我是靠谱客的博主 仁爱音响,这篇文章主要介绍SaD-SLAM: A Visual SLAM Based on Semantic and Depth Information,现在分享给大家,希望可以做个参考。
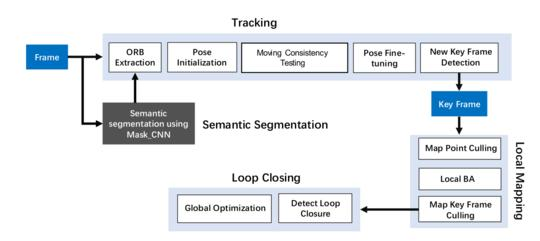
针对目前大多数的SLAM系统都是面向静态环境的,在动态环境中表现都很差的问题。本文提出了SaD-SLAM,这个系统基于ORB-SLAM2,能在动态场景下达到不错的效果。根据语义分割和深度信息,我们很容易可以找到那些落在动态物体的特征点,同时也检测保存的特征是不是还在继续跟踪。为了使系统在动态场景中更加鲁棒和准确,我们同时用静态的特征点和动态的特征点来计算相机位姿。这个算法在TUM数据集上进行了测试并达到了不错的效果。
最后
以上就是仁爱音响最近收集整理的关于SaD-SLAM: A Visual SLAM Based on Semantic and Depth Information的全部内容,更多相关SaD-SLAM:内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复