1.eigen3相关程序编译不通过,显示找不到eigen3头文件,使用软连接sudo ln -s /usr/include/eigen3/Eigen /usr/include/Eigen链接到eign3头文件,编译时若依然未通过,则在cmake中加入eigen3绝对路径。若编译报错但通过,则不用理会。
矩阵变换实验:
2.显示相机位姿实验找不到相机运动轨迹,因为观察外边的目录结构,就发现这个txt文件是存在examples下面的,但是执行的时候,是在examples/build下执行的。所以要先… 退出build 再 … 退出examples 然后/examples/trajectory.txt
来源:
https://blog.csdn.net/Evanzxh/article/details/119299194?ops_request_misc=%257B%2522request%255Fid%2522%253A%2522164257894616780261965741%2522%252C%2522scm%2522%253A%252220140713.130102334.pc%255Fall.%2522%257D&request_id=164257894616780261965741&biz_id=0&utm_medium=distribute.pc_search_result.none-task-blog-2~all~first_rank_ecpm_v1~rank_v31_ecpm-4-119299194.pc_search_result_cache&utm_term=visualizeGeometry

Ubuntu20/视觉SLAM十四讲踩坑记录_Dr_Zobot的博客-CSDN博客
3.sophus库引用时找不到头文件。sophus版本问题。老版本sophus是非模板类的Sophus。最新sophus为模板类的Sophus,代码会有点变化。首先需要指定c++版本为c++=14,而/usr/include中不包含h格式的头文件,需要将库文件格式改为hpp
4.提示找不到opencv,此时查看opencv版本及include文件夹,发现opencv环境存在,故添加cmakelist软连接include_directories( ${OpenCV-INCLUDE_DIRS})target_link_libraries(imageBasics ${OpenCV_LIBS})
https://blog.csdn.net/weixin_53660567/article/details/120942158
5.sterovision左右目地图合成为一个地图时报错,更改cmakelist后依然不能编译,此时在ch5根目录下进行编译,编译通过,但显示核心已抛弃。
查阅网上资料后发现是图片位置错误。将图片复制到build/stero文件下可以正常运行。
来源:https://blog.csdn.net/weixin_53660567/article/details/120942158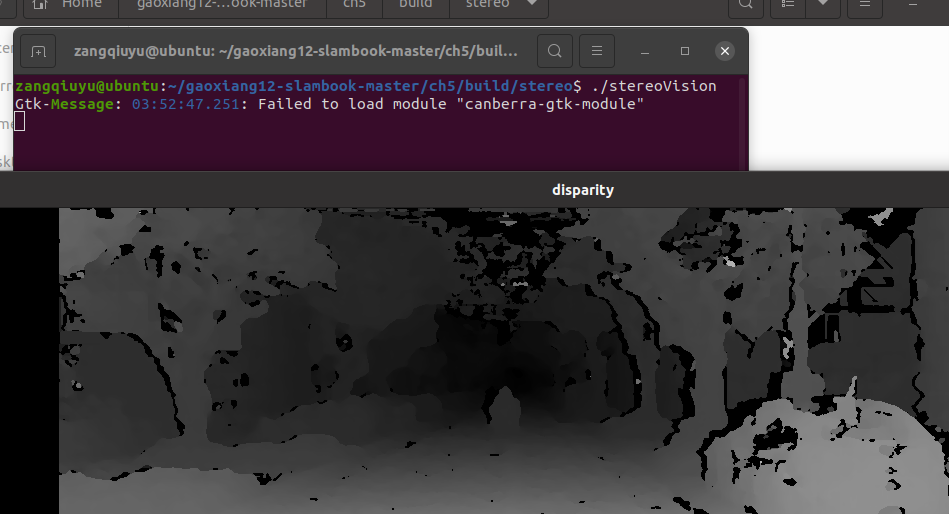
6.RGBD共有点云实验编译时报错,找不到opencv库,需要进行软连接。程序可以运行,但显示共有点云为0.在build文件夹下编译可以通过,但现实找不到位姿文件,在位姿文件目录下编译时报错。此时在build文件夹下编译,之后复制到位姿文件夹下运行,运行正常。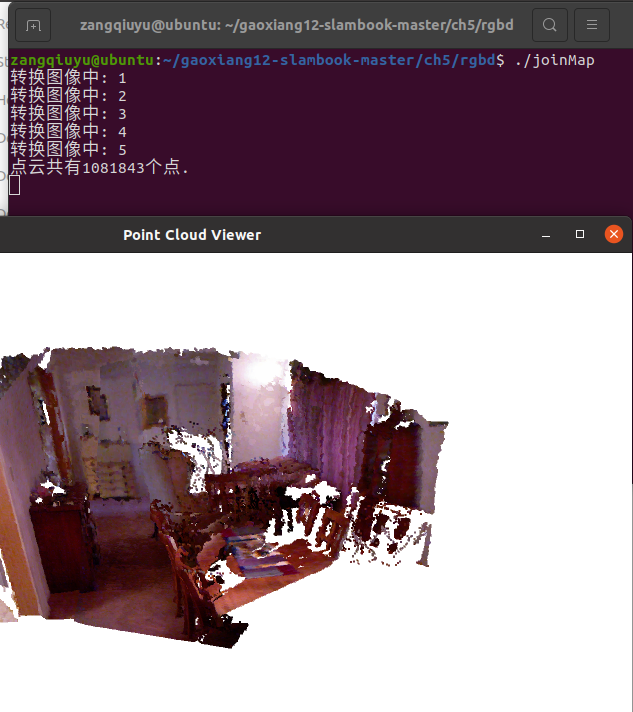
来源:https://blog.csdn.net/weixin_53660567/article/details/120942158
最后
以上就是多情香烟最近收集整理的关于vslam十四讲 ch5踩坑记录的全部内容,更多相关vslam十四讲内容请搜索靠谱客的其他文章。








发表评论 取消回复