CTRL+shift+t 新的控制台
1、ssh clbrobot@robot开始在树莓派上运行
前后左右移动:roslaunch clbrobot bringup.launch
rosrun rviz rviz rosrun teleop_twist_keyboard teleop_twist_keyboard.py
机器人关机 sudo halt,就又回到虚拟机上了
电压不能低于11.3
2、IMU的自动校正:
ssh clbrobot@robot开始在树莓派上运行。打开样本文件
然后 rostopic echo /imu/data数值大于1肯定是不行的。下面进行校准,必须在imu目录下 rosrun imu_calib do_calib
不校准,slam的坐标在抖动,imu影响角速度
重新加载roslaunch clbrobot bringup.launch 重新导入imu的文件
imu就是那个小传感器
3、角速度校正
ssh clbrobot@robot
开启底盘节点:roslaunch clbrobot bringup.launch
在另一个控制台ssh clbrobot@robot
rosrun rikirobot_nav calibrate_angular.py
再开控制台 rosrun rqt_reconfigure rqt_reconfigure
在弹出框中勾选start_test转一圈看偏差角度,比如365除以360得到的值填到odom_angular那里面前面两个控制台都关掉,在第一个控制台
把这个值改成刚才的值,先按i,然后esc,再shift+zz退出
4、线速度校正:底盘导航需要里程计数据,里程计数据需要角度与线速度
还是ssh 和bringup,新的控制台,ssh,
rosrun rikirobot_nav calibrate_linear.py
新的控制台:rosrun rqt_reconfigure rqt_reconfigure
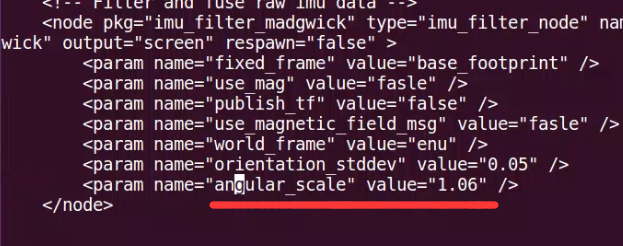
钢尺,拉出一米,然后start_test,如果它跑了1.06。就在odom_linear那里填1.06/1=1.06
和角速度同样的步骤,在类似记事本中找到那个linear_scale改成1.06
5、ros建图
ssh,roslaunch
新的控制台:开启雷达
ssh,roslaunch clbrobot lidar_slam.launch
新的控制台:开启调试窗口 rosrun rviz rviz
interact–open–找到这个slam.rviz
按住中键移动视角
再开一个控制台:rosrun teleop_twist_…这个命令开启键盘控制
slam地图建完整后
开一个控制台:ssh,保存地图
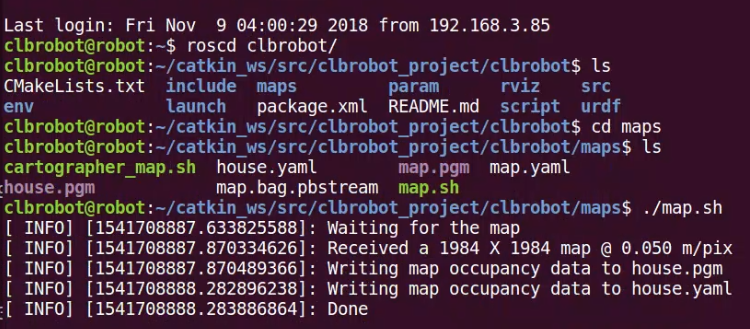
最后
以上就是要减肥耳机最近收集整理的关于履带机器人札记的全部内容,更多相关履带机器人札记内容请搜索靠谱客的其他文章。
![[学习SLAM]分析总结常见的几种移动机器人底盘类型及其运动学 两轮差速底盘(Differential Drive robot)三轮全向轮底盘(Three-wheel omnidirectional wheel robot)四轮全向轮底盘(Four-wheel omnidirectional wheel robot)四轮麦克纳姆轮底盘(Four-wheeled Mecanum wheel robot)四轮滑移底盘(Four-wheel sliding robot)四轮阿克曼底盘(Four-wh](https://www.shuijiaxian.com/files_image/reation/bcimg21.png)







发表评论 取消回复