激光雷达去畸变原理
相比较张楫博士激光雷达里程计开山之作的loam,它的去畸变原理是直接把eigen里面的球面插值方法进行了手动推理,但是loam就直接用了eigen库,相比较而言可能会降低一点点的速度,但是影响不大,代码又不那么复杂了
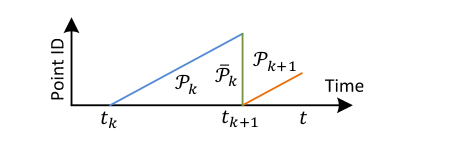
这块的本质简单,就好像论文里说的:我简化下,就是雷达在运动,打出的激光也是同一时间的打出返回,这样大家想想如果雷达不动,是不是点云的状态是很好的,但是雷达一动,点云肯能倾斜了,就不像面前的那个物体了,就是下图的Pk+1这样,我们要把它还原成pk一拔这个。于是就有了必须要去畸变的说法,再加上基本是10HZ-100HZ的激光雷达帧率。
就好像这个现象:如下照片
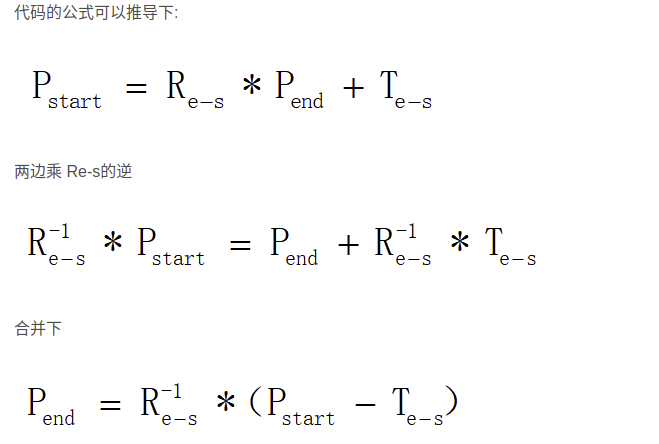
以下是代码实现
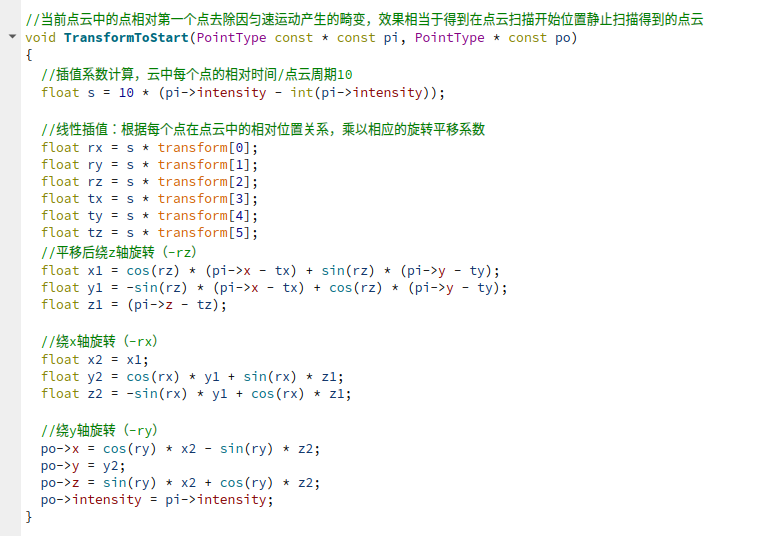
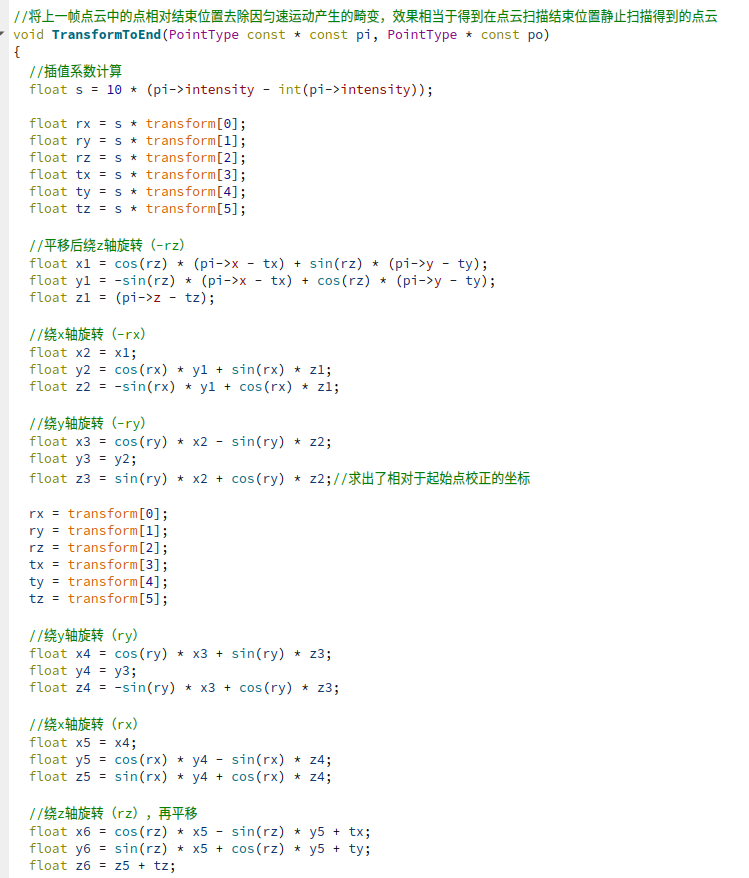
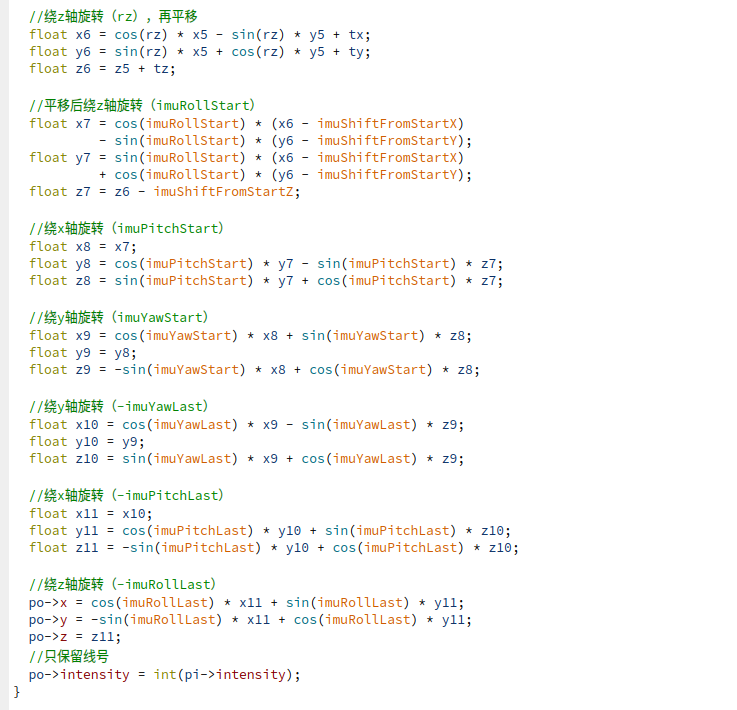
以上是 loam 张楫博士手推球面插值公式
// undistort lidar point
void TransformToStart(PointType const *const pi, PointType *const po)
{
//interpolation ratio
double s;
if (DISTORTION)
s = (pi->intensity - int(pi->intensity)) / SCAN_PERIOD;
else
s = 1.0;
//s = 1;
Eigen::Quaterniond q_point_last = Eigen::Quaterniond::Identity().slerp(s, q_last_curr);
Eigen::Vector3d t_point_last = s * t_last_curr;
Eigen::Vector3d point(pi->x, pi->y, pi->z);
Eigen::Vector3d un_point = q_point_last * point + t_point_last;
po->x = un_point.x();
po->y = un_point.y();
po->z = un_point.z();
po->intensity = pi->intensity;
}
// transform all lidar points to the start of the next frame
void TransformToEnd(PointType const *const pi, PointType *const po)
{
// undistort point first
pcl::PointXYZI un_point_tmp;
TransformToStart(pi, &un_point_tmp);
Eigen::Vector3d un_point(un_point_tmp.x, un_point_tmp.y, un_point_tmp.z);
Eigen::Vector3d point_end = q_last_curr.inverse() * (un_point - t_last_curr);
po->x = point_end.x();
po->y = point_end.y();
po->z = point_end.z();
//Remove distortion time info
po->intensity = int(pi->intensity);
}
以上是aloam 秦通博士的代码
代码的核心思路:
最后
以上就是飞快绿草最近收集整理的关于激光雷达去畸变原理的全部内容,更多相关激光雷达去畸变原理内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复