4 电动汽车加速指标设计
对电动汽车驾驶指标的设计,需要建立动态模型,并求解微分方程。因在恒功率段微分方程无理论解,只有数值解法,因此需要做离散求解插值分析。而该微分方程与ADVISOR等仿真软件一样,是通过设定已知动力系统参数求出t-v动态关系。因此需要最优化工具作为设计辅助。
4.1 动力系统微分方程
将汽车作为研究质点,由牛顿第二定律得:
式中,T是电机输出最大扭力,如图1中的修正加速性能理论线。它是关于车速v的函数,分为恒扭力段与修正恒功率段。
微分方程(10)在恒功率段不能使用理论法求解,因此使用数值解法。本文使用固定步长为0.1s的龙格-库塔法求解。
4.2 t-v曲线插值与目标函数构建
解得步长为0.1s的t-v曲线,对于百公里加速时间10s的汽车,若使用就近原则,则误差为0.05/10=0.5%,若提高精度,可以将步长减少到0.01s或0.001s,但实际证明,步长增大很影响计算速度,且其精度不如使用线性插值方式接近。因此本文使用步长0.1s,结合插值法使用。
汽车加速性能曲线t-v是单调递增的,因此每个电机峰值功率对应一组加速时间。该函数命名为P m ax2 tv1-v2
则构建目标函数:

4.3 使用单纯形法优化求解
对于不同车速加速度段指标,在式(13)中设置v1,v2即可。本文基于(13)式设计电机的不同指标功率有如下4项:P 0~ 50, P 50 ~80,P 0~ 100, P v1 ~v2。
该最优化问题只有 待优化参数,因此使用二分法、最速下降法、单纯形优化法等优化工具都是可行的。本文发现使用单纯形法解该问题速度更快,且MATLAB中自带该函数。因此本文选择使用单纯形法求解该优化问题。
5 设计实例
通过最高车速、加速性能、爬坡性能三类指标的设计,可以看出电机的最大转速仅与汽车最高设计速度有关,而电机峰值功率则与各指标均相关。因此对于电机功率设计是冗余设计,取满足最苛刻指标的功率。

重新依据公式(1)~(12)逆向计算出真实指标与目标指标的偏差,作为指标达成度。达成度越大的指标说明初始指标定义过高;达成度越小的指标为100%,说明该指标是当前定义的所有指标中动力系统最难以达成的指标。
5.1 已知参数
纯电动汽车设计阶段,首先根据市场调研结果对车身参数与动力性指标进行初步定义。表1所示举例为某车型的市场调研阶段定义的动力性能指标,表2所示举例为该车型整车及动力总成已知参数。基于以上公式在MATLAB中编制设计程序,设计结果如下。
5.2 设计结果
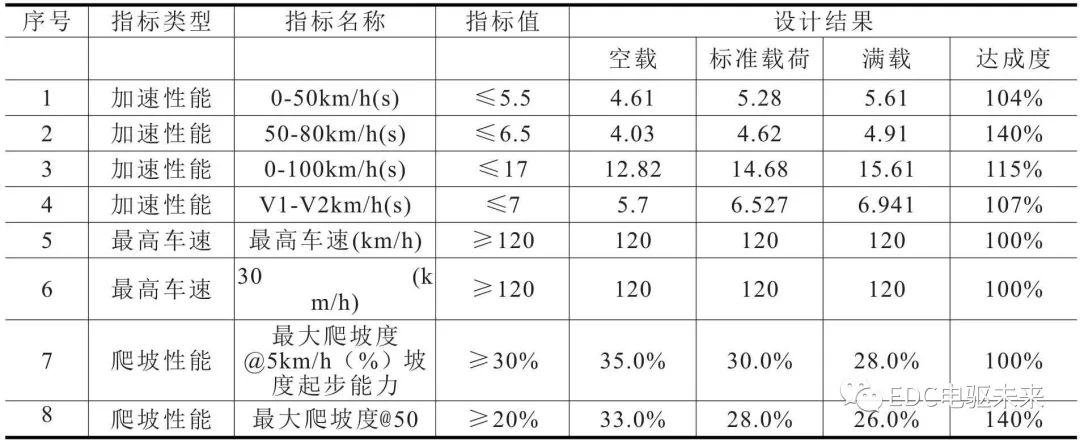
经过设计,被测电机的最高转速为8900rpm,峰值功率为57kW,峰值扭力为155Nm。设计MAP如图2所示。空载,标准载荷,满载的动力性参数对比如表3所示:
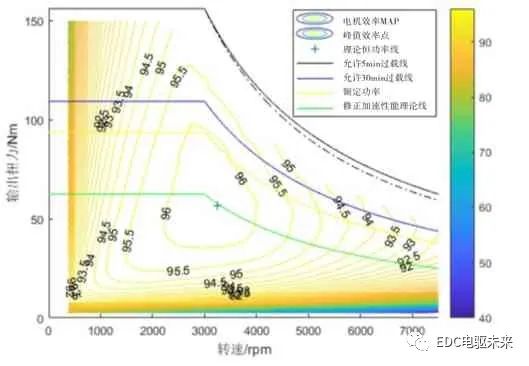
图2 电机MAP及其外特性设计结果
6 结论
电动汽车动力性指标与驱动电机参数的关系研究具有冗余设计的特点。将设计指标定义全面,各指标设计求算更合理,才能获得更高精度的设计结果。本文总结了电动汽车的加速性能指标、爬坡性能指标、最高车速指标,并研究了各类指标的设计方法。实践证明,该方法有效可靠,应用于电机选型设计阶段。当电机选型确定并在市场上找到对应的电机供应商以后,为下一步汽车动力性经济性仿真开发工作提供更精确的电机参数。
表3 设计结果
最后
以上就是甜甜小蝴蝶最近收集整理的关于matlab画电机效率map图程序_基于动力性指标的纯电动汽车电机参数设计(3)的全部内容,更多相关matlab画电机效率map图程序_基于动力性指标内容请搜索靠谱客的其他文章。








发表评论 取消回复