旋转矩阵用9个量来描述3自由度的旋转,具有冗余性;
欧拉角虽然用3个量来描述3自由度的旋转,但是具有万向锁的问题,
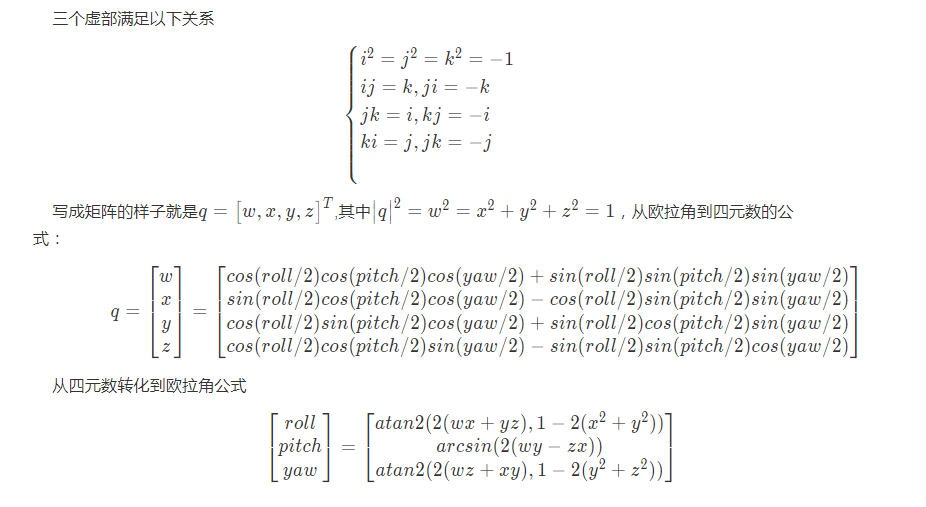
因此我们选择用四元数,(ROS当中描述转向的都是采用的四元数)。一个四元数拥有一个实部和三个虚部组成。
q=w+xi=yj+zk
最后
以上就是超帅枫叶最近收集整理的关于ROS中为什么用四元数描述运动控制的全部内容,更多相关ROS中为什么用四元数描述运动控制内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。
旋转矩阵用9个量来描述3自由度的旋转,具有冗余性;
欧拉角虽然用3个量来描述3自由度的旋转,但是具有万向锁的问题,
因此我们选择用四元数,(ROS当中描述转向的都是采用的四元数)。一个四元数拥有一个实部和三个虚部组成。
q=w+xi=yj+zk
以上就是超帅枫叶最近收集整理的关于ROS中为什么用四元数描述运动控制的全部内容,更多相关ROS中为什么用四元数描述运动控制内容请搜索靠谱客的其他文章。








发表评论 取消回复