基于UP30飞控系统的无人机地面站航线规划方法
UP30型无人机飞控系统是一个高性能低价格的无人机控制系统,包含:机载飞控、地面站、通讯设备。可以稳定控制各种布局的无人驾驶飞机,使用简单方便,控制精度高,GPS导航自动飞行功能强,可以设定飞行速度、飞行高度,并且有各种任务接口,方便用户使用各种任务设备。起飞后即可立即关闭遥控器进入自动导航方式,在地面站上可以随意设置飞行路线和航点,支持飞行中实时修改飞行航点和更改飞行目标点。
该飞控是无人机航测产业起步阶段,较早应用也较为广泛的一款油动无人机商业飞控,作为长时间应用过该飞控的我,对其有着独特的情感,虽然目前该飞控在市面上已经很少应用了,因为都被电动类型的飞机取代了。还是想把使用该飞控的地面站航线规划方法记录下来。

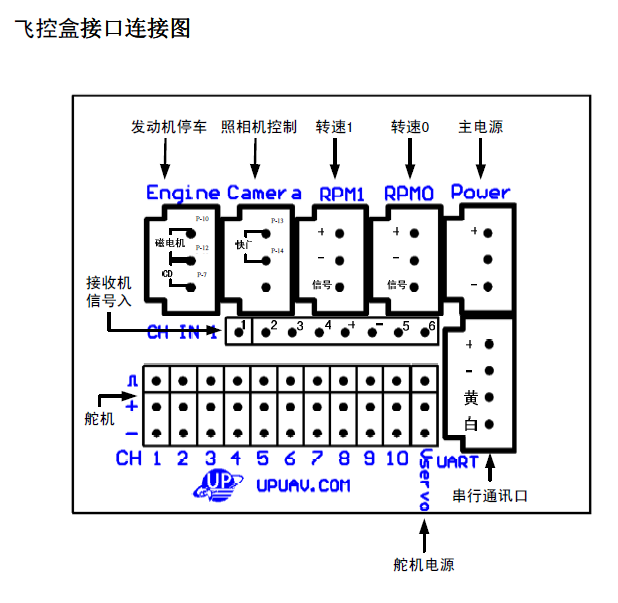
飞控接线图
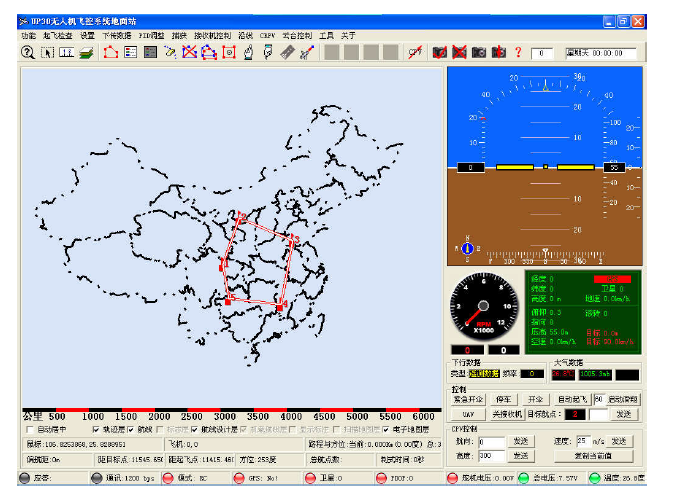
飞控界面
UP30飞控系统的无人机地面站航线设计
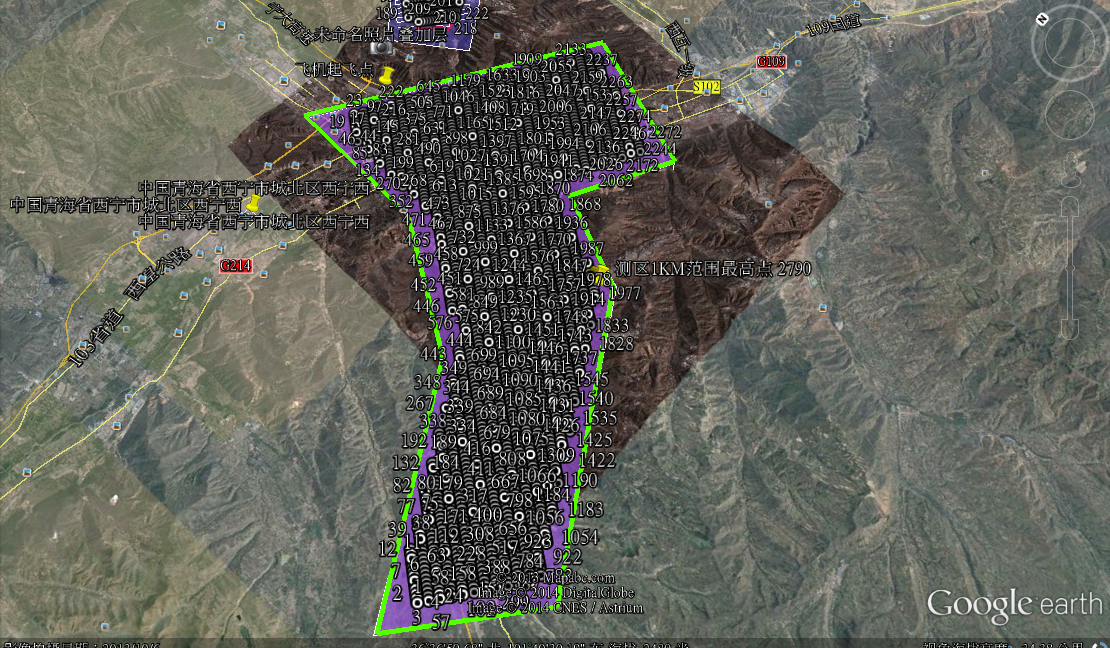
一、对于拿到的测区范围,在Google Earth中找出相应的范围,并用“添加多边形”选项标定出测区范围,然后通过改变测区的绝对航高,反复查询测区中最高点和最低点的高程(即海拔高),并用“添加地标”选项相应位置标示出来,地表名称用高程值命名。查询高程的目的是防止飞机撞山,发生事故并且为确定安全飞行高度作参考。
二、将查询好的测区范围保存为KML文件,此时打开Global Mapper软件,打开 批量转换/重投影 KML DWG 设置投影参数,
Gauss Krueger (6 degree zones) 选择测区所在经度带范围(96E-102E) 基准(WGS84) 平面(METERS) 确定即可,也可以把转换参数保存成文件,在下次转换时直接加载。
三、在Cass中打开转换好的测区DWG文件,Z A,显示测区,把显示出来的测区边界用pl重新勾画一遍,删除刚刚导入的测区,保留勾画的测区边界,“编辑,偏移拷贝 1000m,”这一步的目的是把测区扩大1000m,因为飞机在飞行时,要保证其安全飞行范围,所以要查询测区1000m以外的范围,输入purge命令,清理所有多余的图层、文件之类的,保存1000m范围测区后,反过来再在Global Mapper把刚刚保存的DWG文件转换成KML文件,具体操作“在主界面上打开数据文件 选择刚刚的投影参数 文件 输出矢量格式,选择KML/KMZ选项,把创建压缩KMZ文件选项勾去掉,保存测区1KM范围为KML格式,在Google Earth中打开1KM范围,这时重新查看1KM范围中最高点和最低点高程,并且标定出来。看是否与原本范围最高点高程差值大不大,一般情况下,两者的差值不会太大,如果1KM范围最高点高程低于原本测区最高点高程就万事OK了,但如果高了,就要考虑飞机飞行的安全范围了,一般情况下,飞机的相对航高要高于测区(原测区—1KM测区)200m,因为GPS导航情况下,误差会存在50—100m左右,所以相对航高至少要在200以上,200m也称为安全飞行航高,具体的航高要在航高计算表中计算,计算方法见下述四。
四、根据甲方所要求的飞行精度(比例尺),一般1:500,1:1000,1:2000;利用航高精度计算表,表格如下: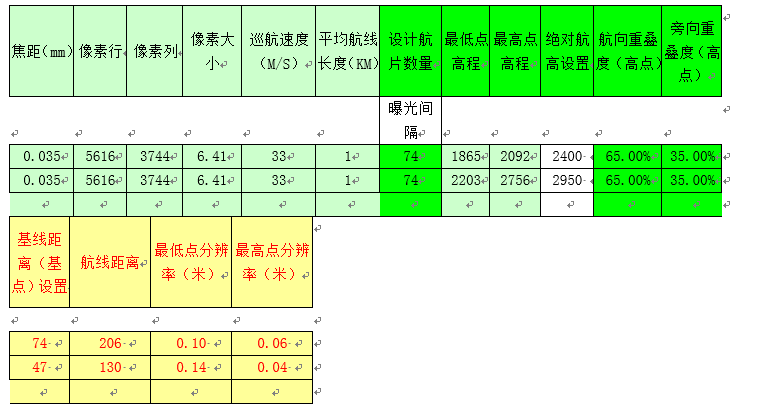
输入摄区最高点、最低点高程数据,按照要求比例尺,输入绝对航高计算最低点和最高点分辨率,一般情况下最低点的分辨率容易满足要求精度,最高点的分辨率不容易满足要求,可以适当放宽0.0几个像素,这时可以粗略的计算出平均航高,用绝对航高—平均航高=相对航高,也就是飞机的飞行高度。
五、此时要精确的计算测区相对航高和曝光点的位置以及各种参数就要运行SWDC数字航摄仪中“航线设计,Aroute—untitled”软件,把原始测区边界的KML文件转换成BL文件,然后编辑成:
“测区边界1”
“101.7480514505752 36.65337381960704”…
格式,导入到航线软件中,对于不同的地区,首先要在Aroute—untitled软件中设置大于边界区域经纬度,即左上角和右上角,对于经纬度要在Google Earth 中查询,如下导入摄区边界: 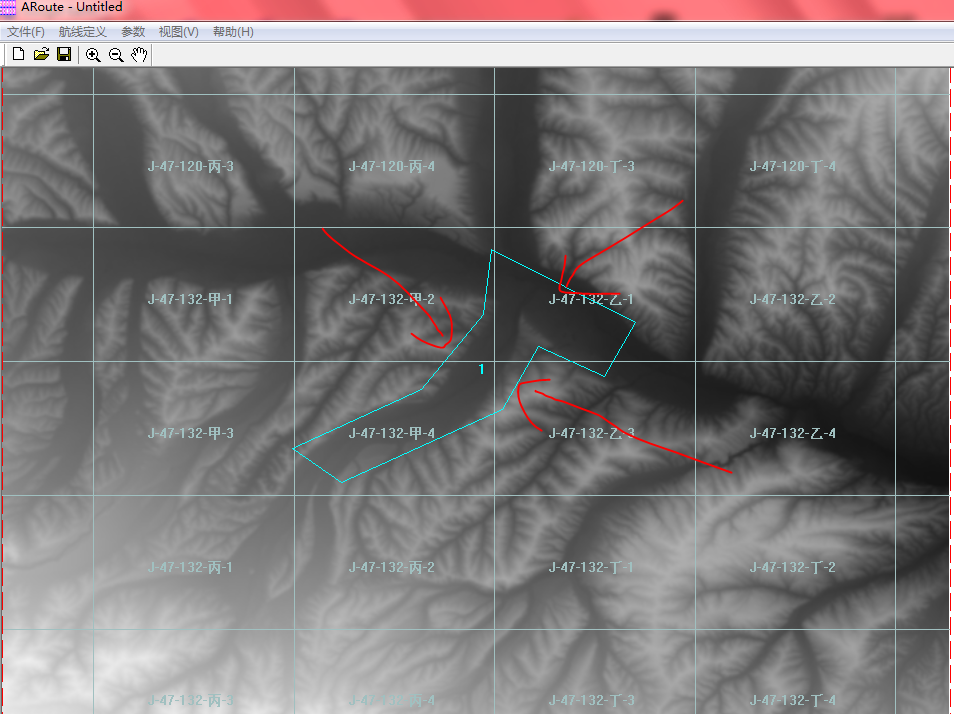 在规划航线之前首先要在软件中查询最高点、最低点和平均高程,如下:
在规划航线之前首先要在软件中查询最高点、最低点和平均高程,如下:
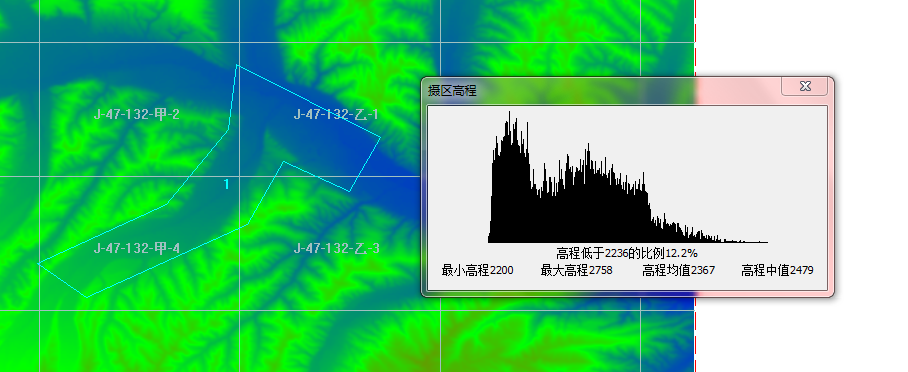 这时可对照航线计算表中计算的结果,看相差是否太大,如果不大则要八高程均值填入计算表中,原计算表中的高程均值作废,此时就可以计算出相对飞行高度,用绝对高程—高程均值=飞行高度。然后在软件中根据航向与旁向重叠度,以及像副大小计算曝光点位以及曝光间隔和相邻航带之间的距离,计算如下所示:
这时可对照航线计算表中计算的结果,看相差是否太大,如果不大则要八高程均值填入计算表中,原计算表中的高程均值作废,此时就可以计算出相对飞行高度,用绝对高程—高程均值=飞行高度。然后在软件中根据航向与旁向重叠度,以及像副大小计算曝光点位以及曝光间隔和相邻航带之间的距离,计算如下所示: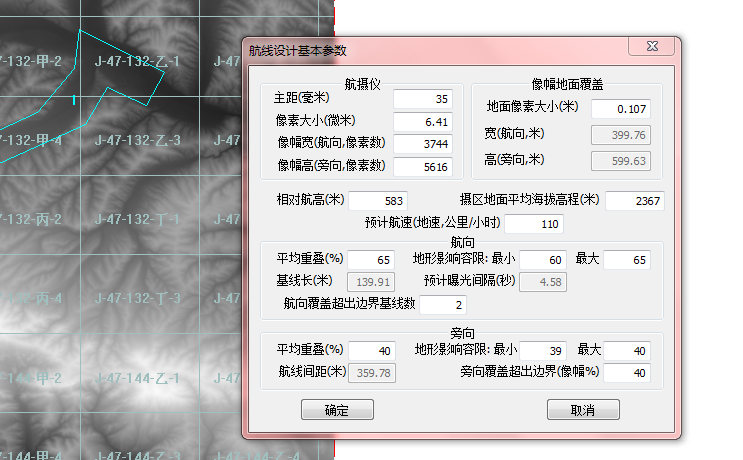 此表所示相机及航带,航向、旁向、重叠度各种参数都在上面,每次飞行时要根据不同的相机参数及摄区地形的不同重新设置。
此表所示相机及航带,航向、旁向、重叠度各种参数都在上面,每次飞行时要根据不同的相机参数及摄区地形的不同重新设置。
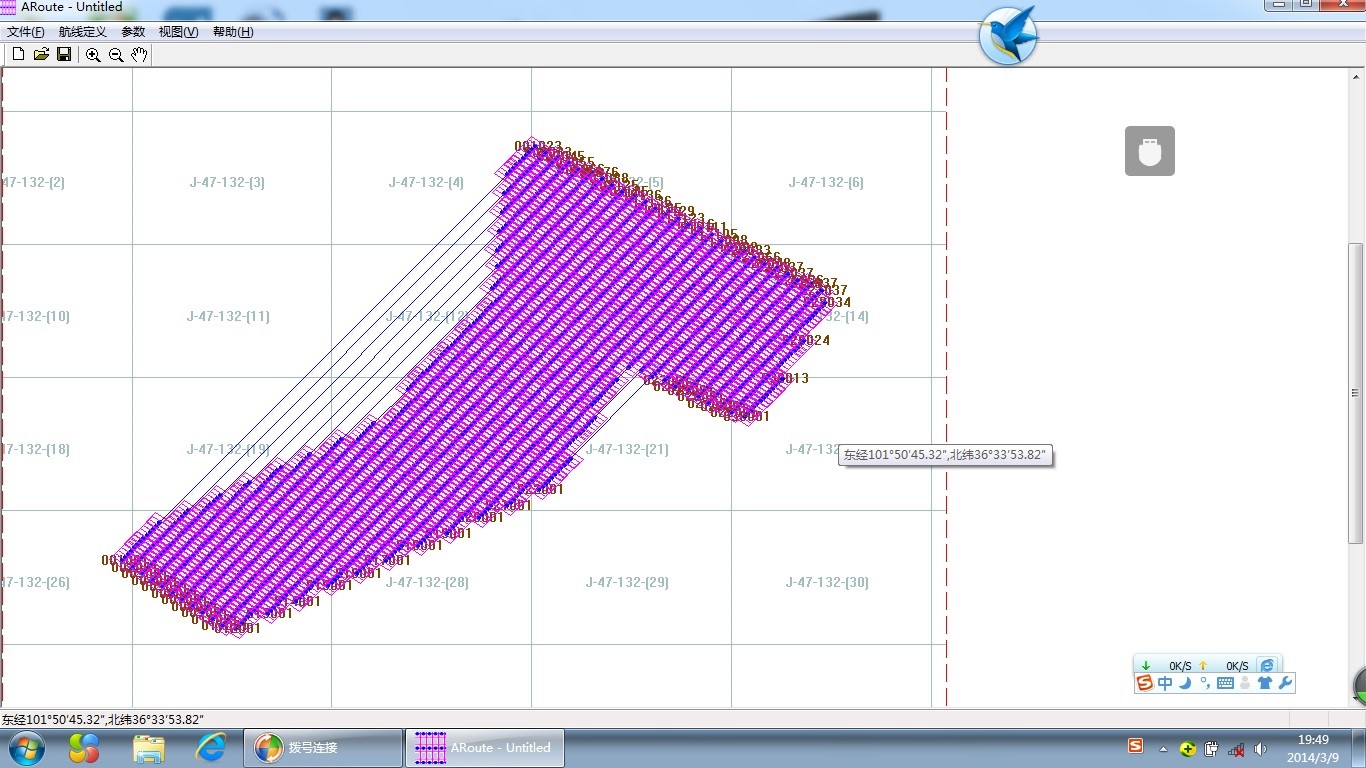
生成航带,计算曝光点,生成的曝光点格式为EPS:
 此时生成的曝光点文件中是各曝光点的WDS84坐标,为了确保期间,将他们导入到GoogleEarth中进行检查与验证,导入GoogleEarth的文件格式为KML,此时要将eps文件进行编辑,删除多余的字符,然后再导入到excel中修改格式,最终只保留经纬度成TXT文件(经度在前,纬度在后),用软件将编辑好的经纬度(按度表示),导入软件保存生产KML文件,然后导入到GoogleEarth中查看点位。
此时生成的曝光点文件中是各曝光点的WDS84坐标,为了确保期间,将他们导入到GoogleEarth中进行检查与验证,导入GoogleEarth的文件格式为KML,此时要将eps文件进行编辑,删除多余的字符,然后再导入到excel中修改格式,最终只保留经纬度成TXT文件(经度在前,纬度在后),用软件将编辑好的经纬度(按度表示),导入软件保存生产KML文件,然后导入到GoogleEarth中查看点位。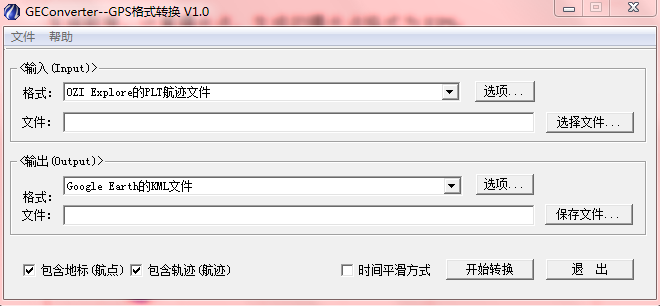 如下导入点位图正确且分布如下:
如下导入点位图正确且分布如下:
 六:接下来,要做的就是根据曝光点位画出航线,具体操作步骤是把保存成的曝光点txt文件转换成的KML文件反投影到高斯克呂格投影带上,
六:接下来,要做的就是根据曝光点位画出航线,具体操作步骤是把保存成的曝光点txt文件转换成的KML文件反投影到高斯克呂格投影带上, 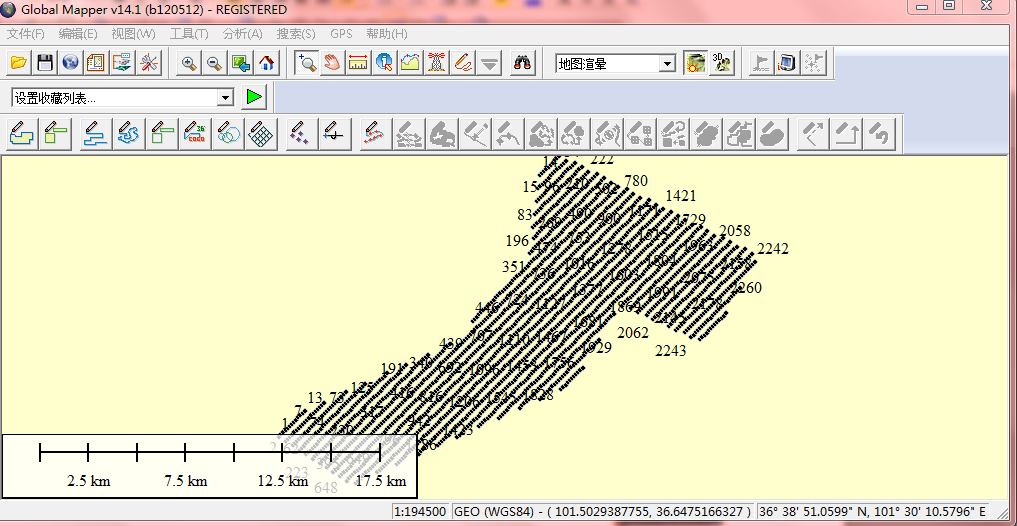 然后把生成的DWG文件,用cass打开,按照点位勾画出航线边界范围,画好后如下所示:
然后把生成的DWG文件,用cass打开,按照点位勾画出航线边界范围,画好后如下所示: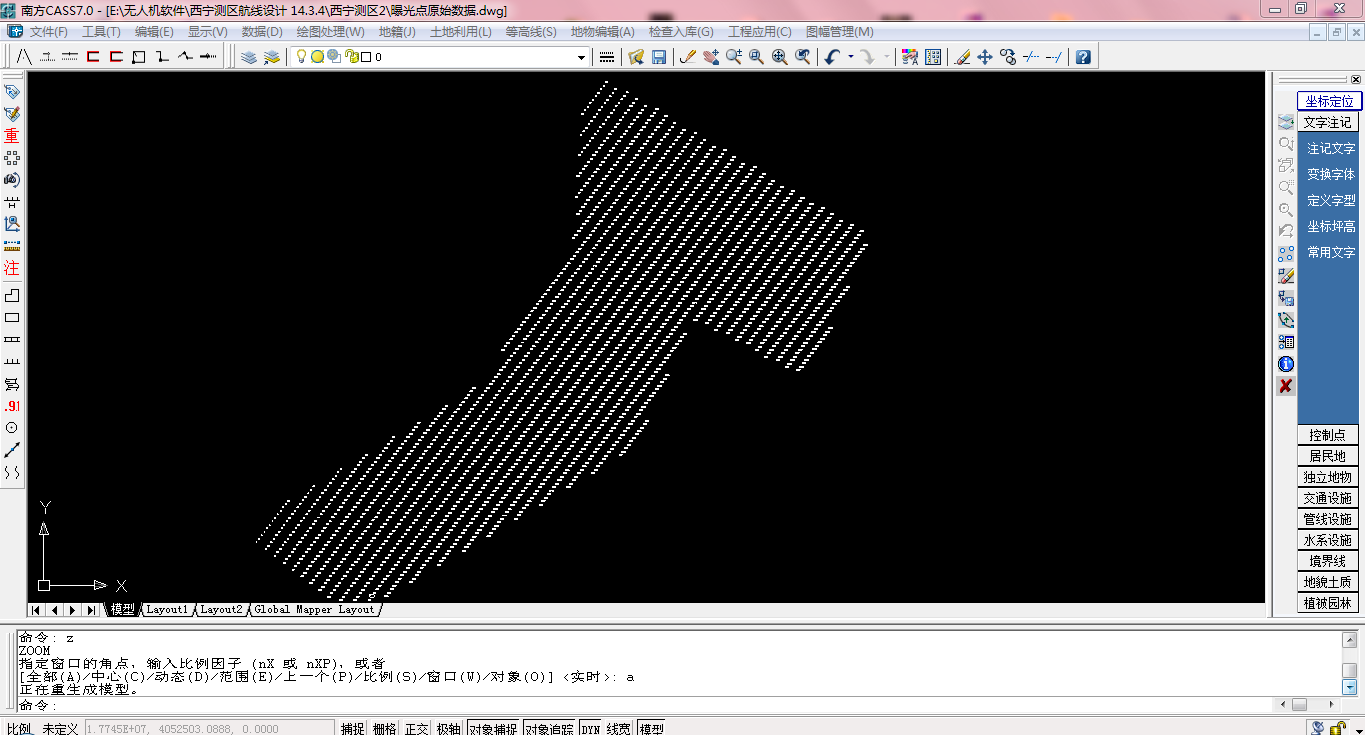 进行航线编辑:
进行航线编辑: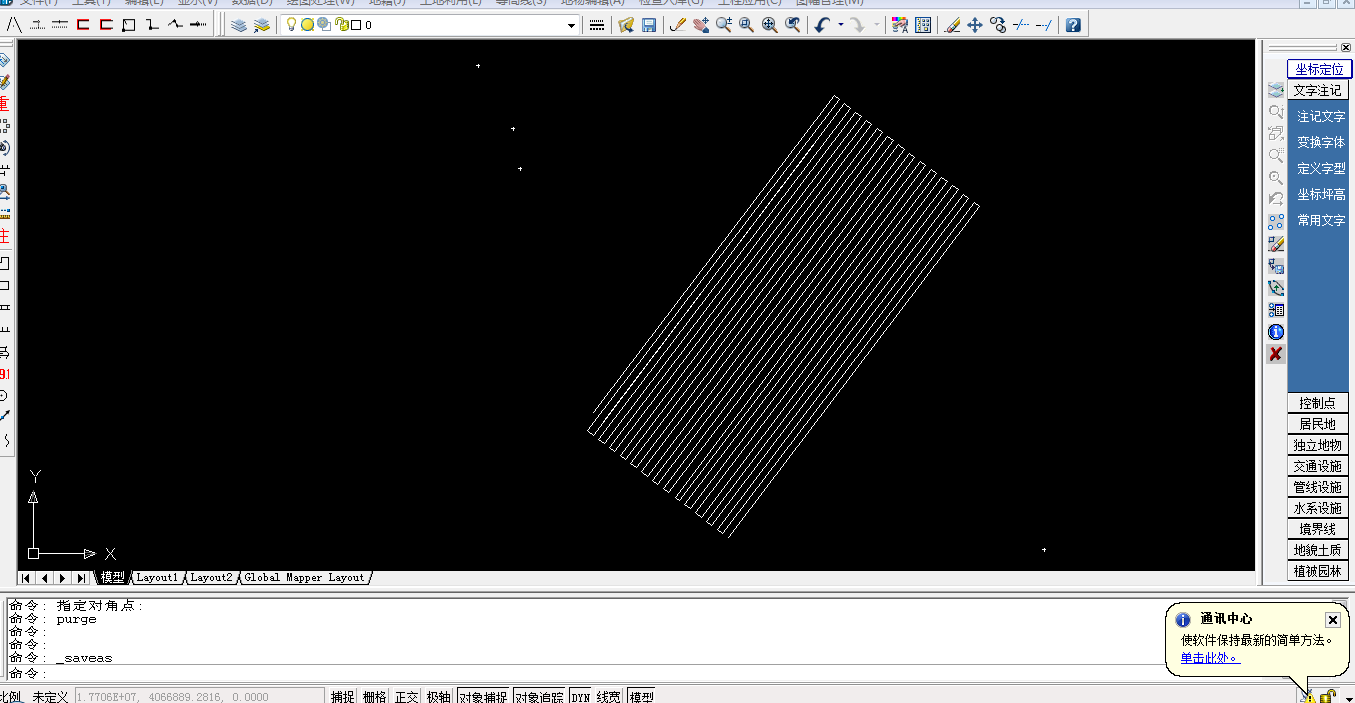 然后再转换成KML文件,转出后如下,输出矢量格式:
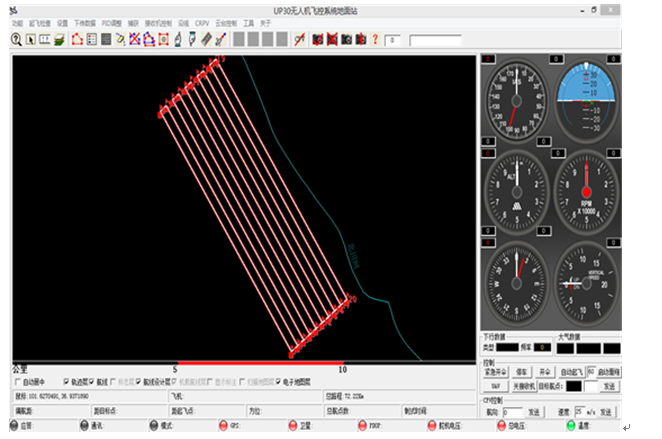
然后再转换成KML文件,转出后如下,输出矢量格式: 再把航线kml 导入到谷歌地球中:
再把航线kml 导入到谷歌地球中: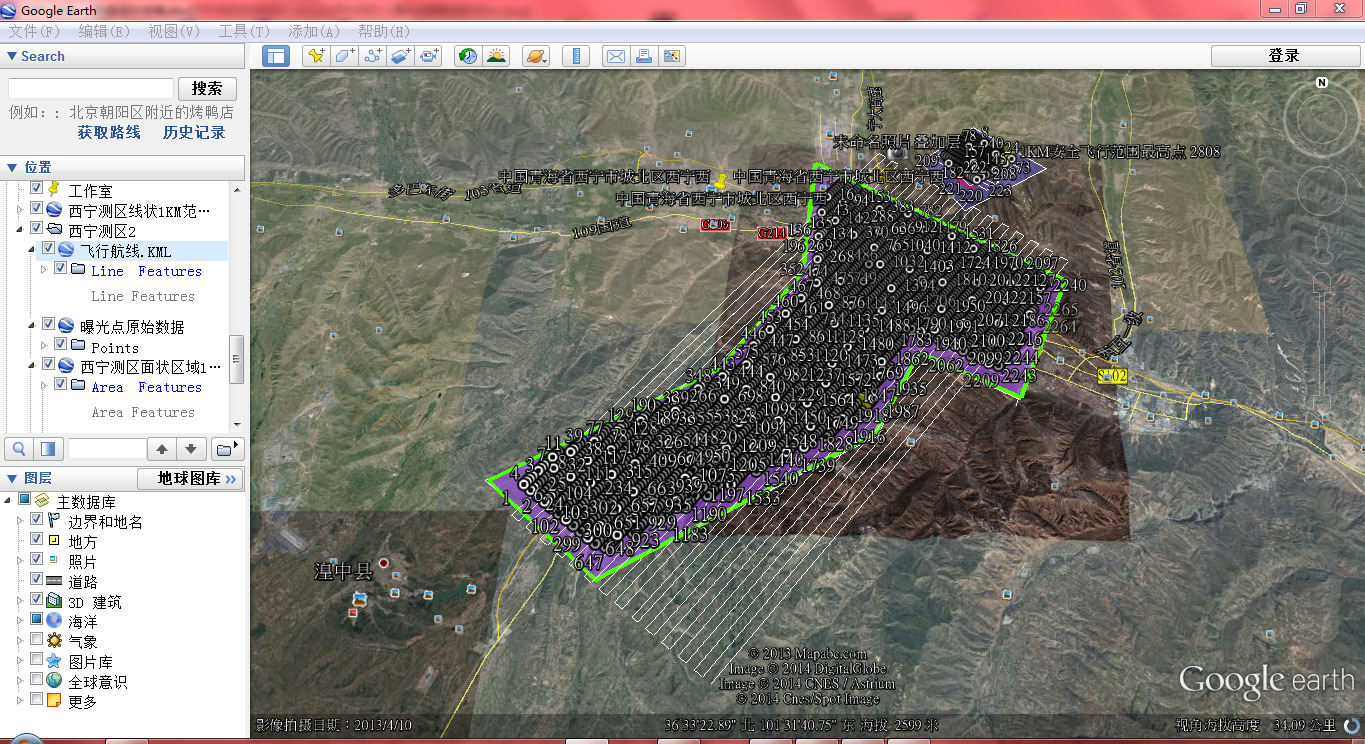
此时,航线与曝光点信息全部包含在里面了,接下来就是要把航线信息和曝光点信息导入到 up30 飞控中,上传至飞控,让飞控自主飞行了。
6)待航点数据、曝光点数据检查无误后,即可把航点数据和曝光点数据导入到UP30飞控中,选择定点曝光模式,上传并下载验证所上传航点曝光点数据是否正确,完成此步骤后在飞控中设置的项目包括:空速、陀螺、地面海拔高、GPS巡航速度、发动机怠速、大车小车转速、飞行俯仰、横滚角等。完成这一系列检查后即可进行飞行作业,获取测区数码影像。航点、曝光点数据导入UP30飞控地面站,UP30型无人机飞控系统是一个高性能无人机控制系统,也是目前国内应用最为广泛的飞行控制系统,它主要由3轴EMS加速度计、速度陀螺、气压高度计、空速传感器、单点定位GPS,地面站软件和数传通讯设备组成。对飞控可以进行飞行速度、飞行高度的设定,可以稳定控制各种布局的无人驾驶飞机。飞机起飞后即可关闭遥控器或手动切入自动驾驶模式进入自动导航,在地面站上可以对飞机进行飞行航线设置,并可以在飞行中实时修改飞行航点和更改飞行目标点:
最后
以上就是害怕鸵鸟最近收集整理的关于基于UP30飞控系统的无人机地面站航线规划方法的全部内容,更多相关基于UP30飞控系统内容请搜索靠谱客的其他文章。








发表评论 取消回复