(
input [MSB - 1 : 0] din,
input i_rst,
input i_load,
input i_clk,
output [MSB - 1 : 0] dout
);
reg [MSB - 1 : 0] dout_mid;
always@(posedge i_clk) begin
if(i_rst) begin
dout_mid <= 'd0;
end
else if(i_load) begin
dout_mid <= din;
end
else begin
// dout_mid <= {dout_mid[MSB - 2 : 0], 1'b0}; // normal left shift
// dout_mid <= {dout_mid[MSB - 2 : 0], dout_mid[MSB - 1]}; //cycle left shift
dout_mid <= {dout_mid[0],dout_mid[MSB - 1 : 1]};
end
end
assign dout = dout_mid;
endmodule
仿真波形:
由于仿真文件和上述的循环左移一致,就改一下例化即可,这里就没必要给出了 ,直接给出仿真波形:

监控记录
i_rst = 1, i_load = 0, din = 0000, dout = xxxx
i_rst = 1, i_load = 0, din = 0000, dout = 0000
i_rst = 0, i_load = 0, din = 0000, dout = 0000
i_rst = 0, i_load = 1, din = 1011, dout = 0000
i_rst = 0, i_load = 1, din = 1011, dout = 1011
i_rst = 0, i_load = 0, din = 1011, dout = 1011
i_rst = 0, i_load = 0, din = 1011, dout = 1101
i_rst = 0, i_load = 0, din = 1011, dout = 1110
i_rst = 0, i_load = 0, din = 1011, dout = 0111
i_rst = 0, i_load = 0, din = 1011, dout = 1011
i_rst = 0, i_load = 0, din = 1011, dout = 1101
i_rst = 0, i_load = 1, din = 0101, dout = 1101
i_rst = 0, i_load = 1, din = 0101, dout = 0101
i_rst = 0, i_load = 0, din = 0101, dout = 0101
i_rst = 0, i_load = 0, din = 0101, dout = 1010
i_rst = 0, i_load = 0, din = 0101, dout = 0101
i_rst = 0, i_load = 0, din = 0101, dout = 1010
i_rst = 0, i_load = 0, din = 0101, dout = 0101
非循环右移寄存器
相对于循环右移寄存器来说,只需要改动为:最高位补零即可。
即:
将移位语句:
dout_mid <= {dout_mid[0],dout_mid[MSB - 1 : 1]};
改为:
dout_mid <= {1'b0,dout_mid[MSB - 1 : 1]};
仿真波形为:

监控记录
i_rst = 1, i_load = 0, din = 0000, dout = xxxx
i_rst = 1, i_load = 0, din = 0000, dout = 0000
i_rst = 0, i_load = 0, din = 0000, dout = 0000
i_rst = 0, i_load = 1, din = 1011, dout = 0000
i_rst = 0, i_load = 1, din = 1011, dout = 1011
i_rst = 0, i_load = 0, din = 1011, dout = 1011
i_rst = 0, i_load = 0, din = 1011, dout = 0101
i_rst = 0, i_load = 0, din = 1011, dout = 0010
i_rst = 0, i_load = 0, din = 1011, dout = 0001
i_rst = 0, i_load = 0, din = 1011, dout = 0000
i_rst = 0, i_load = 1, din = 0101, dout = 0000
i_rst = 0, i_load = 1, din = 0101, dout = 0101
i_rst = 0, i_load = 0, din = 0101, dout = 0101
i_rst = 0, i_load = 0, din = 0101, dout = 0010
i_rst = 0, i_load = 0, din = 0101, dout = 0001
i_rst = 0, i_load = 0, din = 0101, dout = 0000
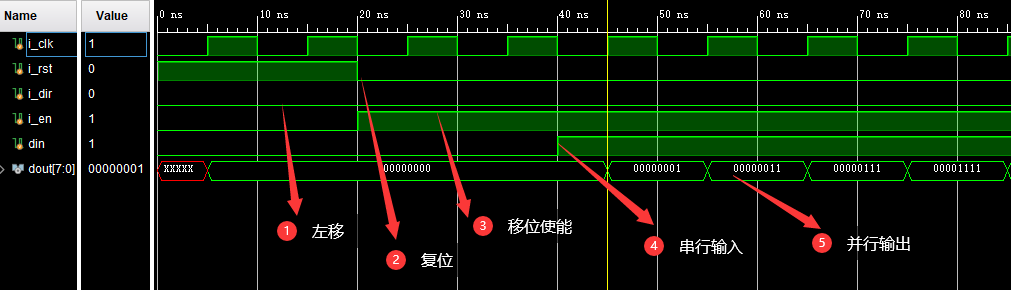
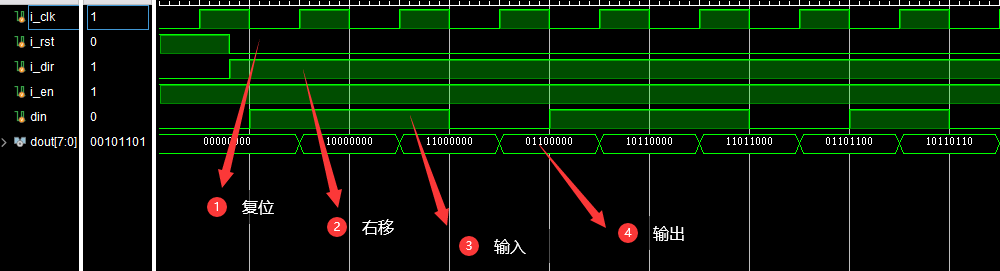
串行输入并行输出移位寄存器
该移位寄存器设计具有五个输入和一个n位输出,并且使用参数MSB对设计进行参数化以表示移位寄存器的宽度。 如果MSB为4,则它成为4位移位寄存器。 如果MSB为8,则它成为8位移位寄存器。
该移位寄存器具有一些关键功能。
- 可通过驱动设计的en信号来启用或禁用
- 驱动dir时可左右移动
- 如果将rstn拉为低电平,则会重置移位寄存器,输出将变为0
- 移位寄存器的输入数据值可以通过d引脚控制
因此,这里没有必要再将左移位以及右移位分开来写了,合在一个设计里,通过一个信号dir控制,dir为0,左移,否则,右移!
设计代码
`timescale 1ns / 1ps
//
// Engineer: Reborn Lee
// Module Name: shift_register
// https://blog.csdn.net/reborn_lee
//
module shift_register#(parameter MSB = 8)(
input i_clk,
input i_rst,
input i_dir,
input i_en,
input din,
output reg [MSB - 1 : 0] dout
);
always @(posedge i_clk) begin
if (i_rst) begin
// reset
dout <= 'd0;
end
else if (i_en) begin
case(i_dir)
0: begin //left shift
dout <= {dout[MSB - 2: 0], din};
end
1: begin
dout <= {din, dout[MSB - 1 : 1]};
end
endcase
end
else begin
dout <= dout;
end
end
endmodule
仿真代码
`timescale 1ns/1ps
module shift_register_tb;
parameter MSB = 8;
reg i_clk;
reg i_rst;
reg i_dir;
reg i_en;
reg din;
wire [MSB - 1 : 0] dout;
initial begin
i_clk = 0;
forever begin
# 5 i_clk = ~i_clk;
end
end
initial begin
i_rst = 1;
i_en = 0;
i_dir = 0;
din = 0;
# 18
@(negedge i_clk) begin
i_rst = 0;
i_en = 1;
end
repeat(8) begin
@(negedge i_clk) begin
din = $random;
end
end
@(negedge i_clk) begin
i_rst = 1;
end
#18
i_rst = 0;
i_dir = 1;
repeat(8) begin
@(negedge i_clk) begin
din = $random;
end
end
# 20 $finish;
end
shift_register #(.MSB(MSB))inst_shift_register (
.i_clk(i_clk),
.i_rst(i_rst),
.i_dir(i_dir),
.i_en(i_en),
.din(din),
.dout(dout)
);
endmodule
仿真波形
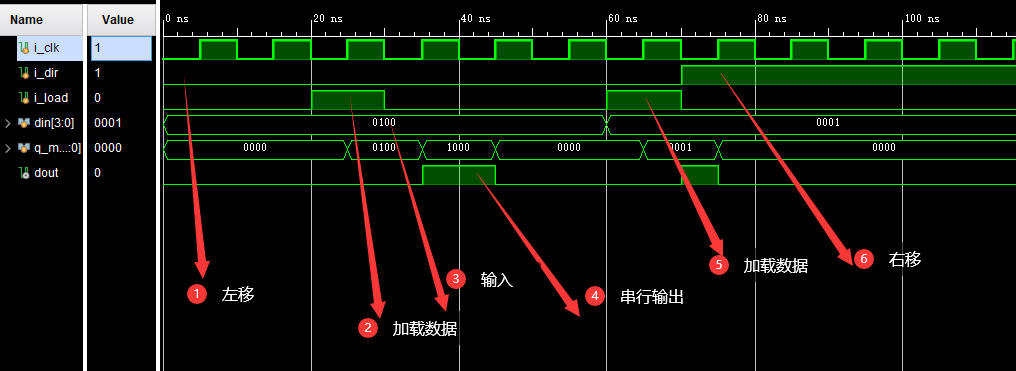
并行输入串行输出移位寄存器
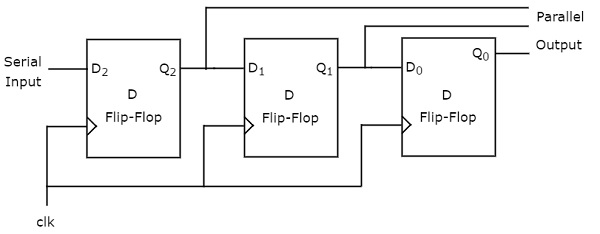
并行输入串行输出的原理图如下:
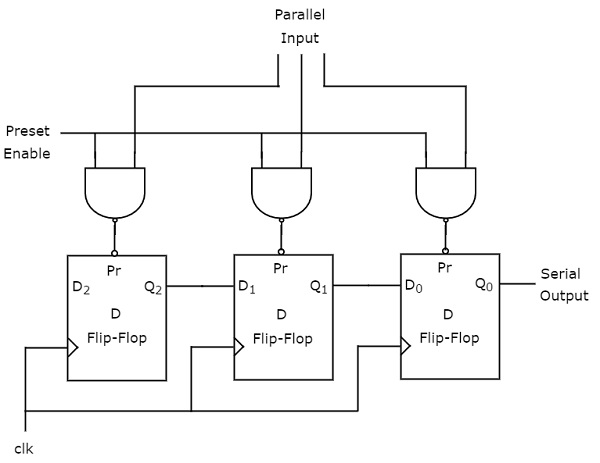
该电路由三个串联的D触发器组成。 这意味着,一个D触发器的输出被连接为下一个D触发器的输入。 所有这些触发器彼此同步,因为相同的时钟信号被施加到每个触发器。
在该移位寄存器中,我们可以通过将Preset Enable(预置使能)设为1,将并行输入应用于每个D触发器。对于时钟信号的每个正沿触发,数据都会从一个级转移到下一个级。 因此,我们将从最右边的D触发器获取串行输出。
于此同时,我们仍然设置一个控制方向的使能信号i_dir,如果i_dir为0,则并行输出左移,取最高位作为串行输出;否则,右移,取最低位作为串行输出。
电路设计
//paralell input and serial output shift register
module shift_register#(parameter MSB = 4)(
input i_clk,
input i_load,
input i_dir,
input [MSB - 1 : 0] din,
output dout
);
reg [MSB - 1 : 0] q_mid = 0;
always@(posedge i_clk) begin
if(i_load) begin
q_mid <= din;
end
else begin
case(i_dir)
1'b0: begin
q_mid <= {q_mid[MSB - 2 : 0], 1'b0}; //no cycle
end
1'b1: begin
q_mid <= {1'b0, q_mid[MSB - 1 : 1]}; //no cycle
end
endcase
end
end
assign dout = i_dir ? (q_mid[0]) : (q_mid[MSB - 1]);
endmodule
仿真文件
`timescale 1ns/1ps
module shift_register_tb;
parameter MSB = 4;
reg i_clk;
reg i_dir;
reg i_load;
reg [MSB - 1 : 0] din;
wire dout;
initial begin
i_clk = 0;
forever begin
# 5 i_clk = ~i_clk;
end
end
initial begin
i_load = 0;
i_dir = 0;
din = $random;
# 18
@(negedge i_clk) begin
i_load = 1;
end
@(negedge i_clk) i_load = 0;
repeat(3) @(negedge i_clk); //finish shift output
din = $random;
i_load = 1;
@(negedge i_clk) i_load = 0;
i_dir = 1;
repeat(3) begin
@(negedge i_clk);
end
# 20 $finish;
end
// Monitor values of these variables and print them into the logfile for debug
initial
$monitor ("i_load=%0b, i_dir=%0b, din=%b, dout = %0b", i_load, i_dir, din, dout);
shift_register #(.MSB(MSB))inst_shift_register(
.i_clk(i_clk),
.i_dir(i_dir),
.i_load(i_load),
.din(din),
.dout(dout)
);
endmodule
监控数据
i_load=0, i_dir=0, din=0100, dout = 0
i_load=1, i_dir=0, din=0100, dout = 0
i_load=0, i_dir=0, din=0100, dout = 0
i_load=0, i_dir=0, din=0100, dout = 1
i_load=0, i_dir=0, din=0100, dout = 0
i_load=1, i_dir=0, din=0001, dout = 0
i_load=0, i_dir=1, din=0001, dout = 1
i_load=0, i_dir=1, din=0001, dout = 0
参考资料
- 参考资料1
- 参考资料2
- 参考资料3
交个朋友
-
个人微信公众号:FPGA LAB,左下角二维码;
-
知乎:李锐博恩,右下角二维码。
-
FPGA/IC技术交流2020
最后
以上就是可爱电灯胆最近收集整理的关于Verilog设计实例(6)基于Verilog的各种移位寄存器实现的全部内容,更多相关Verilog设计实例(6)基于Verilog内容请搜索靠谱客的其他文章。








发表评论 取消回复