三角测量(Triangulation)是视觉定位中,已知多个相机位置和空间中一点的投影点,进一步求该点3D位置的方法。三角测量是Pose Estimation的相反过程,求出相机位置后,图像中其它特征点的3D位置可以由这种方法一一求出。
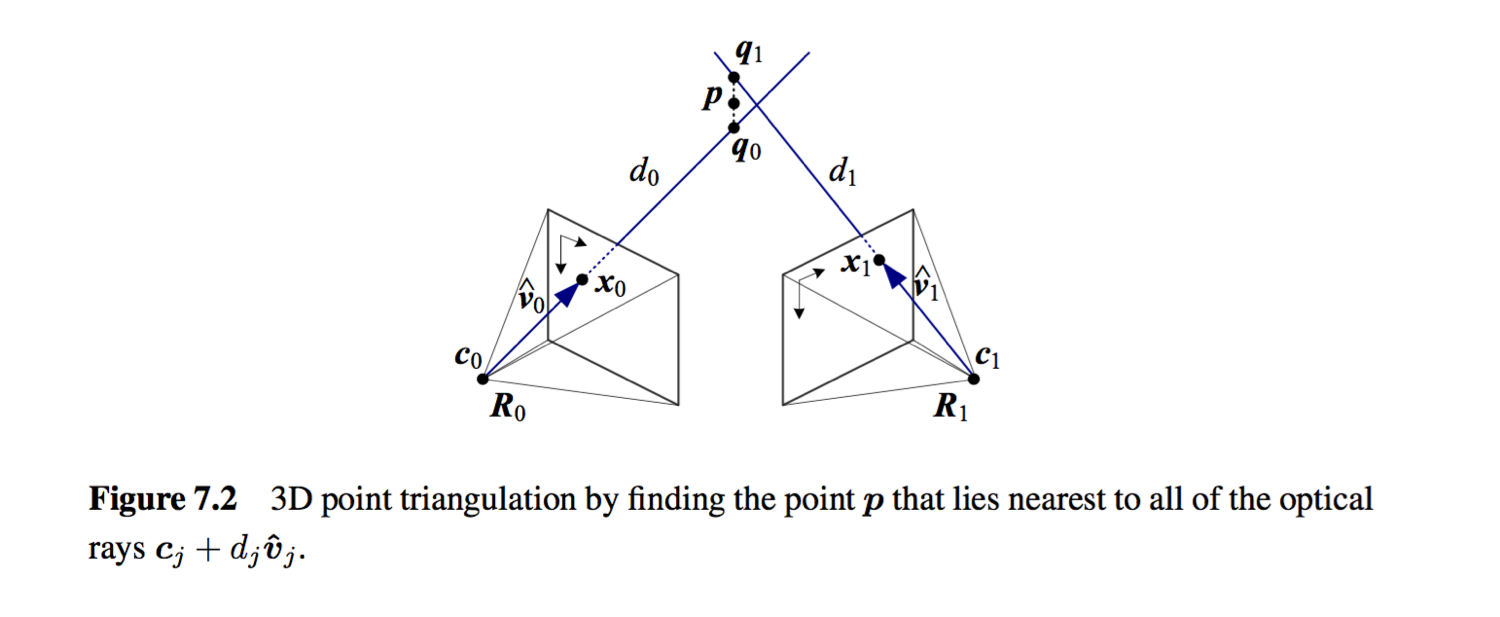
如图,已知R0,R1两台相机的信息和同一特征点p的投影点x0、x1,p的位置应该就是两条射线的交点。
而实际情况中,由于存在多台相机(多张不同位置拍摄的照片),所有射线往往并不恰好交于一点,此时需要写出误差公式,将目标问题表示为最小化误差的优化问题,用最小二乘法求出p的最优值。具体公式参见《Computer Vision: Algorithms and Applications》一书第七章。
转载于:https://www.cnblogs.com/clarenceliang/p/6709183.html
最后
以上就是有魅力夕阳最近收集整理的关于三角测量(Triangulation)的全部内容,更多相关三角测量(Triangulation)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复