图是转载的,以下文字部分是我的个人理解。
首先,坐标系一定不要搞错——右手坐标系,然后,我的记忆方法是酱的。可能有点笨,仅供参考。
先确定谁绕哪个轴转。yaw的首字母为y,所以是绕y轴旋转的。yaw也叫航向角,偏航角,方位角。
再确定xyz都是哪个方向。我们知道z表深度,简单说人向前走一步就是深度。所以z向是向飞机前方指的。
确定了z向就知道了其余,对应着y是yaw,就可以了。
--------------------------------------------------------------------------------------------------------------------------------------------
三维空间的右手笛卡尔坐标如图1所示。
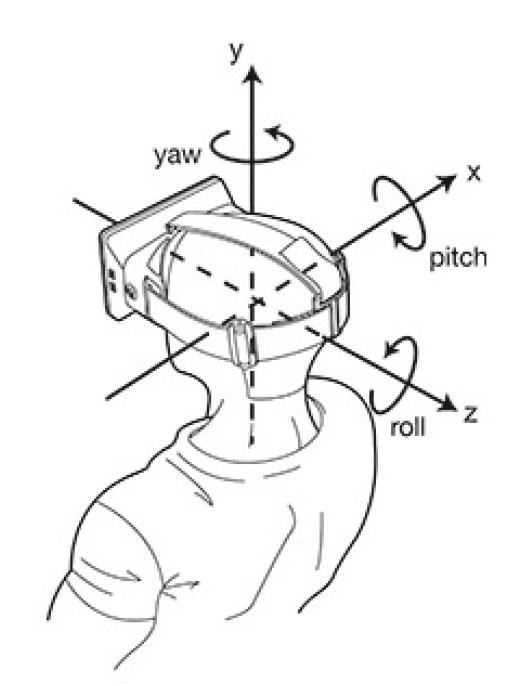
图1
在航空中,pitch, yaw, roll如图2所示。
pitch是围绕X轴旋转,也叫做俯仰角,如图3所示。
yaw是围绕Y轴旋转,也叫偏航角,如图4所示。
roll是围绕Z轴旋转,也叫翻滚角,如图5所示。
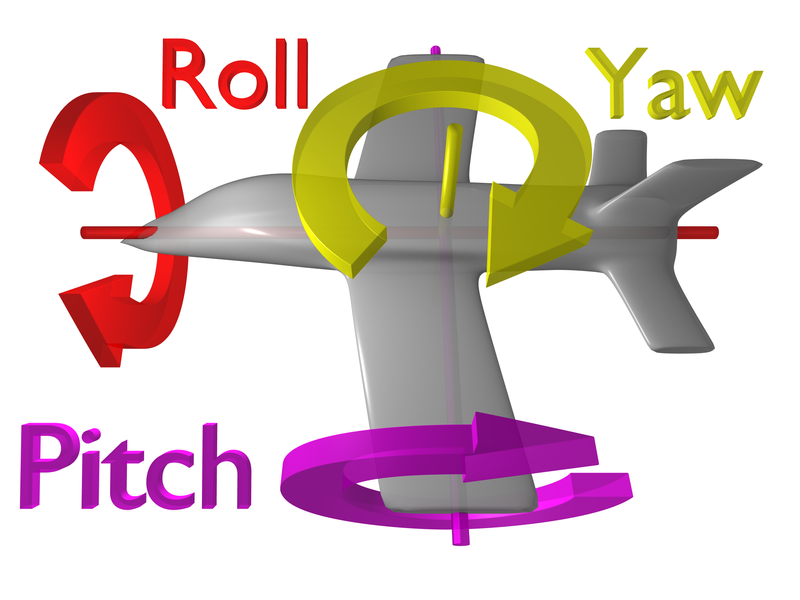
图2
图3
图4
图5
最后
以上就是灵巧大象最近收集整理的关于pitch yaw roll的全部内容,更多相关pitch内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。







![[UE4]roll pitch yaw](https://www.shuijiaxian.com/files_image/reation/bcimg15.png)
发表评论 取消回复