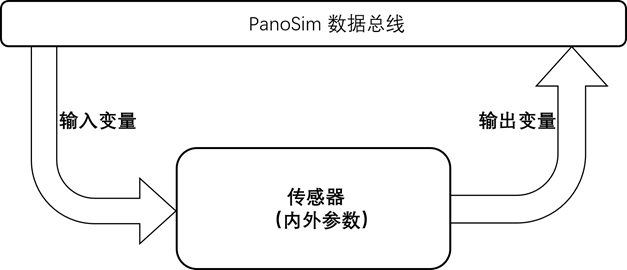
PanoSim内置7类传感器模型。传感器的一般化模型如图所示。
1、Mono系列
1.1 MonoCamera_G
单目相机传感器仿真单目相机的功能,生成图片或视频流。

MonoCamera_G支持基础参数设定,包括分辨率、水平/垂直视野范围、焦距等。另外,该模型引入成像特性算法,能够模拟各种复杂的实际成像过程中的物理特性,其中包括畸变,模糊、暗角、景深、色像差、噪声、运动模糊、颜色校正、伽马等。PanoSim提供技术支持,实现对该传感器各类参数进行标定匹配,从而可以定制化的模拟特定型号的单目相机。不同子类视野范围和焦距参数的缺省值不同,分别代表安装了短焦,中焦,和长焦镜头的通用单目相机。这些参数可以根据需求由用户自行调整。
1.2 MonoDetector_Lane
MonoDetector_Lane为基于单目相机的车道线传感器,以车道线拟合参数的形式,返回单目相机检测的Range和FOV约束范围内检测到的车道线信息。
1.3 MonoDetector_Object
MonoDetector_Object单目相机目标真值传感器返回Range和FoV视场角范围内检测到的车辆,行人,自行车,三轮车和动物, 交通标志及障碍物的信息。
1.4 MonoDetector_TrafficLight
MonoDetector_TrafficLight单目相机交通灯真值传感器返回Range和FoV视场角范围内检测到的前方交通灯信息。
2、Fisheye
鱼眼相机传感器仿真鱼眼相机的功能,生成图片或视频流。

该鱼眼摄像头传感器能够模拟模糊、暗角、色像差、噪声、颜色校正、伽马等成像特性。PanoSim提供技术支持,实现对该传感器各类参数进行标定匹配,从而可以定制化的模拟特定型号的鱼眼相机。
3、Radar
该传感器模拟目标级毫米波雷达返回检测范围内目标信息。
该传感器的输出变量为在FOV范围内,被探测到目标的ID、目标类型、目标水平方位角、目标垂直高度角、目标多普勒速度、目标径向距离、目标RCS值。
4、Lidar
该传感器模拟目标级激光雷达传感器返回检测范围内目标信息。

该传感器模型包含激光扫描线数,扫描频率等基本参数,支持非均匀分布的点云生成。另外,该传感器引入天气衰减模型,能够模拟不同天气因素对探测结果产生的影响,其中衰减系数通过激光波长、大气能见度、降雨速率、降雪速率、降雪量等变量计算得到。
5、Ultrasonic
5.1 Ultrasonar_G
该传感器模拟超声雷达输出在FoV范围内,被探测到最近距离目标的信息。
超声模型引入了高精度声速模型,从而实现对实际超声传感器的高保真模拟。该高精度声速模型模拟了天气对超声波的衰减影响。其中,气温、气压、湿度对不同频率声波的影响由不同的衰减系数计算;引入了复杂的声衰减算法,可以精准描述声波在空气传播中的衰减。该传感器模型还根据实际超声传感器计算测距精度的统计方法引入测距精度参数,可以完整的模拟该雷达的测距真实性能。
5.2 ParkingSpaceDetector
该传感器为空车位检测真值传感器,输出在检测范围内被探测到的空车位信息。
该传感器输出半径为Range的圆周内空车位角点坐标。输出的空车位数量不超过设定的Max Number,输出的空车位顺序按照空车位中心点与车辆坐标系原点的距离由近及远排序。
6、GNSS
GNSS(Global Navigation Satellite System)全球导航卫星系统传感器模拟发送传感模型所在位置的GNSS信息。从UTM坐标系转换成WGS84坐标系对应的经纬度。
模型输出依次为GNSS模型当前时间戳、经度、纬度、高度、自车行驶方向及速度。
7、IMU
IMU (Inertial Unit) 惯性测量单元传感器主要模拟具有6通道输出信号的三轴惯性导航单元。
最后
以上就是超帅洋葱最近收集整理的关于PanoSim5.0介绍——传感器模型简介1、Mono系列2、Fisheye3、Radar4、Lidar5、Ultrasonic6、GNSS7、IMU的全部内容,更多相关PanoSim5内容请搜索靠谱客的其他文章。








发表评论 取消回复