激光雷达运动畸变去除
主要内容

概念介绍
1 激光雷达传感器介绍
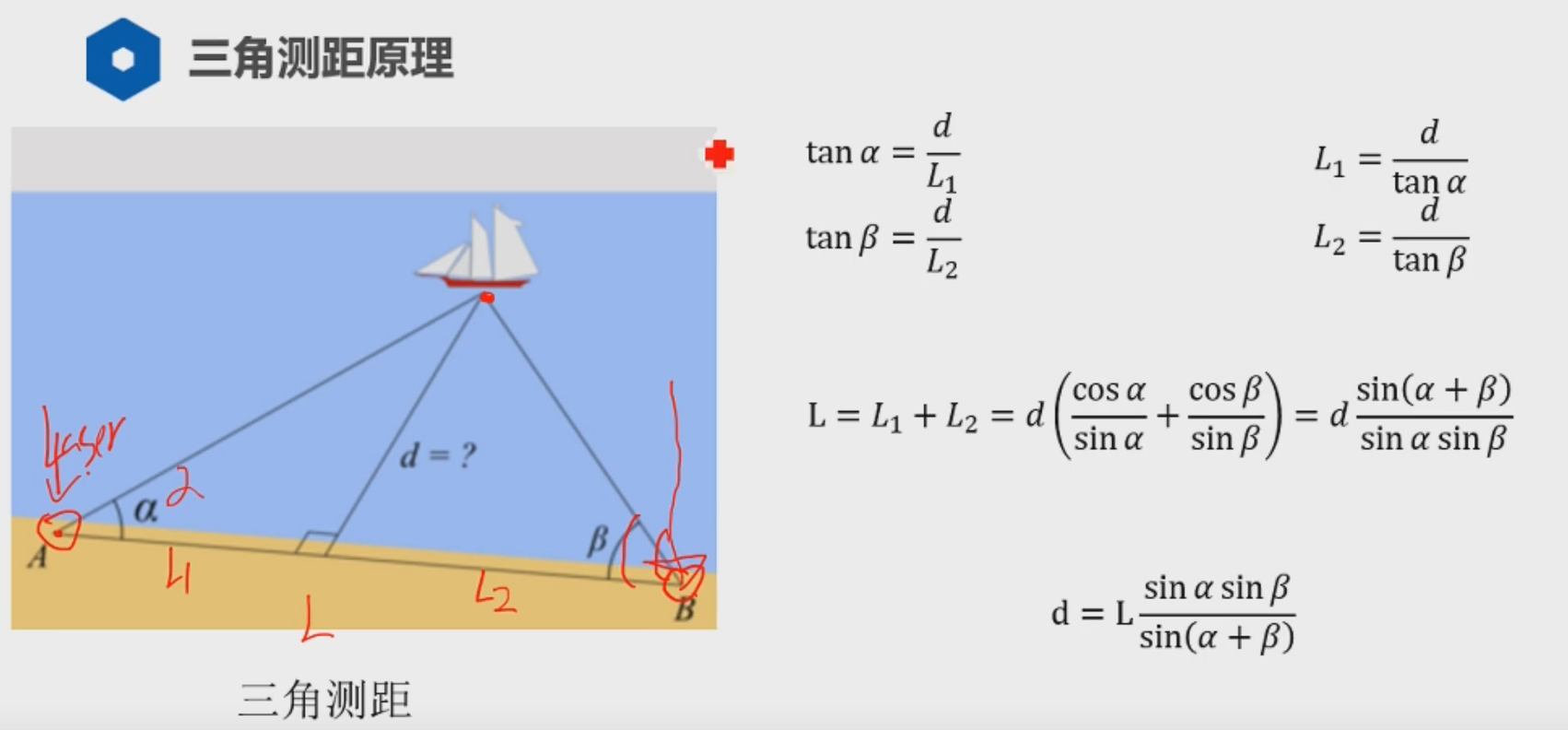
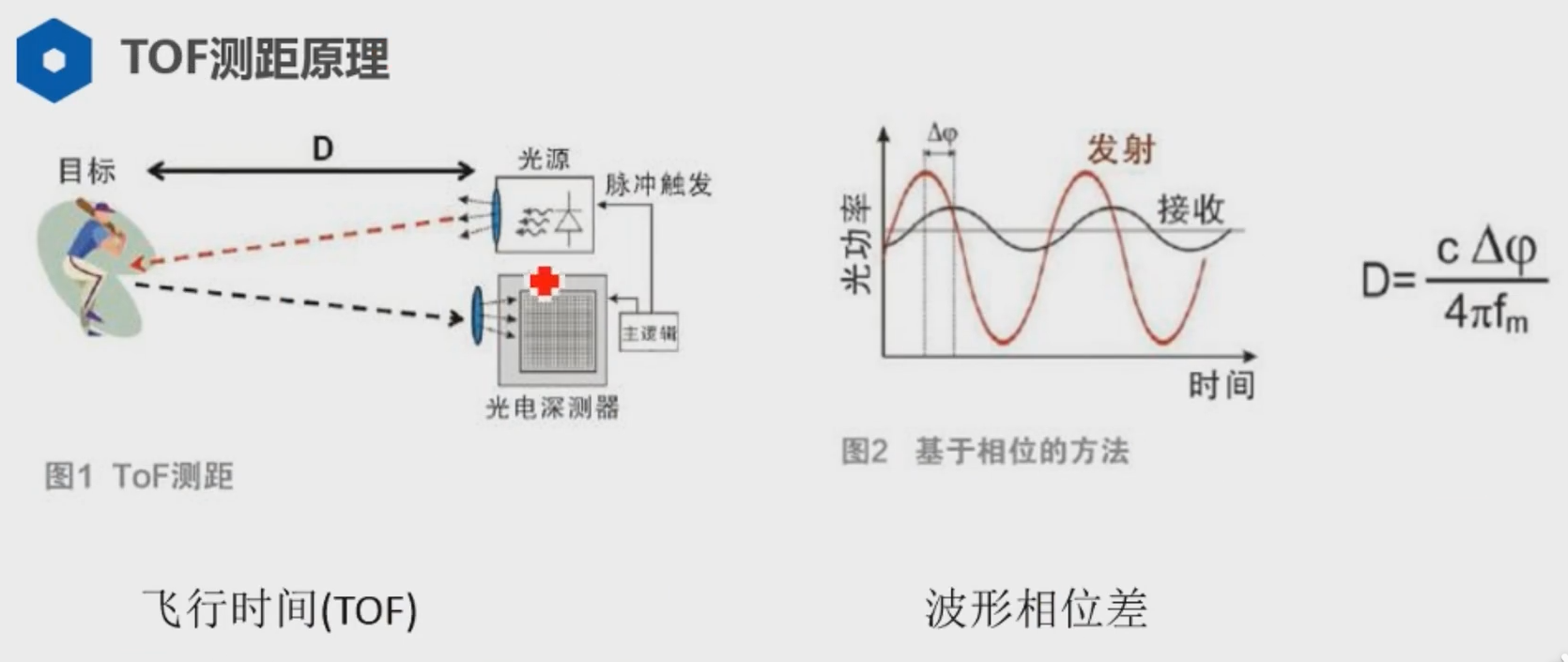
两种原理
- 三角测距:A2,EAI等等,10m内基本为三角测距原理
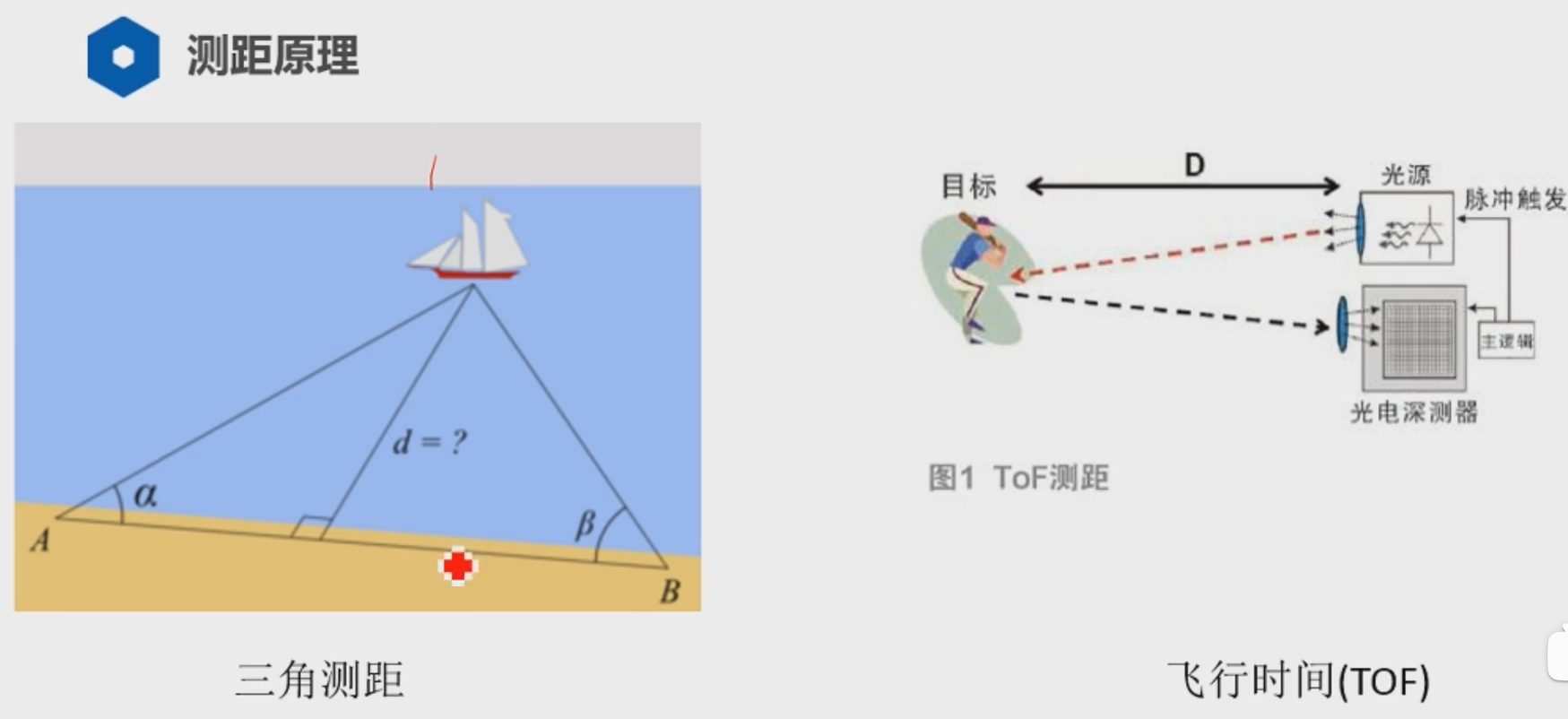

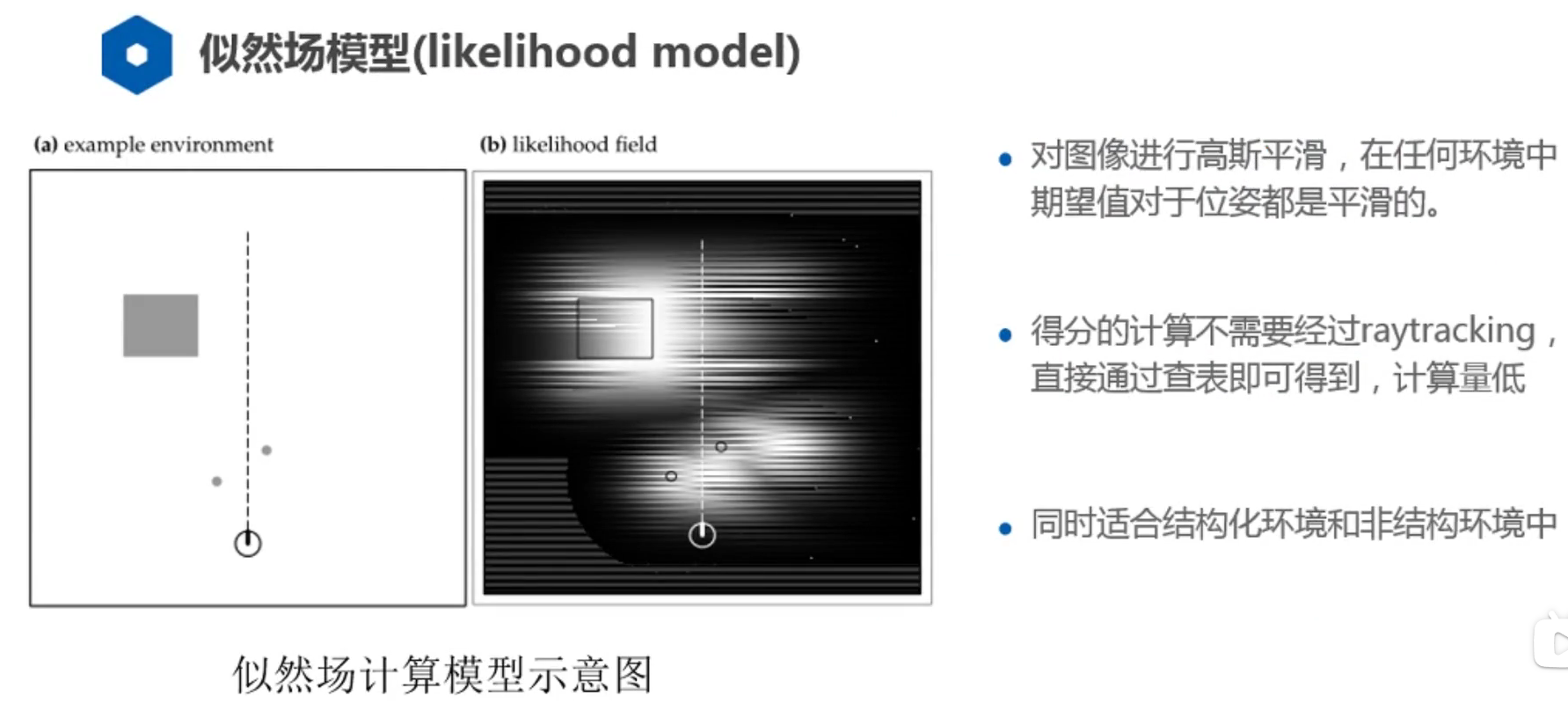
2 激光雷达数学模型介绍
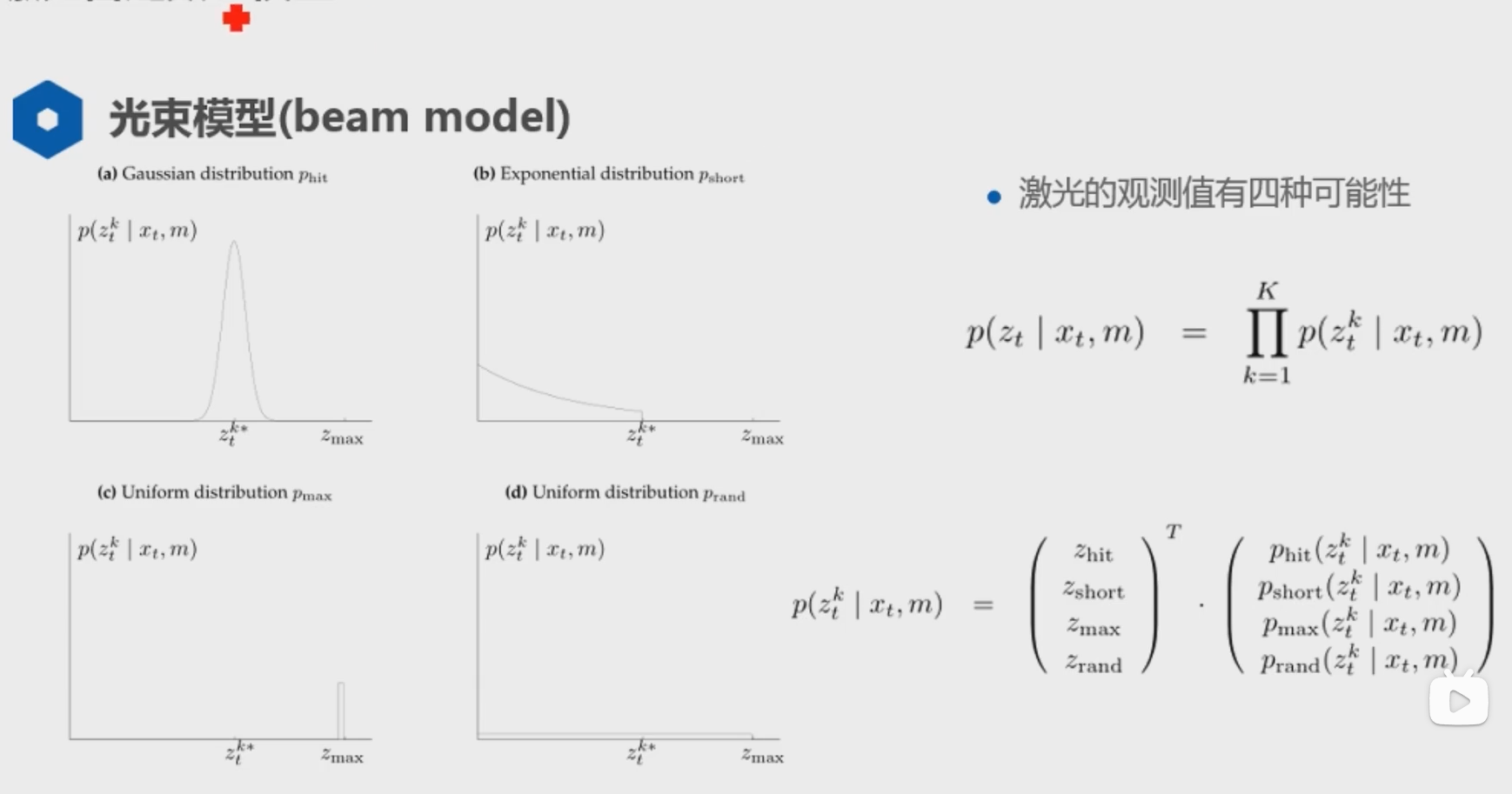
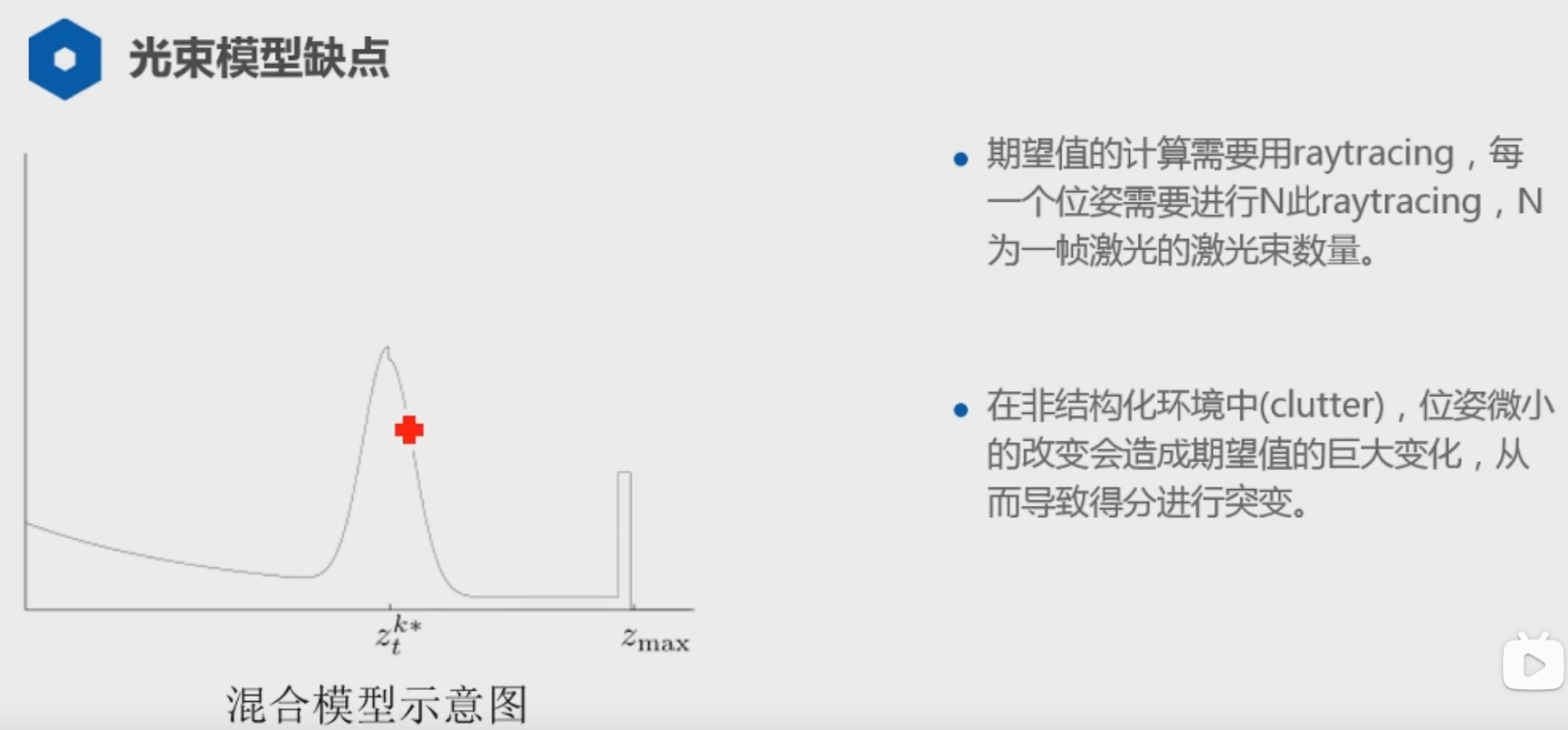
AMCL采用该模型
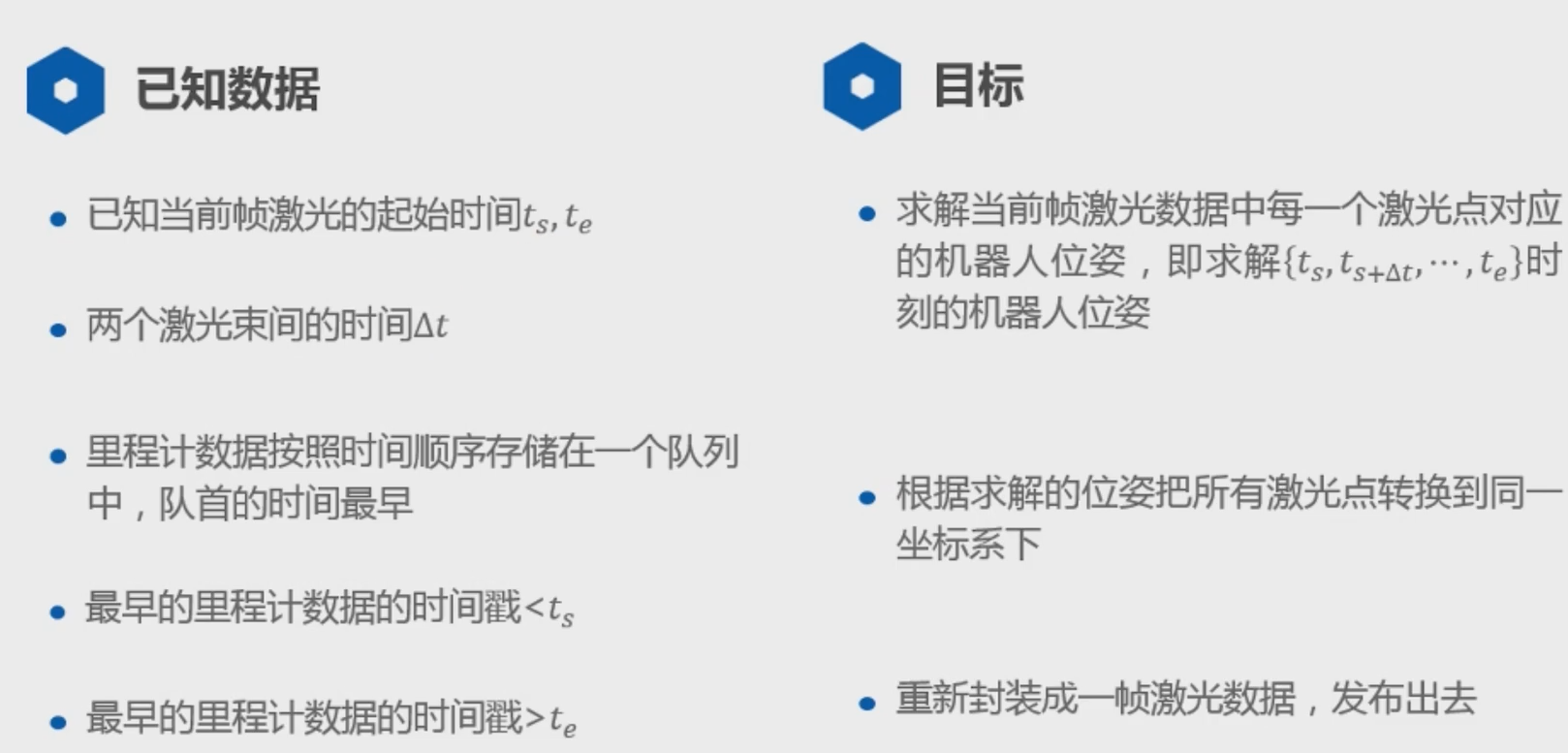
3 运动畸变的介绍
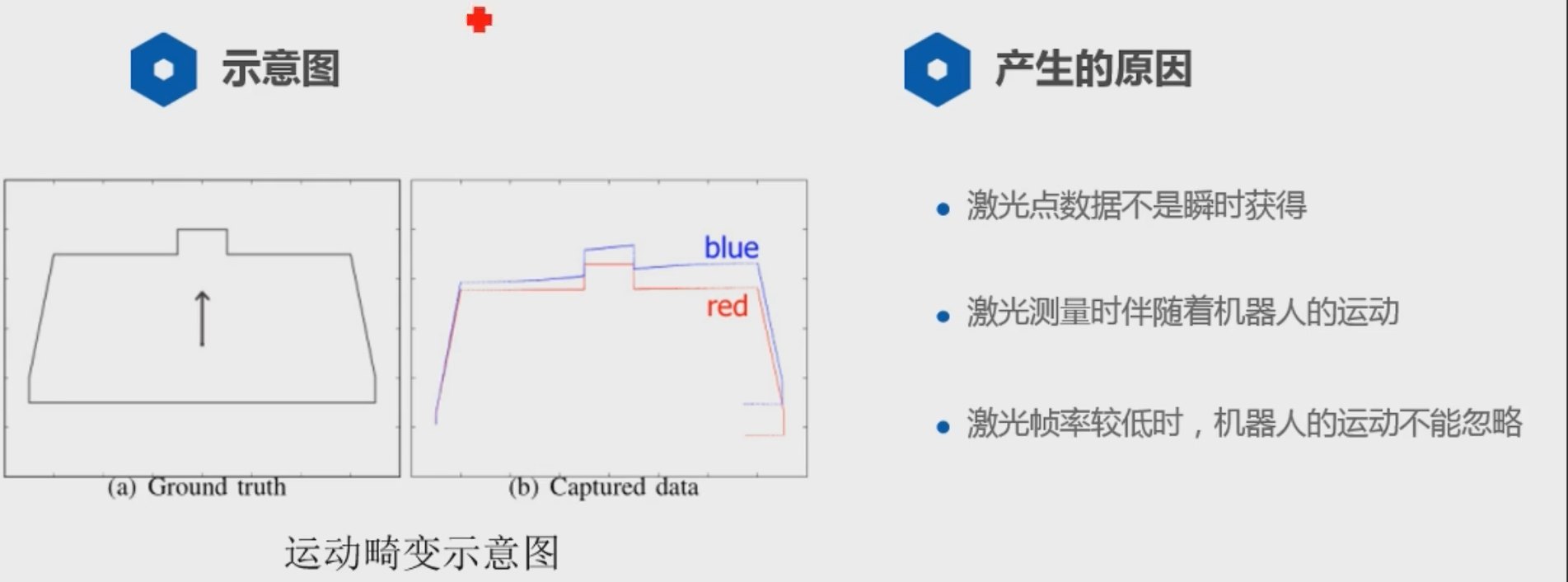
相比平移运动,旋转运动 产生的运动畸变比较严重
畸变去除
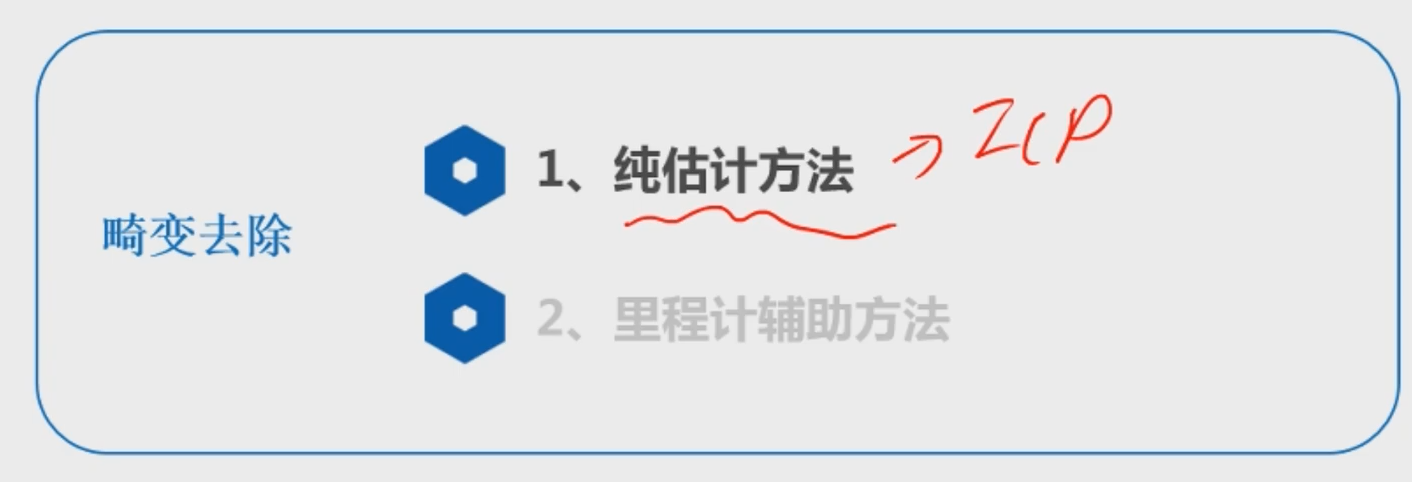
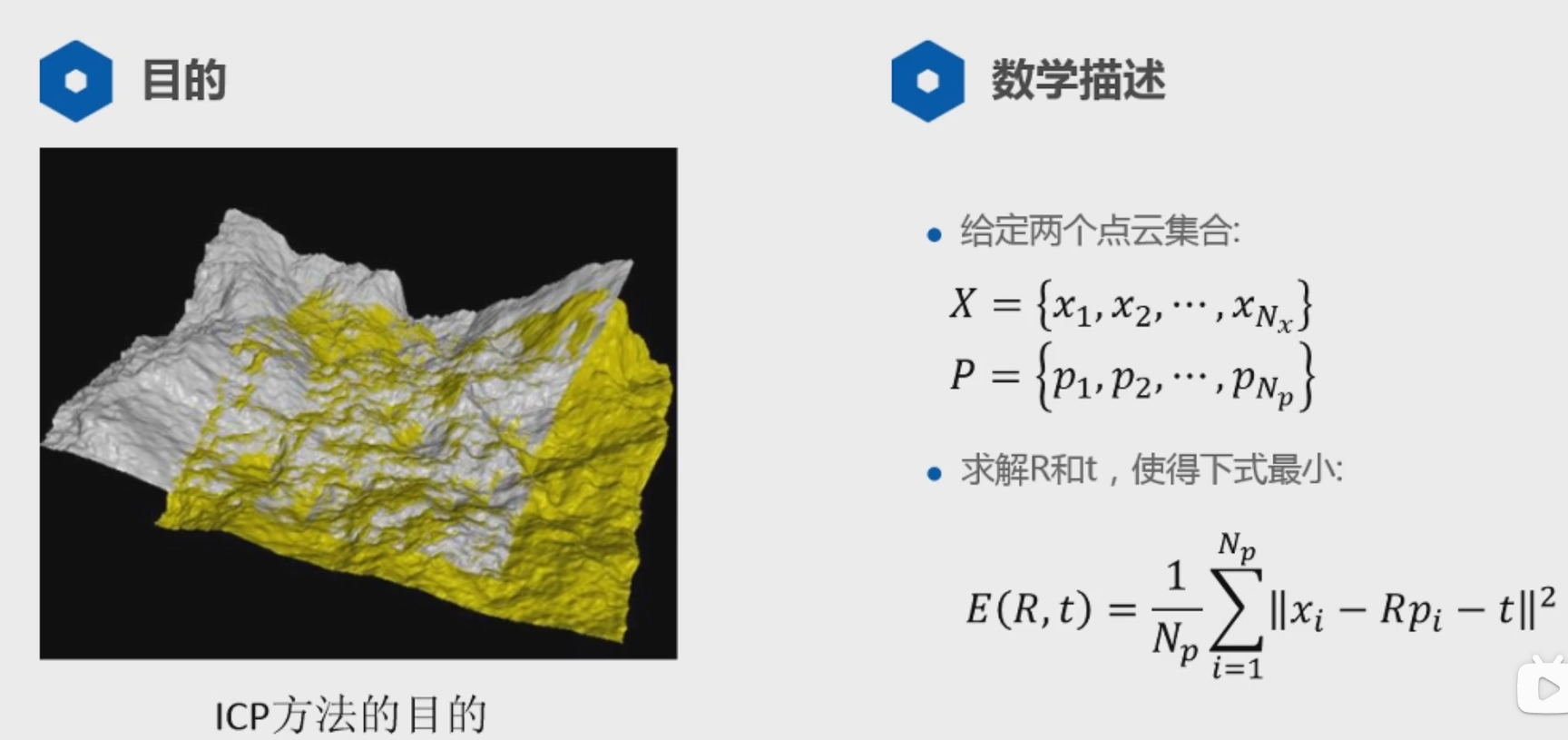
1 纯估计方法——ICP方法介绍
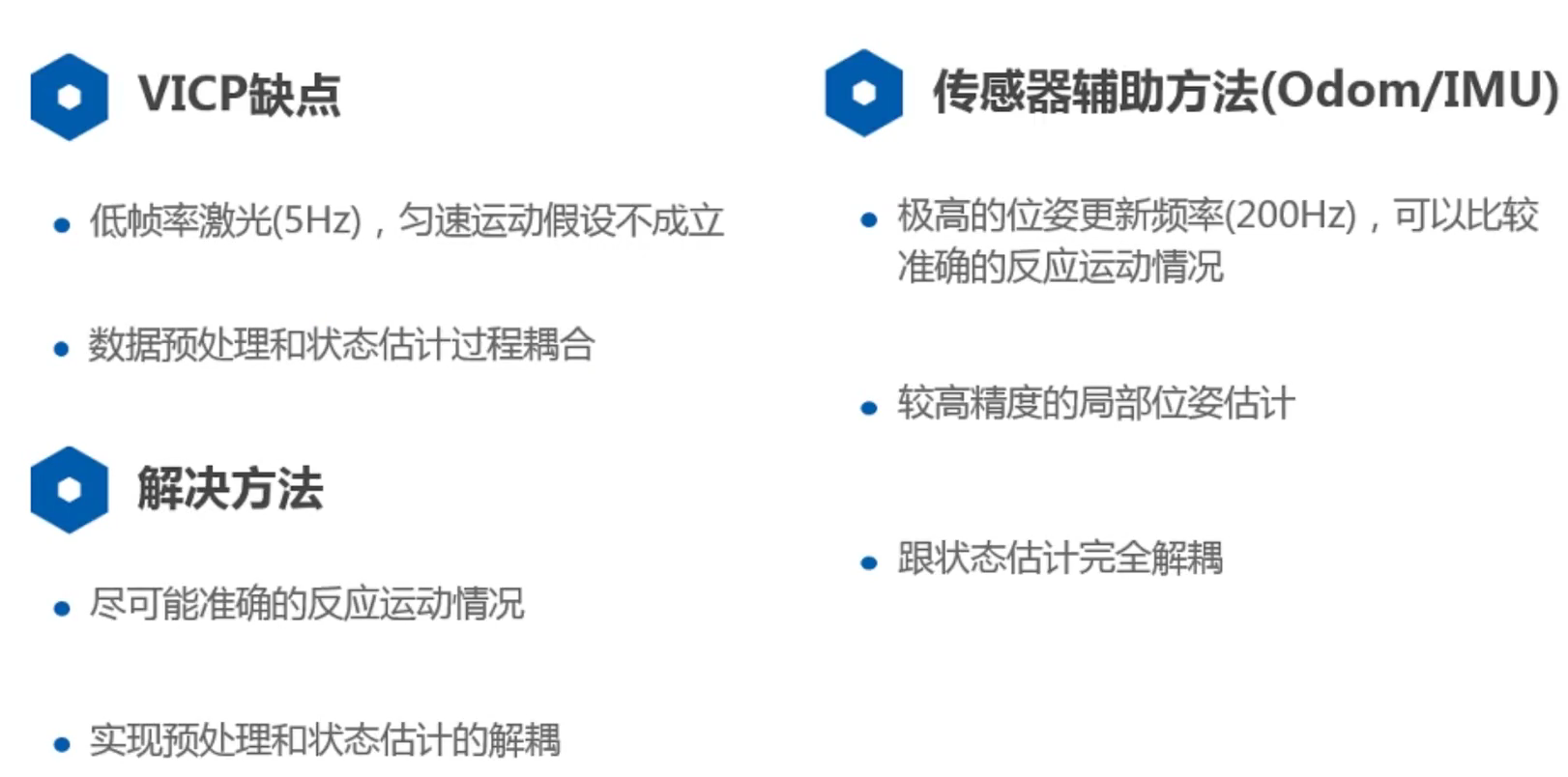
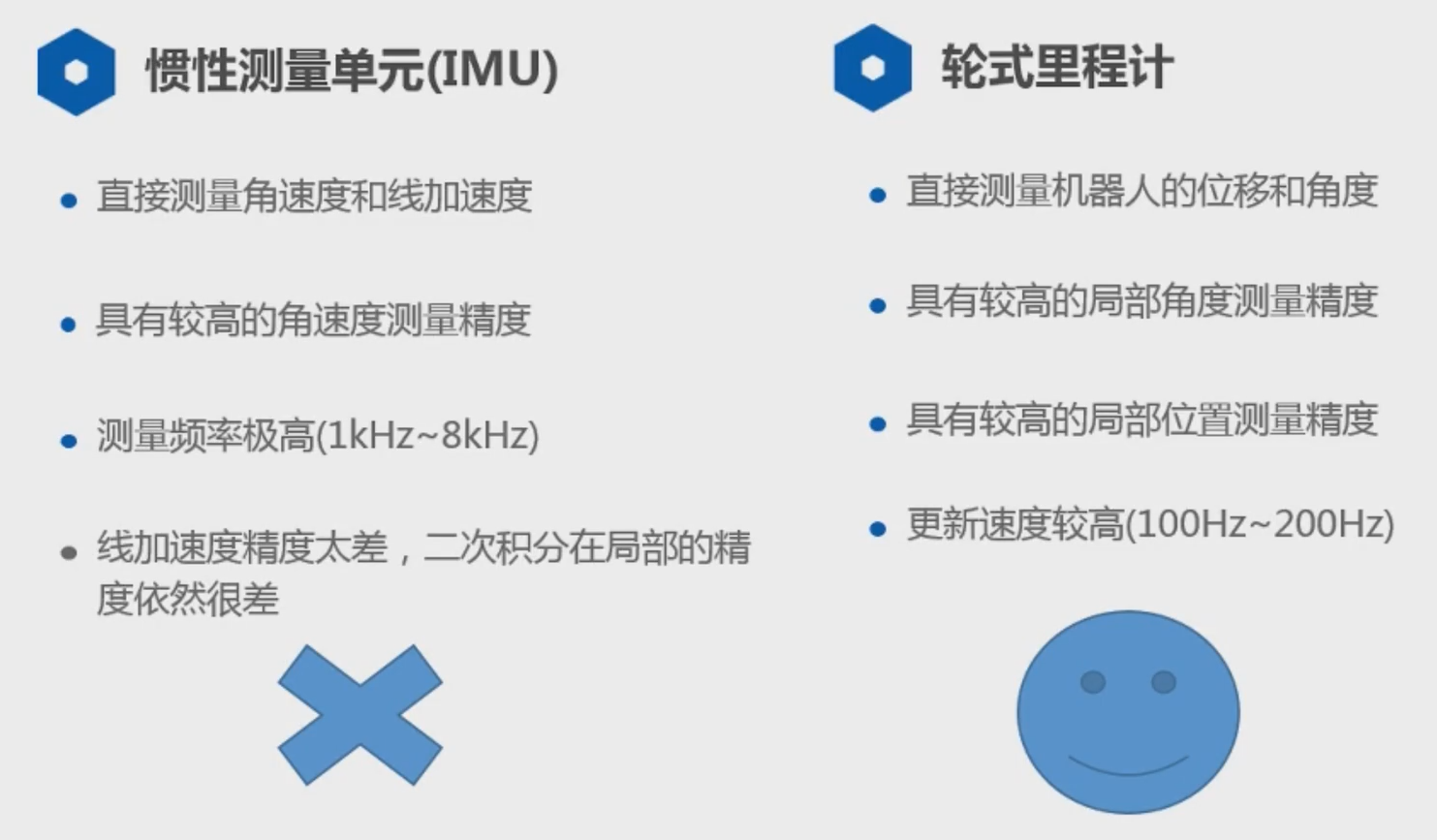
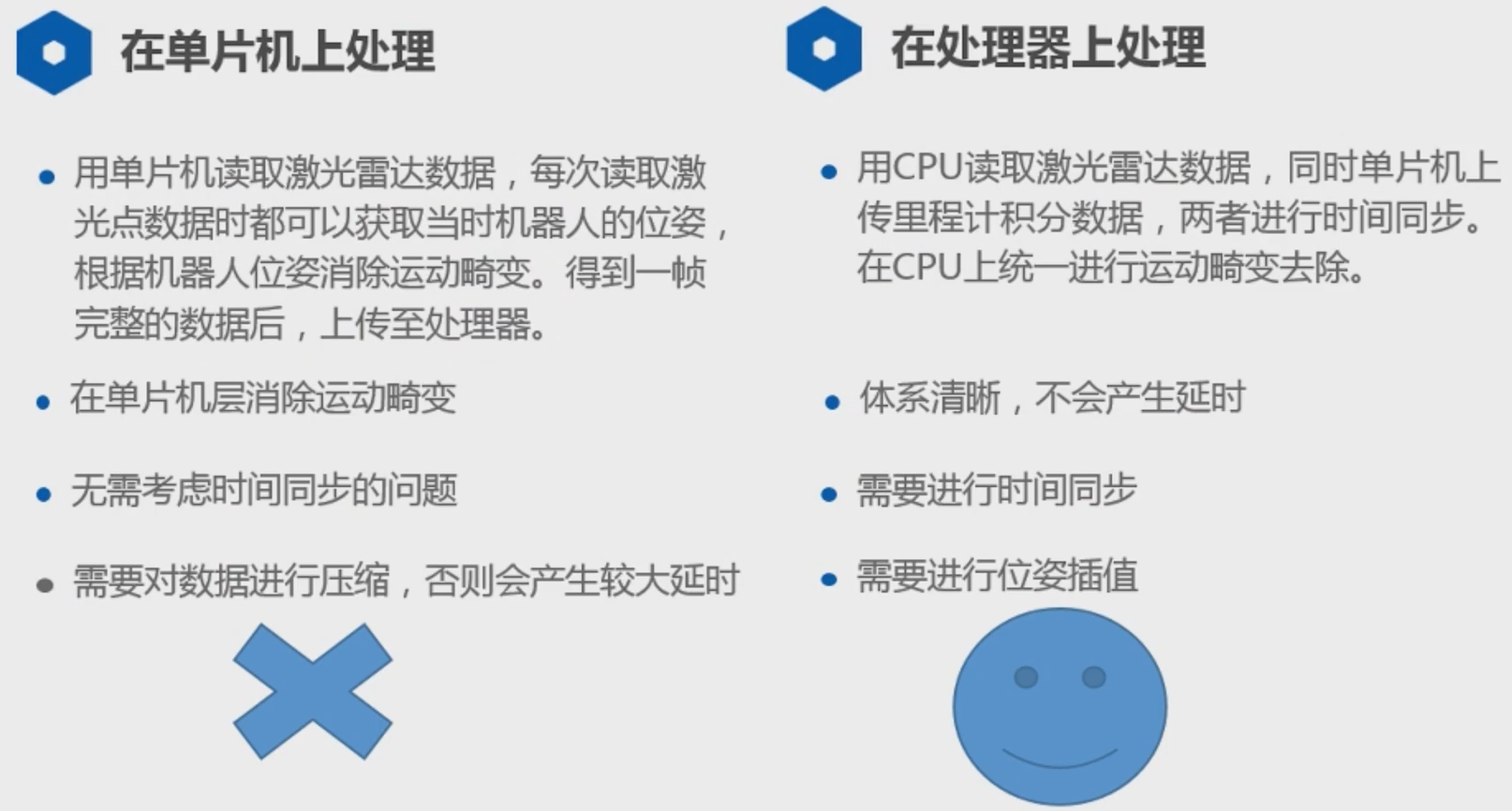
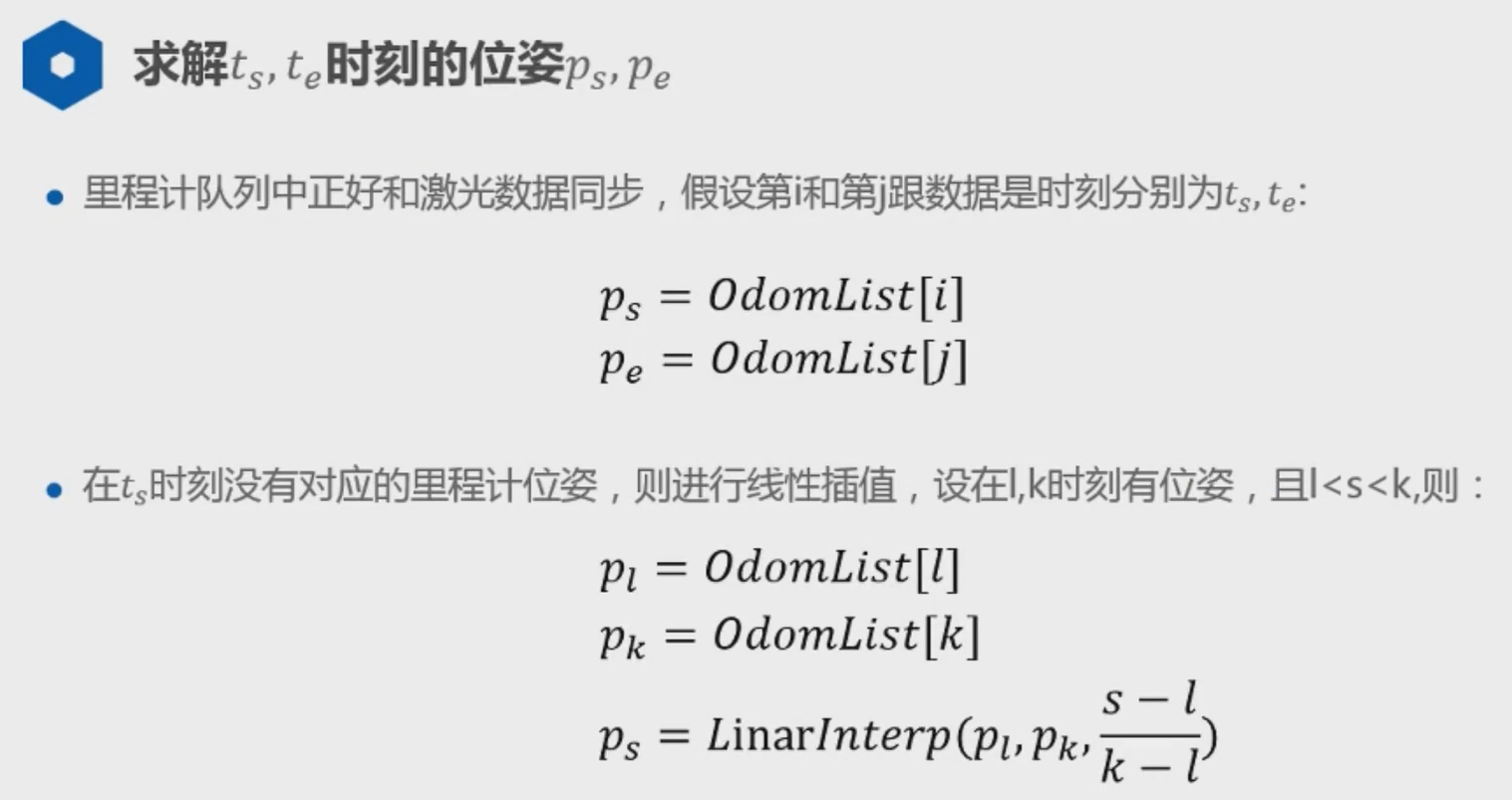
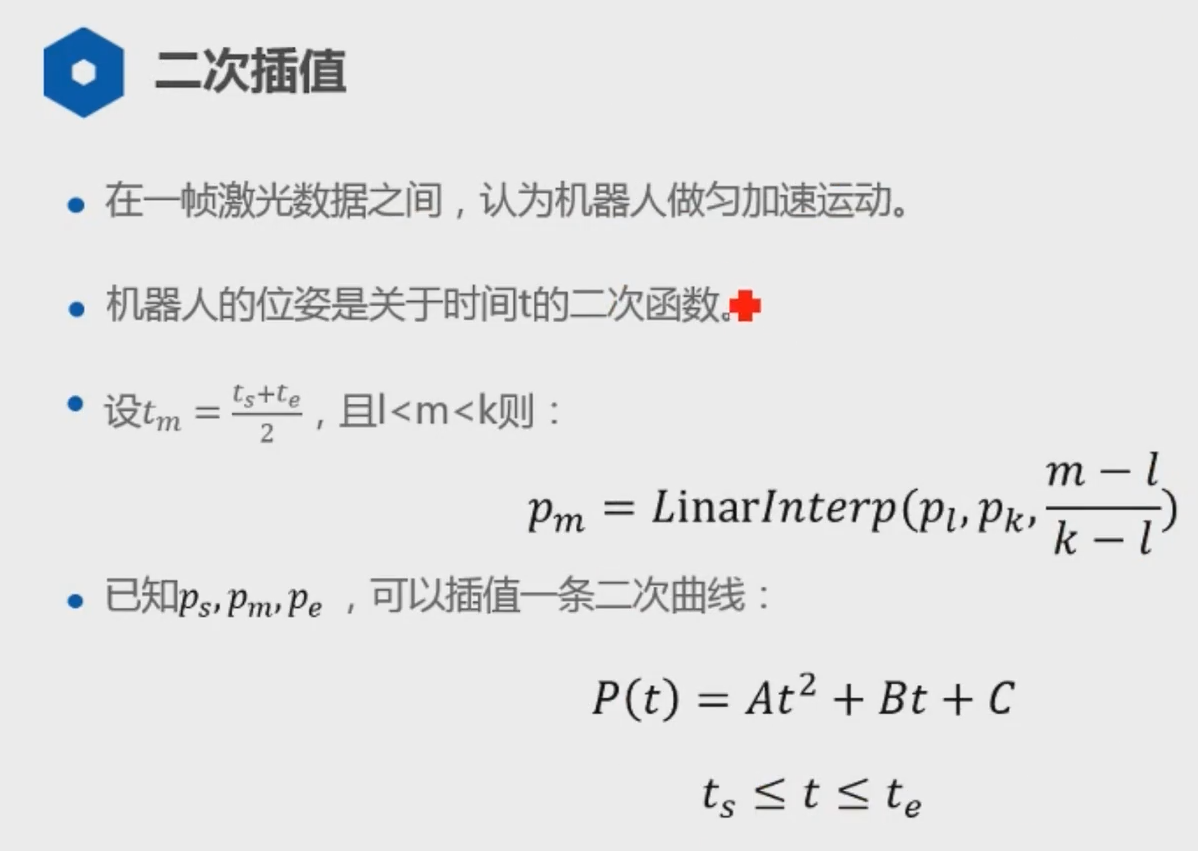
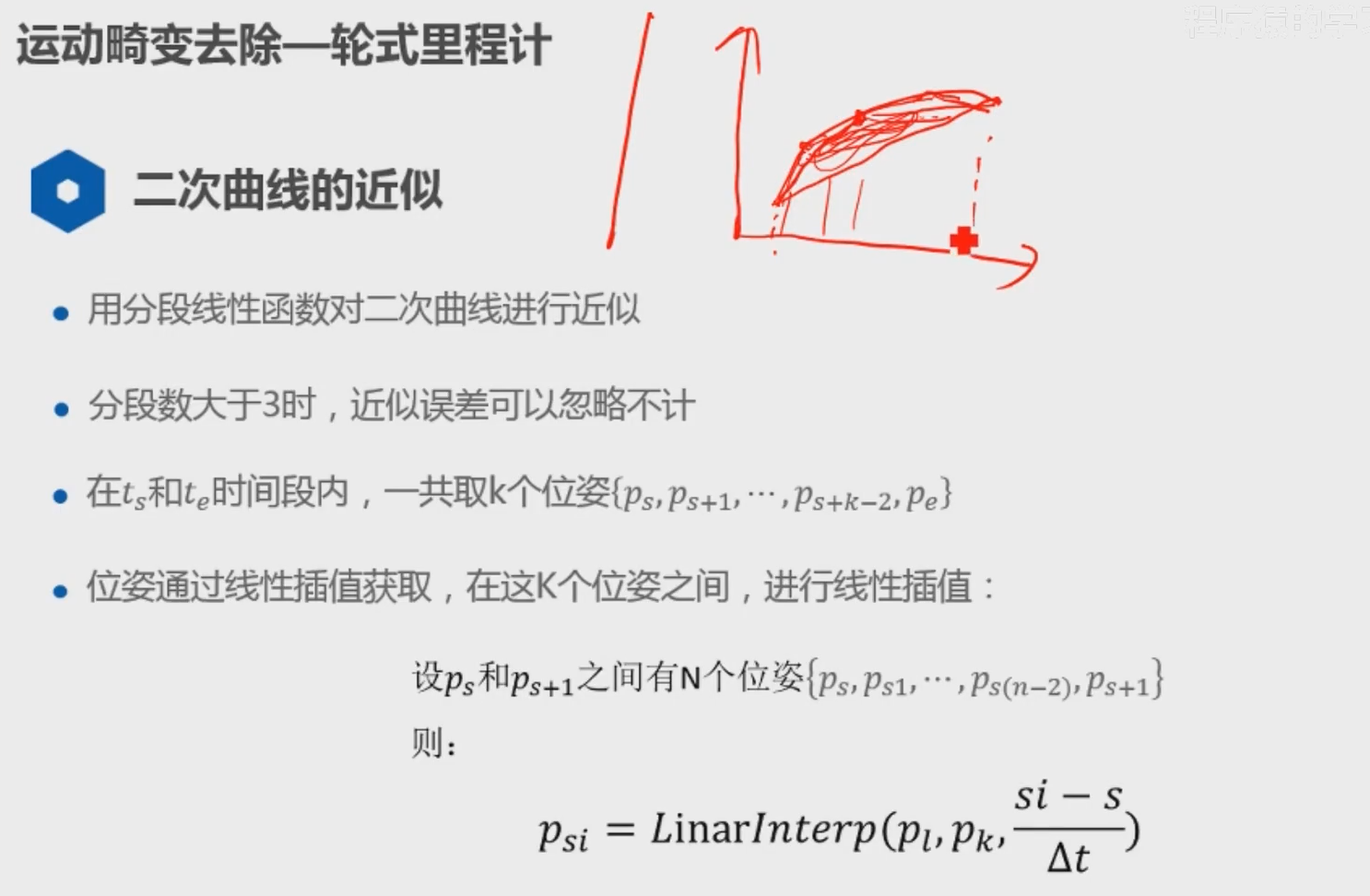
2 运动畸变——传感器辅助
最后
以上就是坚定台灯最近收集整理的关于激光SLAM入门笔记(三)——传感器数据处理之激光雷达运动畸变去除的全部内容,更多相关激光SLAM入门笔记(三)——传感器数据处理之激光雷达运动畸变去除内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复