我是靠谱客的博主 可爱帆布鞋,这篇文章主要介绍ardupilot 自动控制系统的要求目录摘要0.简介:控制系统的基本要求1.典型的外作用2.传递函数3.线性系统的时域分析,现在分享给大家,希望可以做个参考。
目录
文章目录
- 目录
- 摘要
- 0.简介:控制系统的基本要求
- 1.典型的外作用
- 2.传递函数
- 1.传递函数的性质
- 2.传递函数的零极点
- 3.常用的典型环节
- 4.求传递函数常用的公式:梅森公式
- 5.闭环系统的传递函数
- 6.闭环系统的误差传递函数
- 在这里插入图片描述
- 3.线性系统的时域分析
- 1.典型信号输入
- 2.动态过程与稳态过程
- 3.动态性能与稳态性能
- 4.一节系统的时域分析
- 5.二节系统的时域分析
- 6.二节系统的改善
摘要
本节主要记录自己整理自动控制原理基础支持,结合ardupilot中的PID进行深层次理解。
0.简介:控制系统的基本要求
对应我们的飞行器也是一样重点需要从稳定性、快速性、准确性三个角度去考虑。
对于飞行器的准确性的重要指标是稳态误差
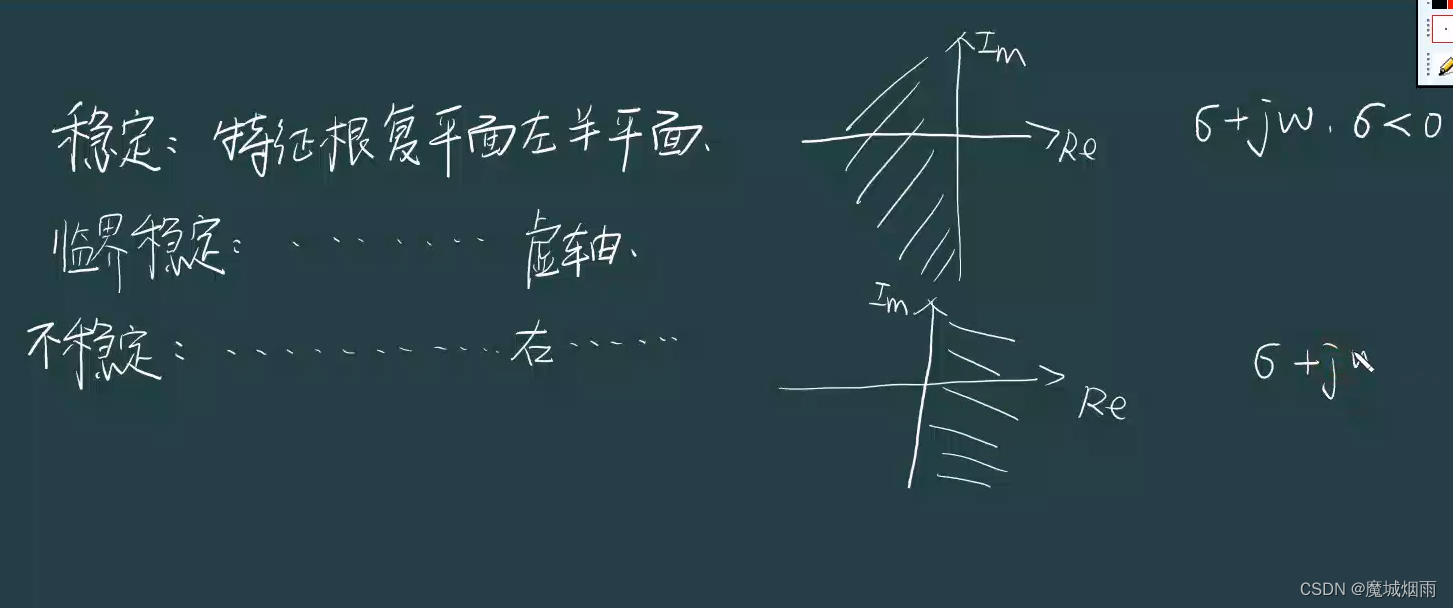
1.稳定性:系统根的极点分布情况,给定一定条件的输入,最终是否可以回到原来的平衡状态
2.快速性:过渡过程的时间及超调量
3.准确性:稳态误差
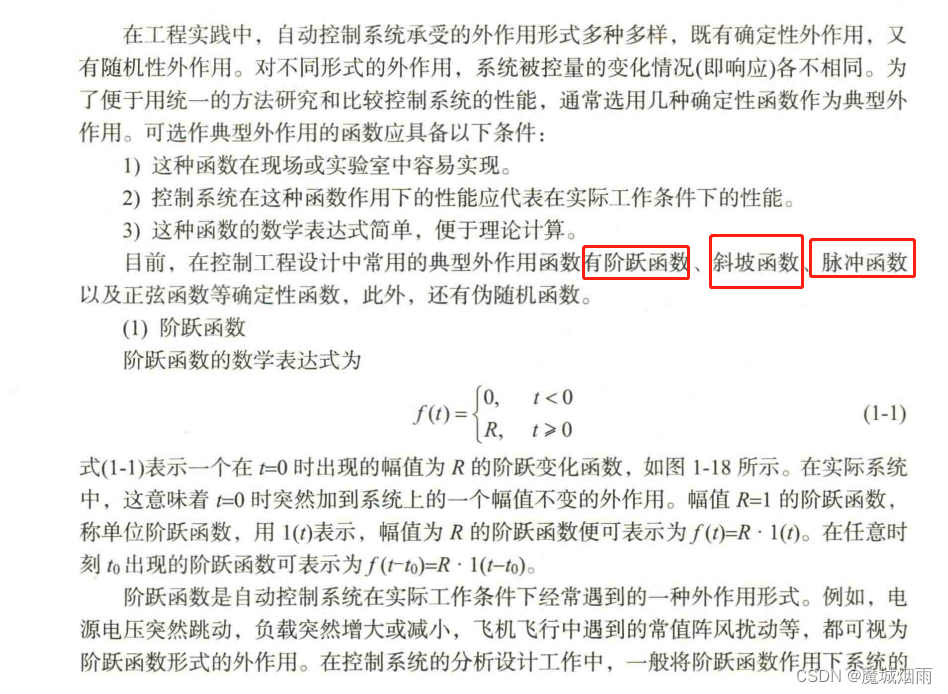
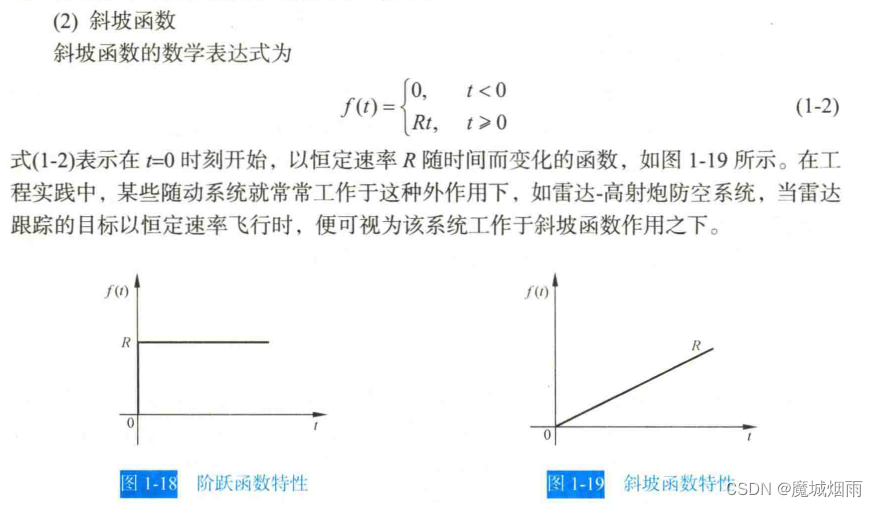
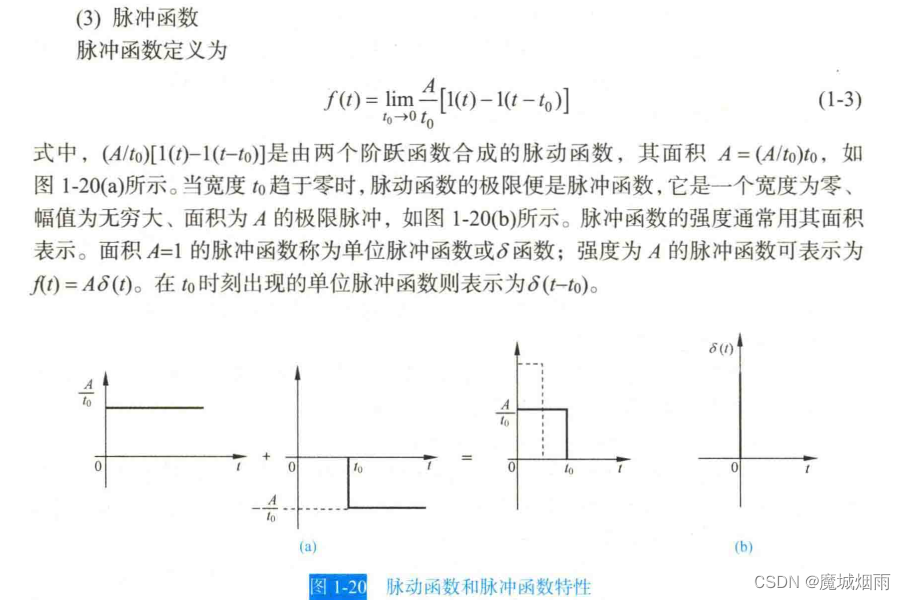
1.典型的外作用
2.传递函数
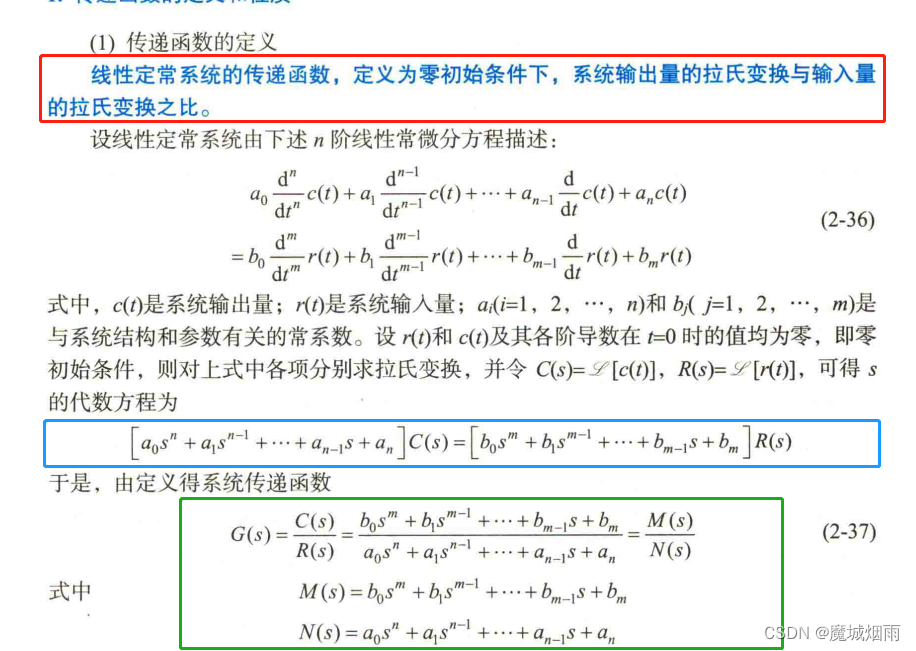
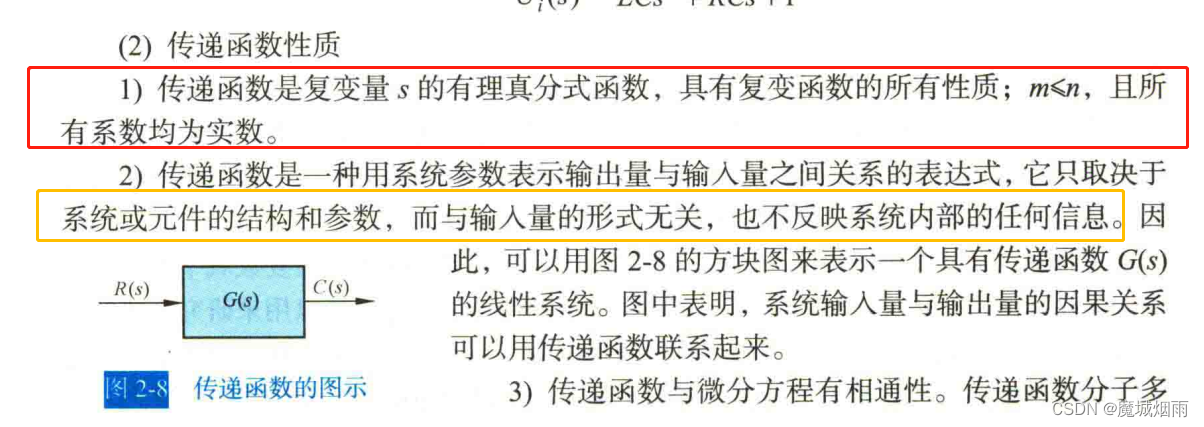
1.传递函数的性质
传递函数不仅可以表征系统的动态性能,而且可以用来研究系统的结构或参数变化对系统性能的影响。
经典控制理论中广泛应用的频率法和根轨迹法就是以传递函数为基础建立起来的,传递函数是经典控制理论中最基本和最重要的概念。
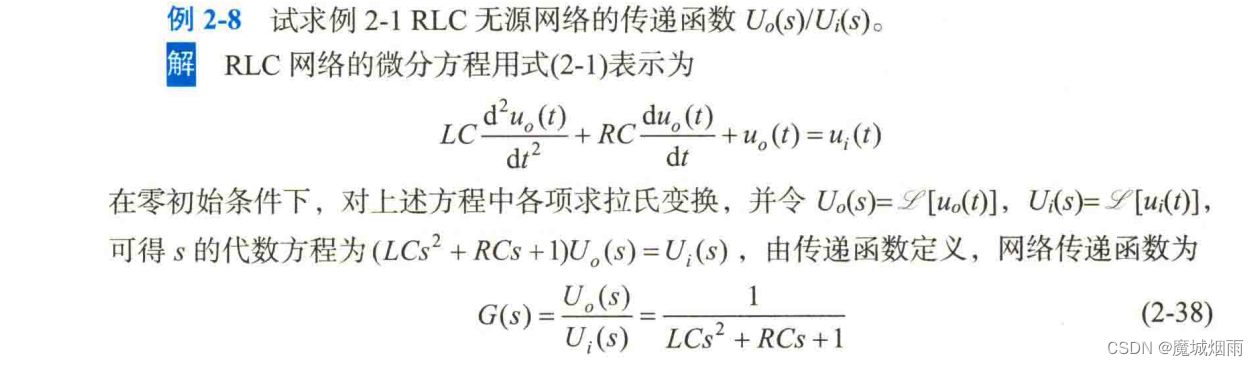
可以看个基本的例子:
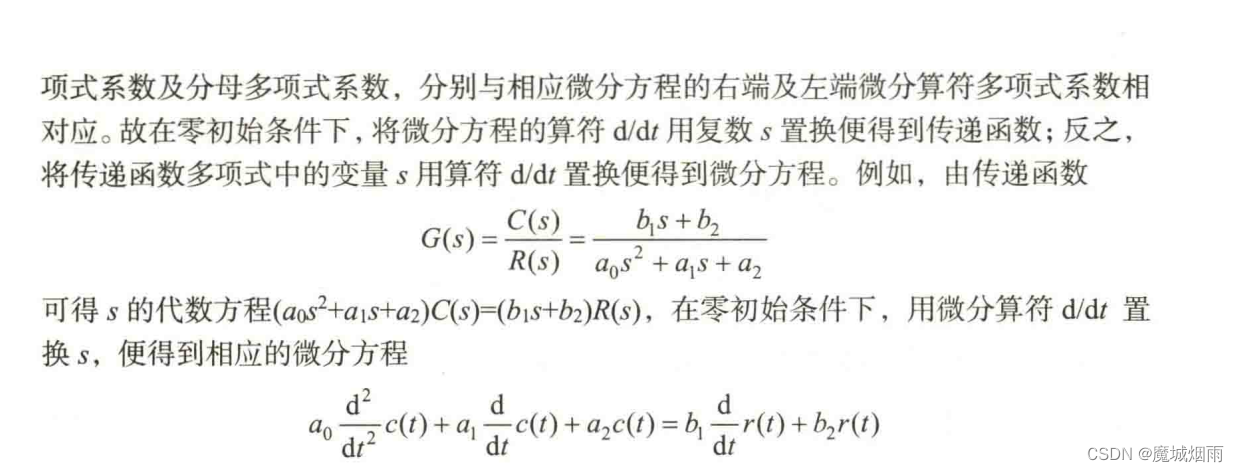
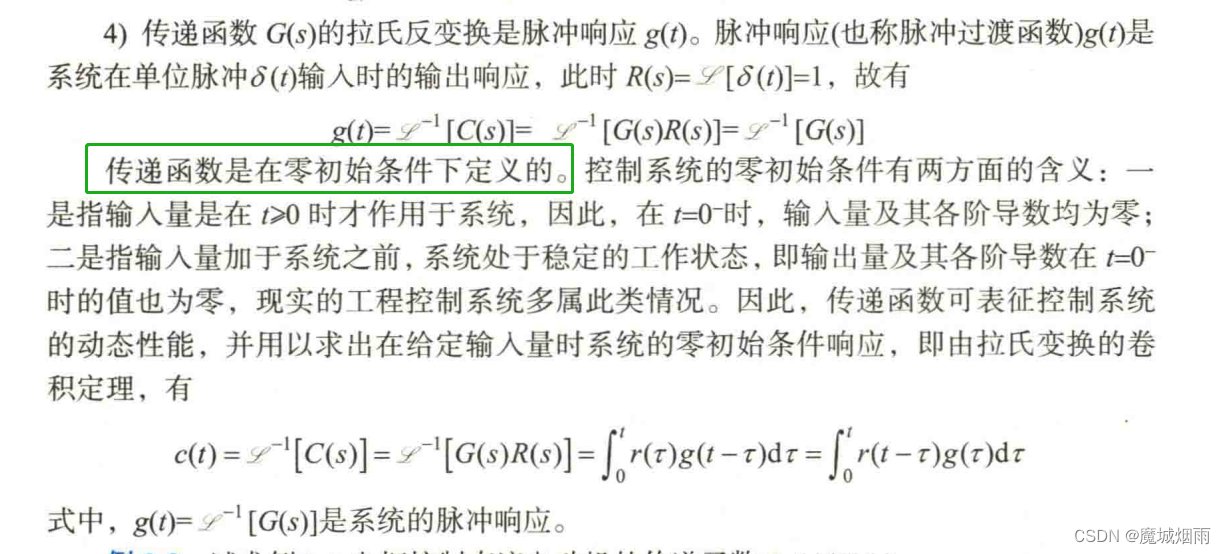
传递函数的性质:
这里我们可以看个无人机中比较重要的电机模型:
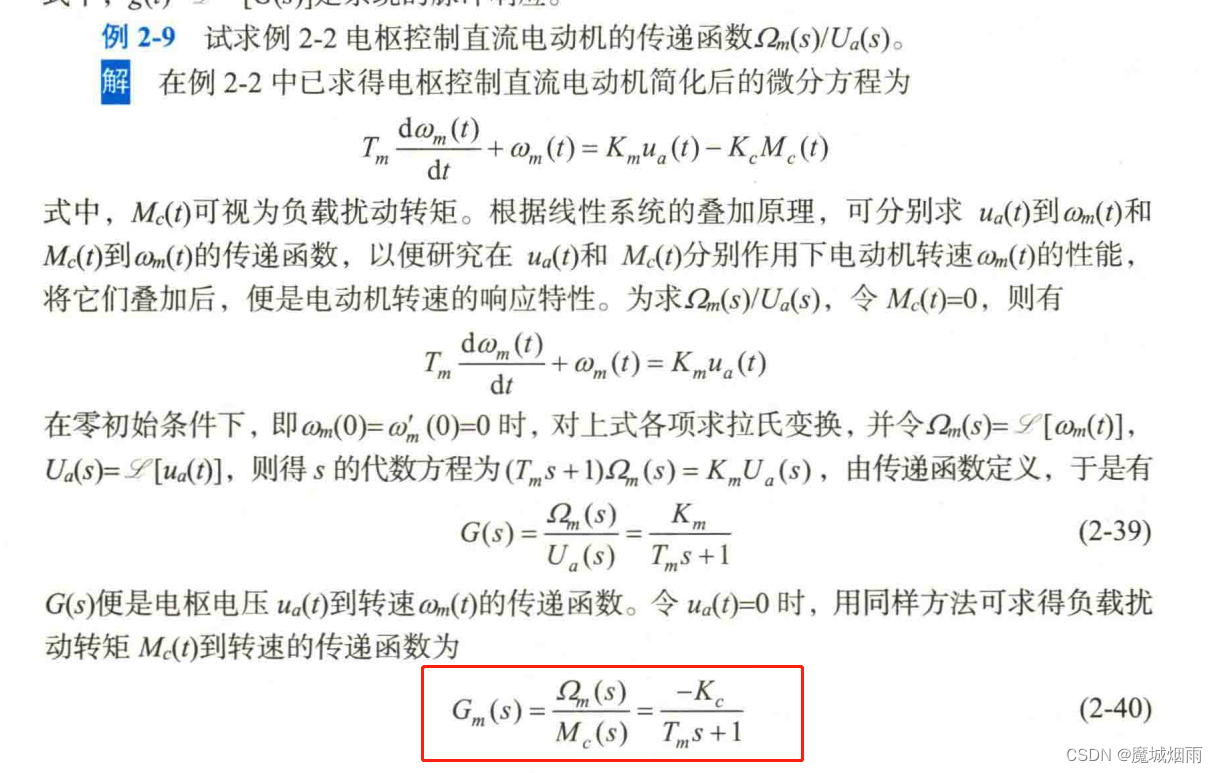
可以看出电机的模型是一个一阶惯性环节。
2.传递函数的零极点
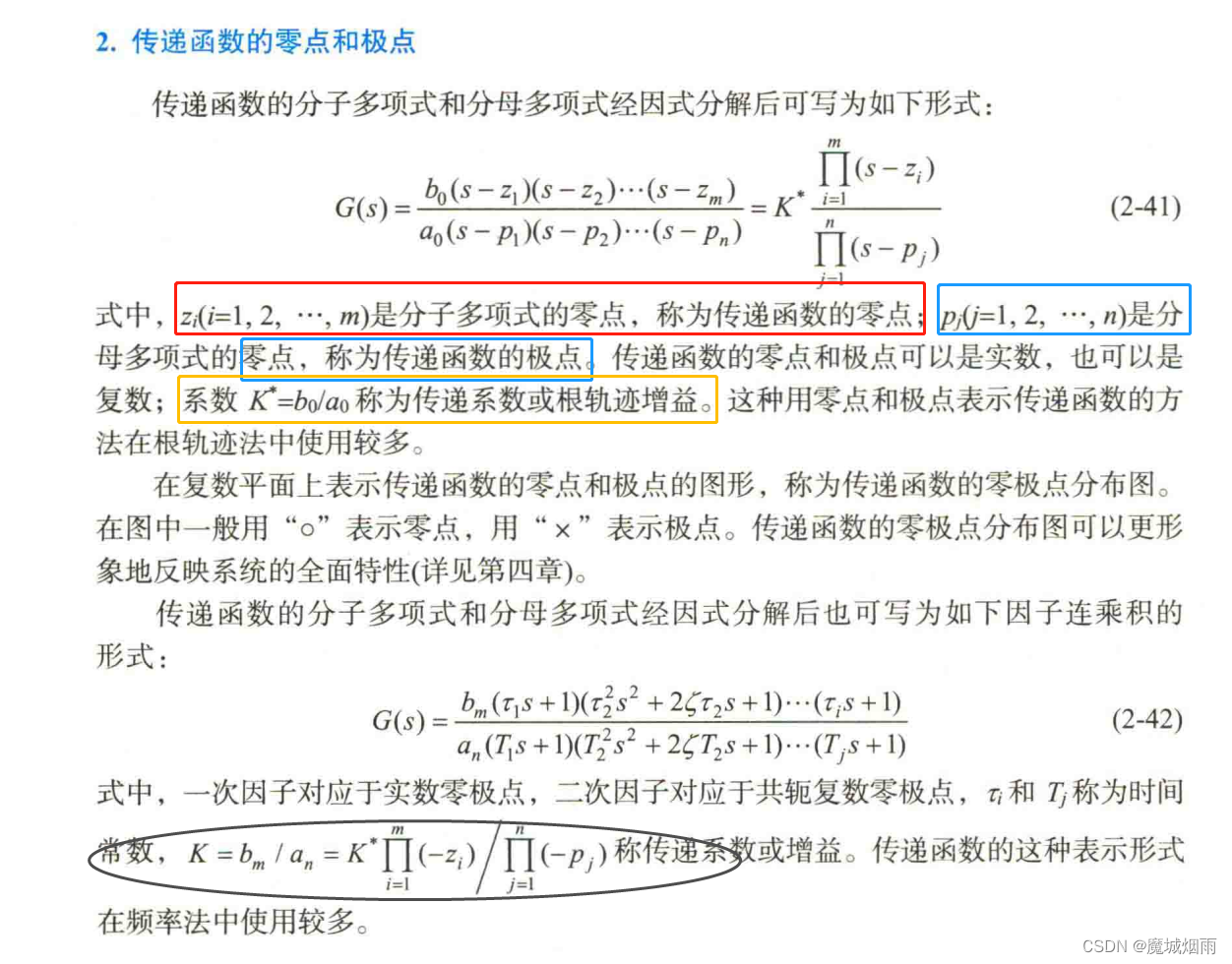
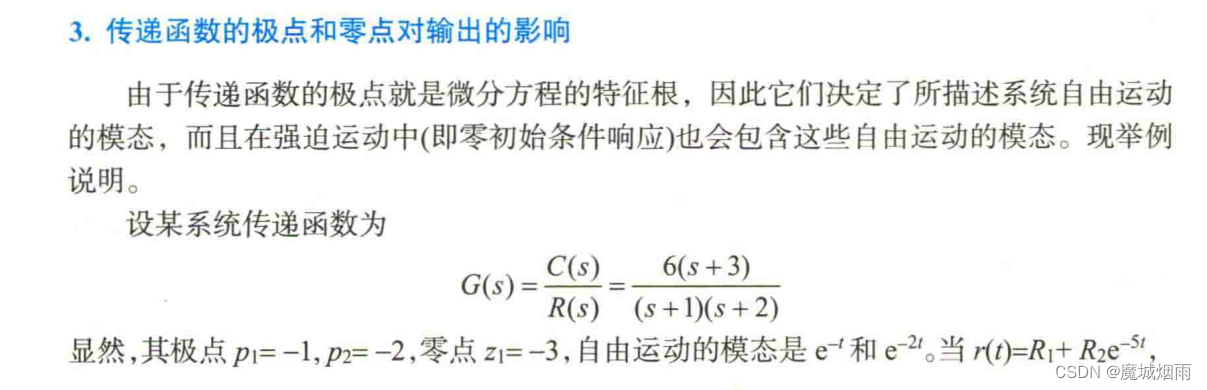
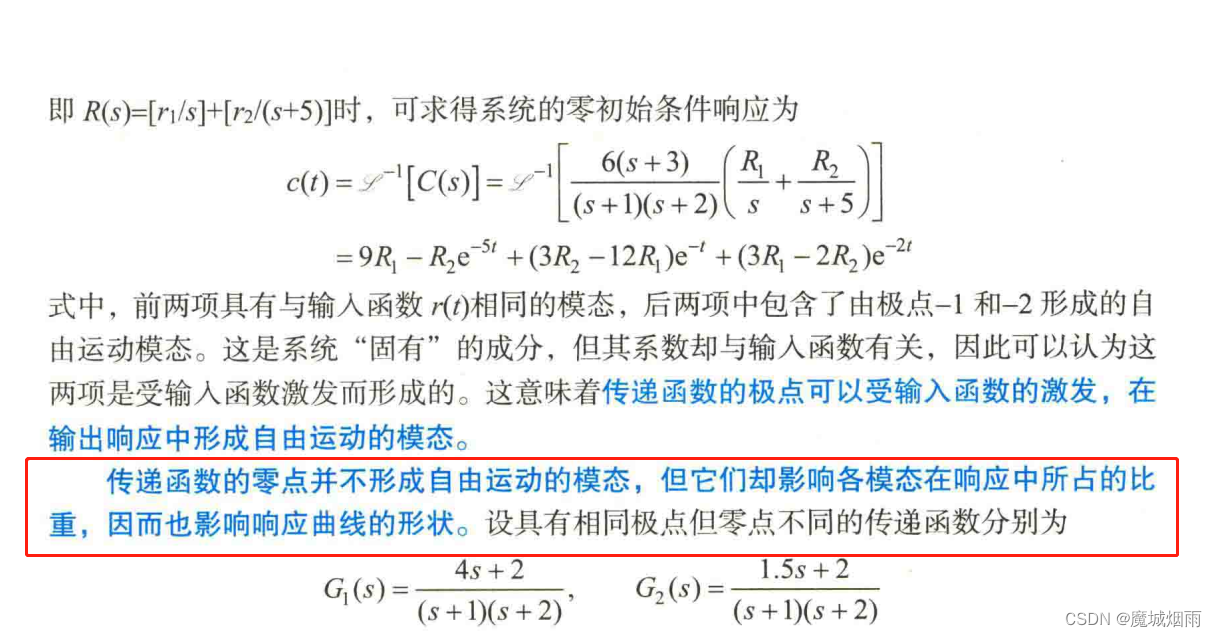
传递函数的零极点最重要结论:零点并不形成自由运动的模态,但他们却影响哥模态在响应中所占的比重,因而也影响曲线的形状。
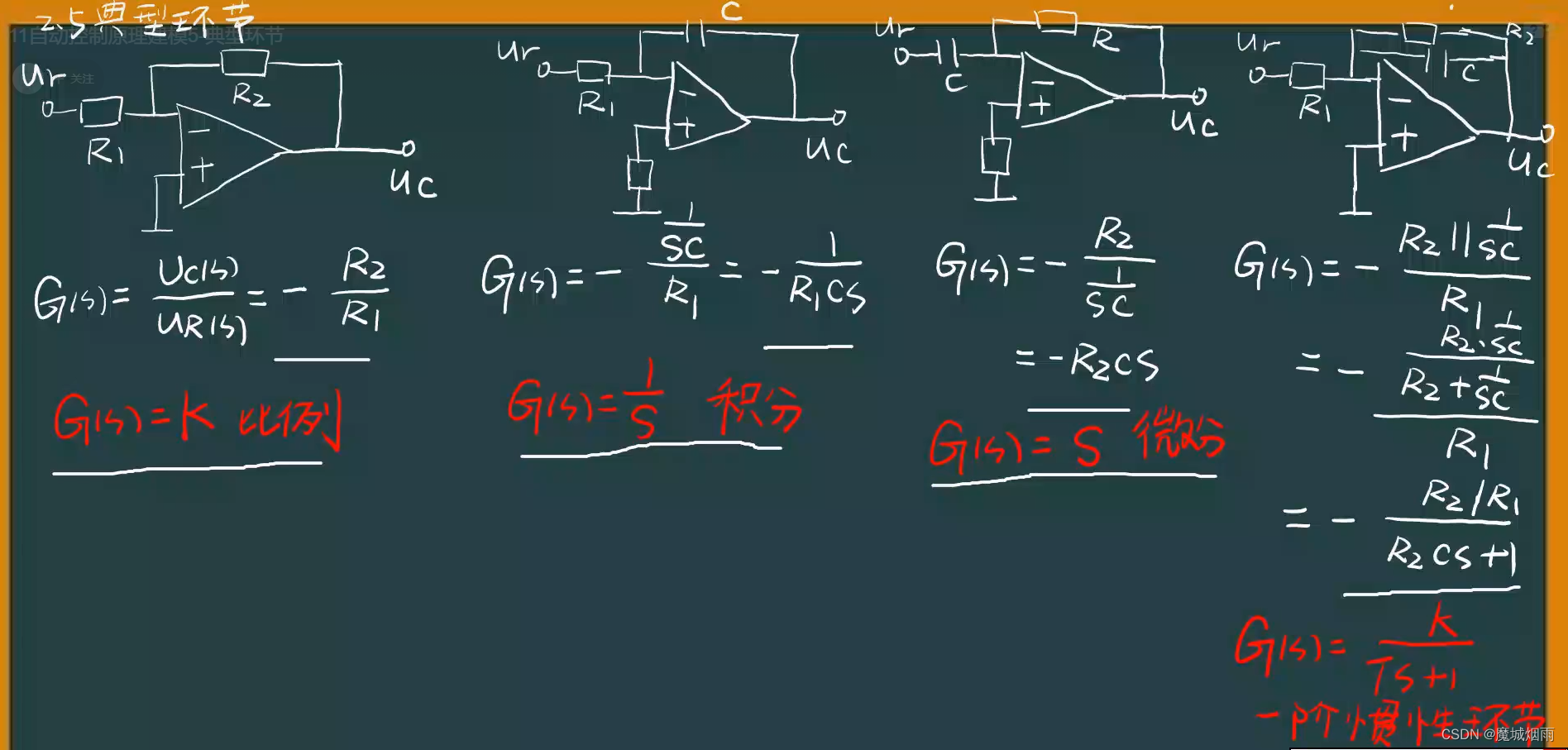
3.常用的典型环节
主要分为:比例环节、积分环节、微分环节、惯性环节
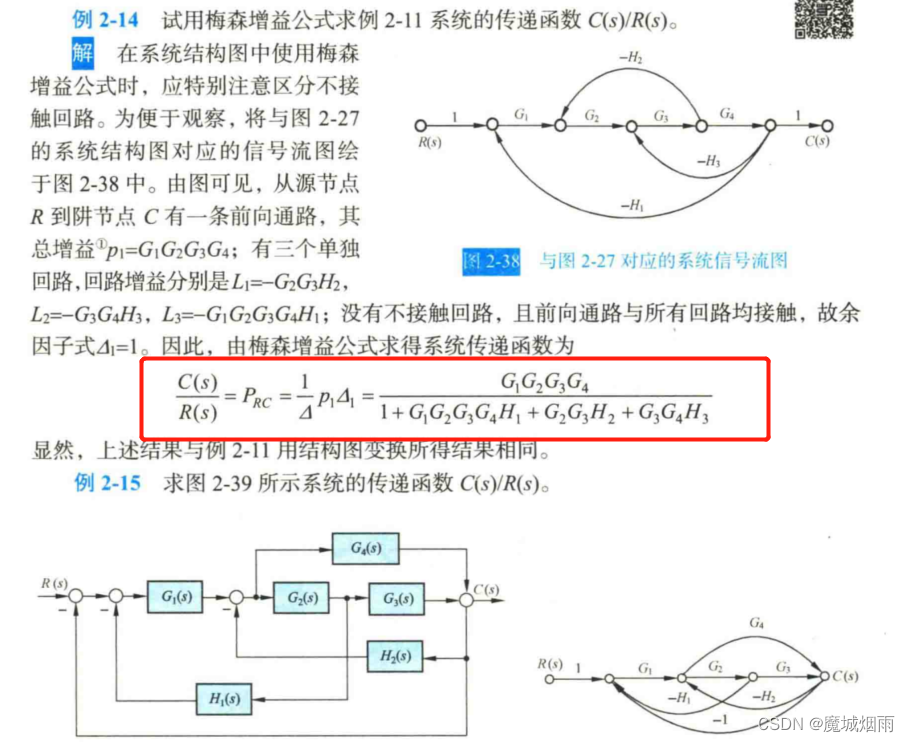
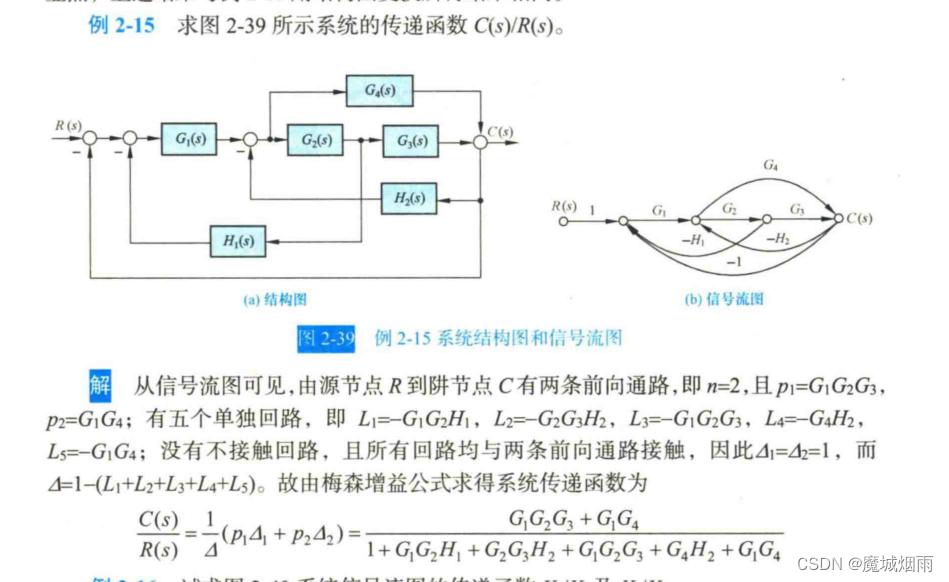
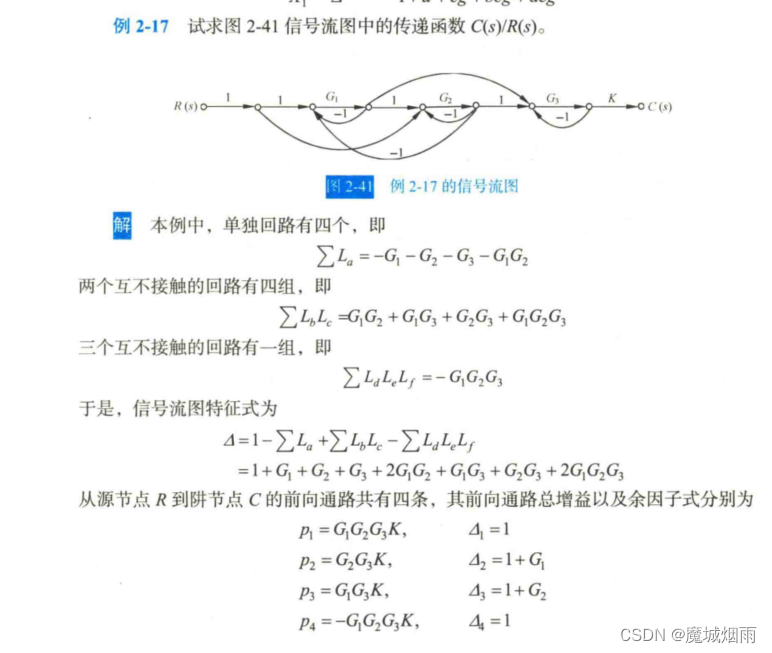
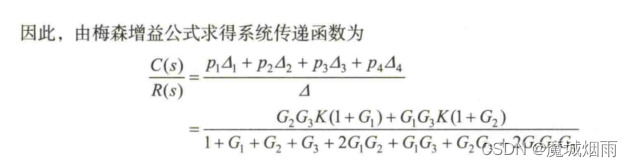
4.求传递函数常用的公式:梅森公式
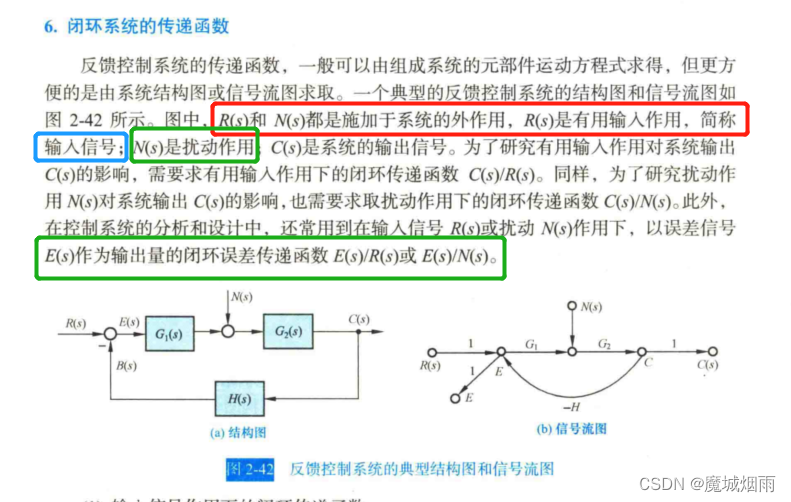
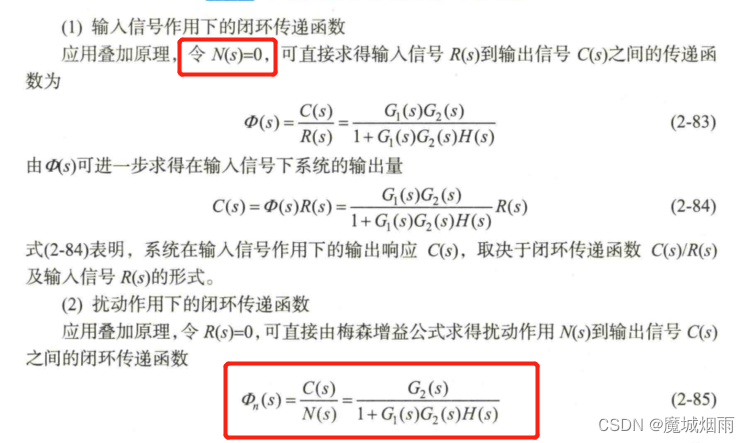
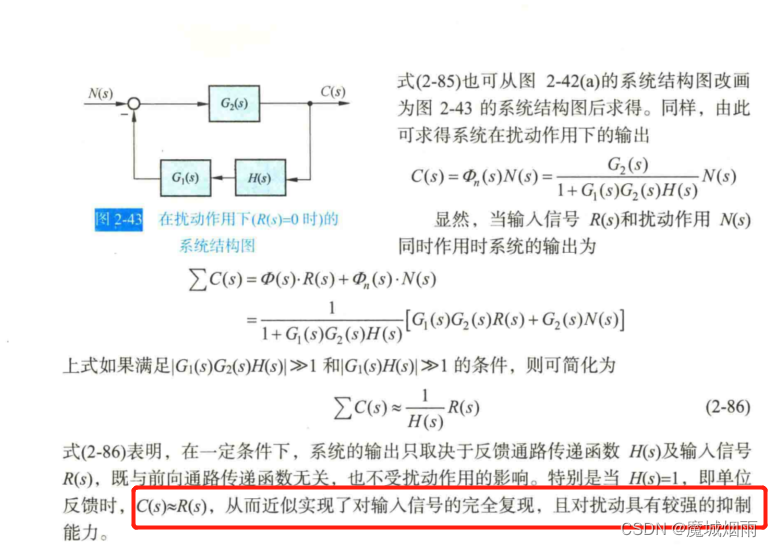
5.闭环系统的传递函数
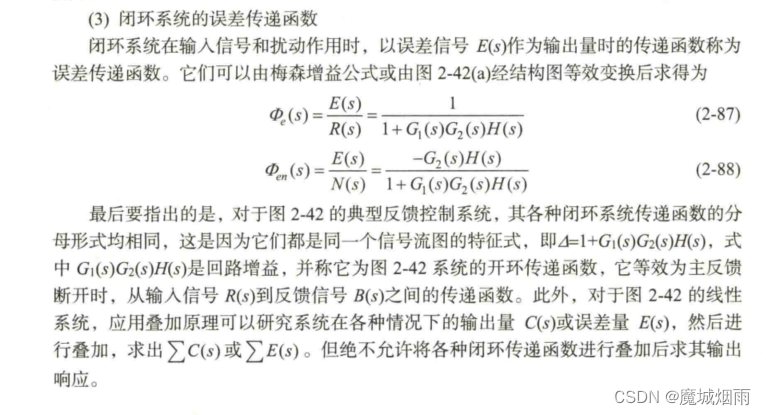
6.闭环系统的误差传递函数
3.线性系统的时域分析
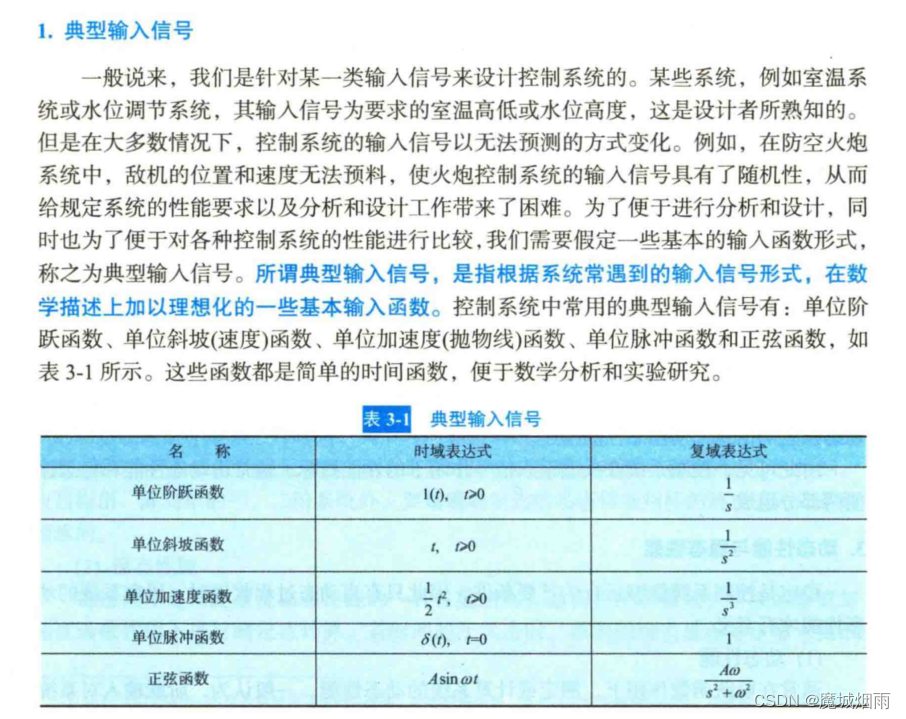
1.典型信号输入
2.动态过程与稳态过程
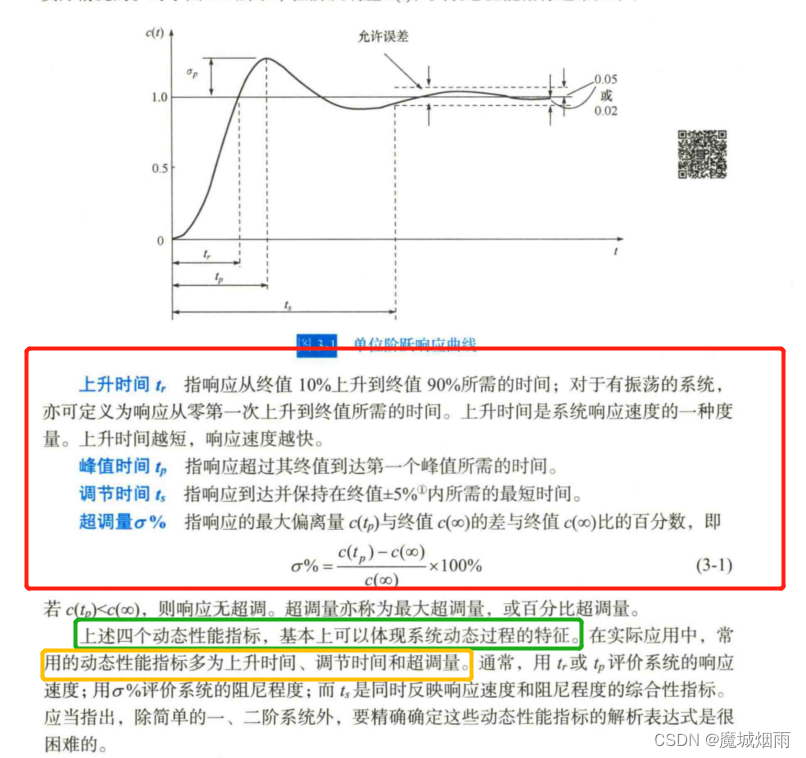
3.动态性能与稳态性能

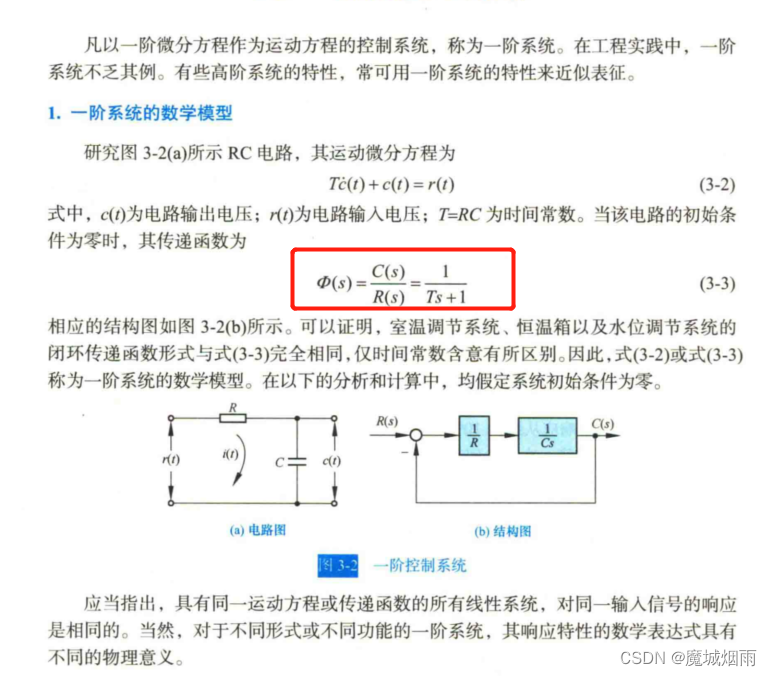
4.一节系统的时域分析
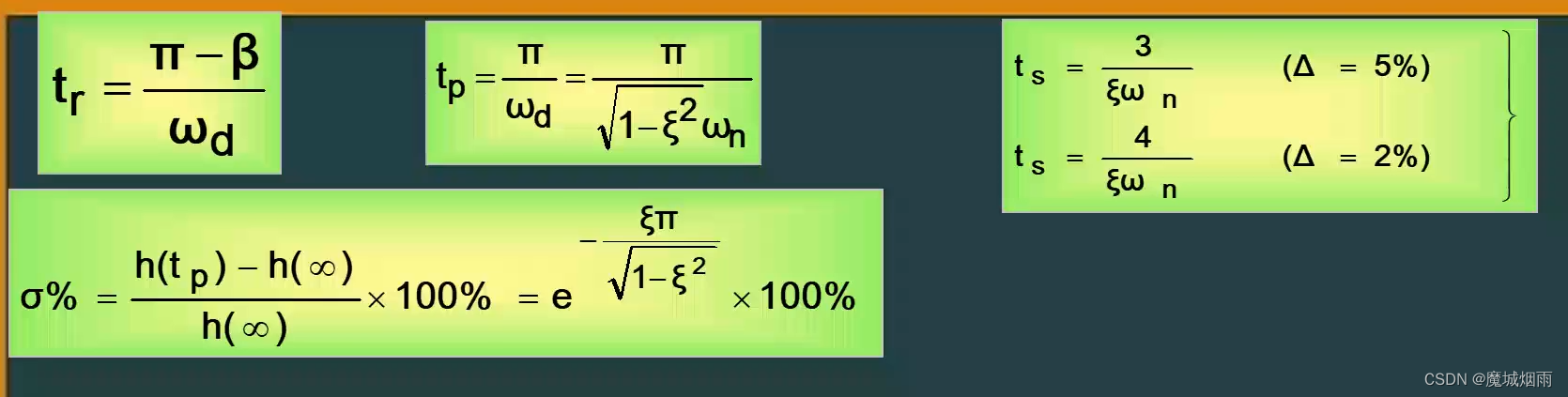
5.二节系统的时域分析
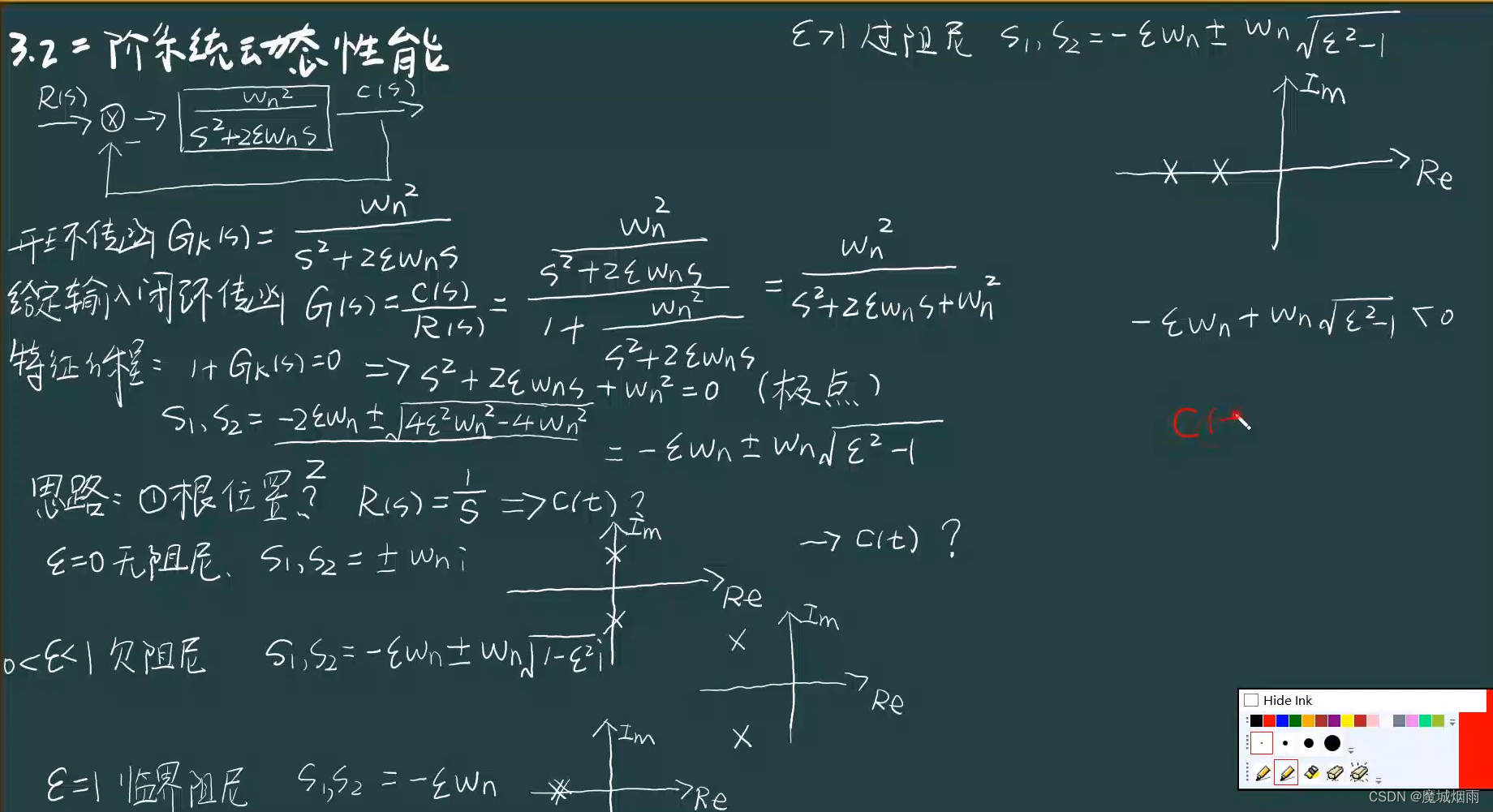
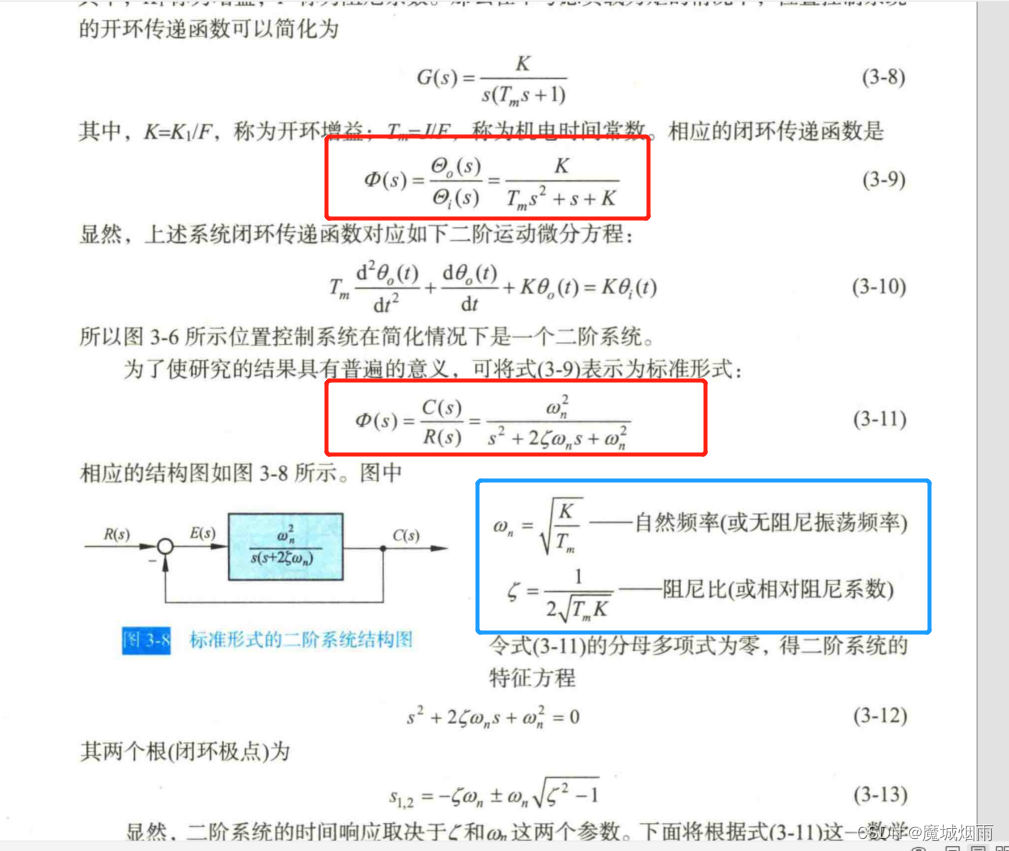
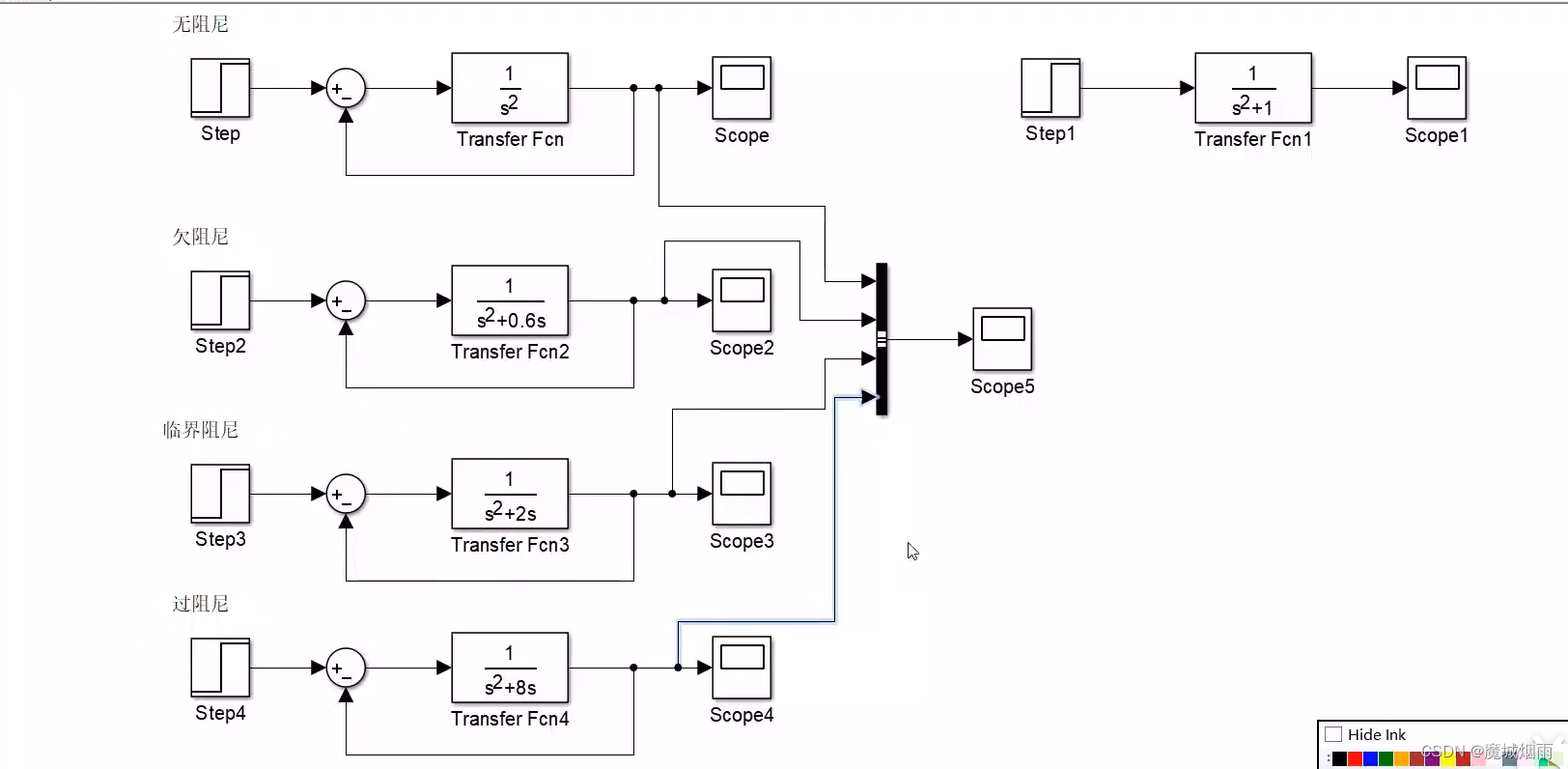
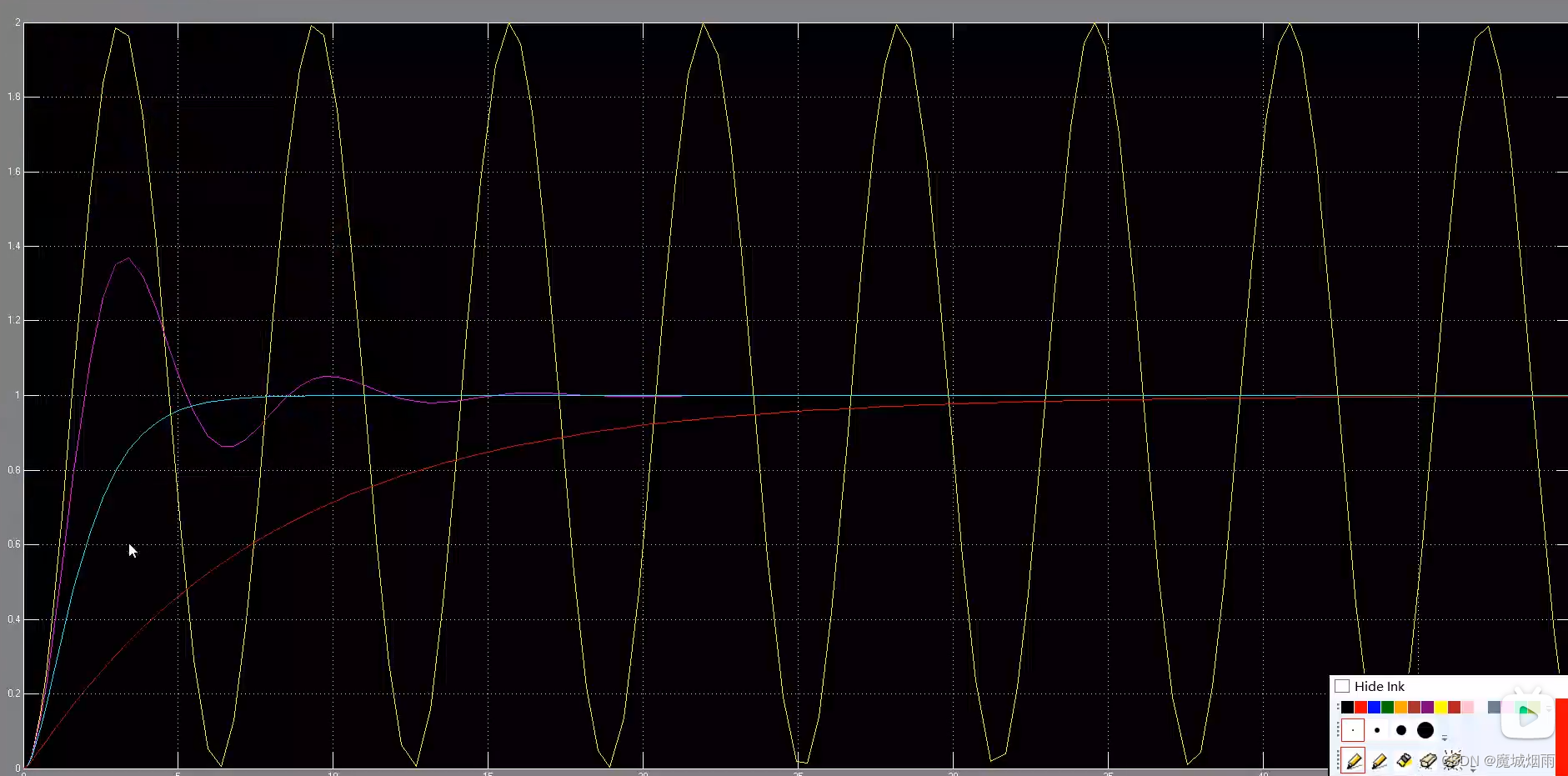
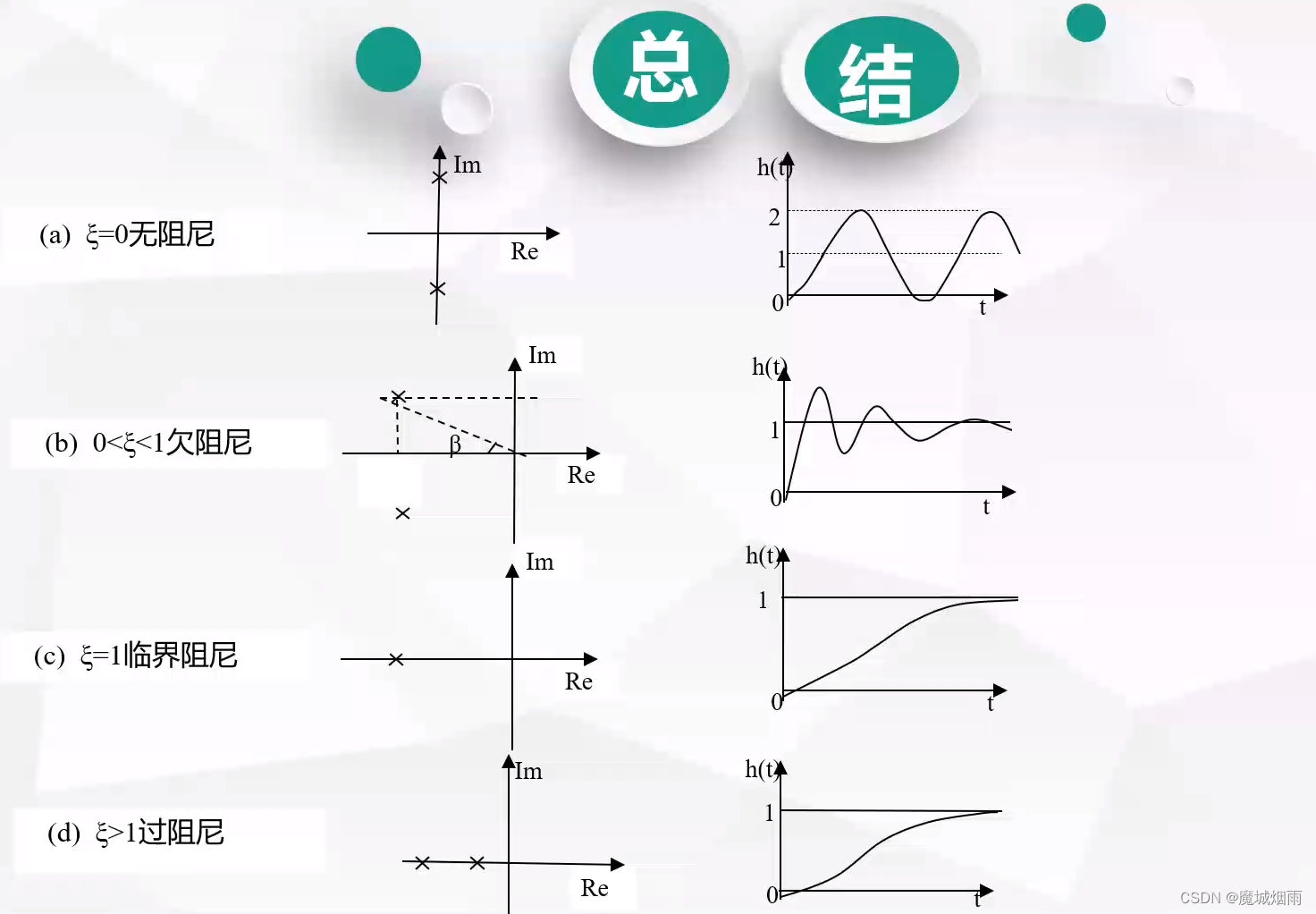
欠阻尼系统的分析
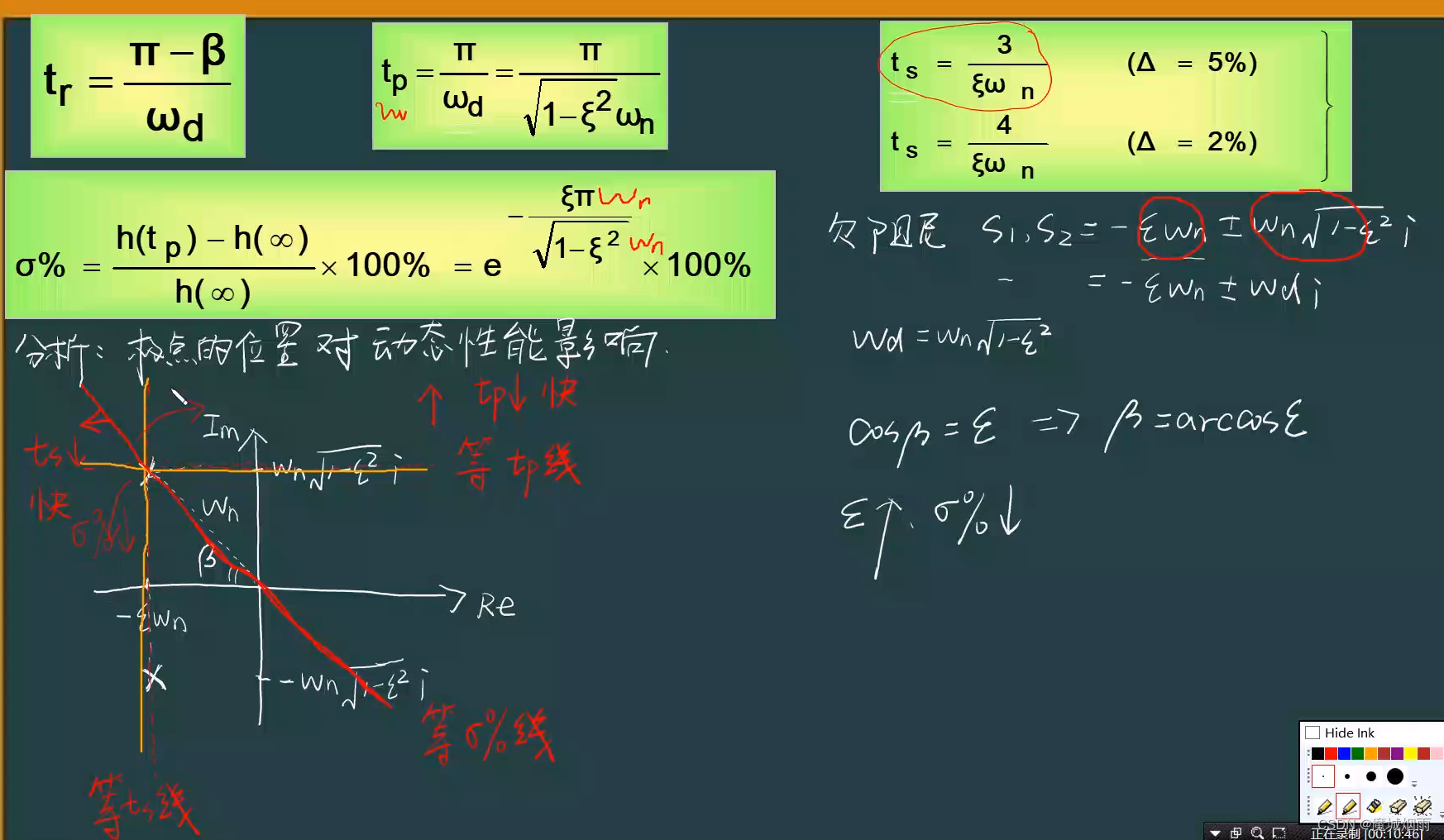
这个图非常非重要!!!
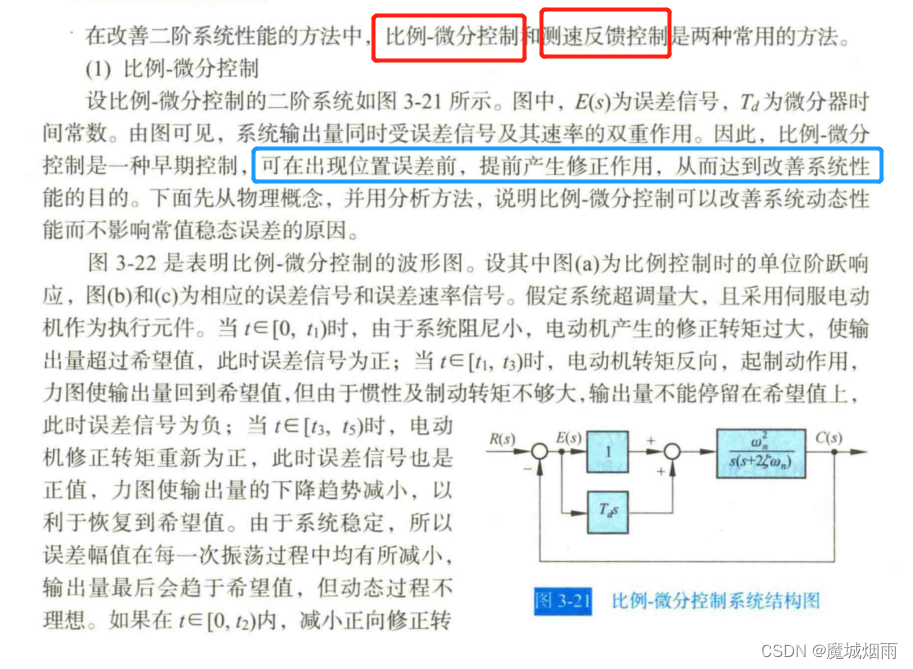
6.二节系统的改善
最后
以上就是可爱帆布鞋最近收集整理的关于ardupilot 自动控制系统的要求目录摘要0.简介:控制系统的基本要求1.典型的外作用2.传递函数3.线性系统的时域分析的全部内容,更多相关ardupilot内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复