我是靠谱客的博主 敏感雨,这篇文章主要介绍【Paper】2019_UAV/UGV Autonomous Cooperation: UAV assists UGV to climb a cliff by attaching a tether1 Introduction2 Proposed System3 UAV System Overview4 UGV System Overview5 Tether Attachment6 Experimental Result7 Conclusion,现在分享给大家,希望可以做个参考。
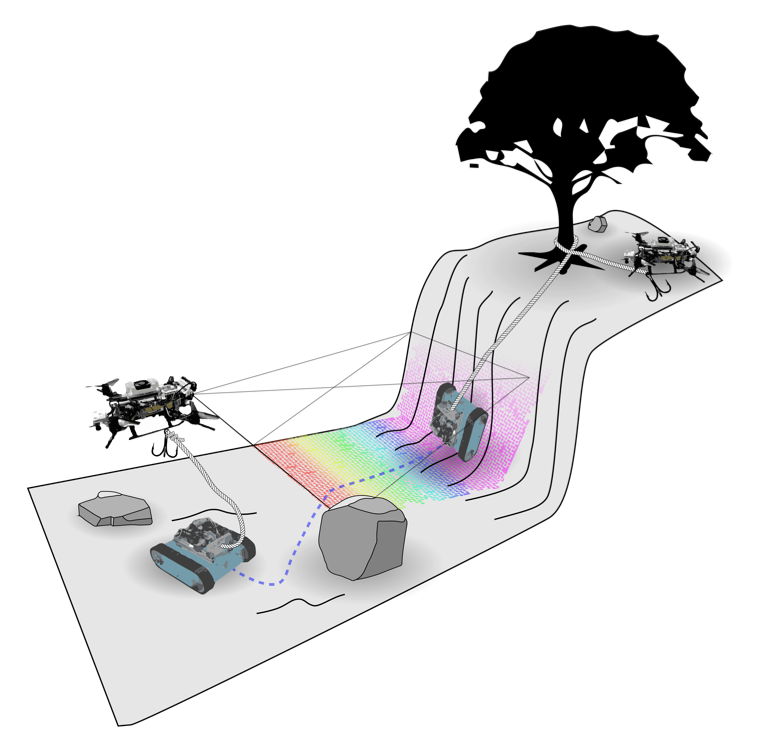
UAV/UGV Autonomous Cooperation: UAV assists UGV to climb a cliff by attaching a tether
- 1 Introduction
- 2 Proposed System
- 2.1 System overview
- 2.2 Mission
- 3 UAV System Overview
- 3.1 Hardware
- 3.2 System
- 3.2.1 VIO
- 3.2.2 Sensor Fusion
- 3.2.3 Obstacle Avoidance
- 3.2.4 Control
- 4 UGV System Overview
- 4.1 Hardware
- 4.2 System
- 4.2.1 Map filtering
- 4.2.2 Path planning
- 4.2.3 Cliff detection
- 4.2.4 Landing Pose Search
- 5 Tether Attachment
- 5.1 Comparison of the tether attachment methods
- 5.1.1 Using a grappling hook
- 5.2 Anchor point detection
- 6 Experimental Result
- 6.1 UAV navigation
- 6.2 UGV Climbing
- 6.3 Tether attachment validation
- 6.4 Whole mission
- 7 Conclusion
1 Introduction
2 Proposed System
2.1 System overview
2.2 Mission
3 UAV System Overview
3.1 Hardware
3.2 System
VIO (Visual Inertial Odometry)
MSF (Multi Sensor Fusion)
MPC (Model Predictive Control)
3.2.1 VIO
3.2.2 Sensor Fusion
3.2.3 Obstacle Avoidance
3.2.4 Control
4 UGV System Overview
4.1 Hardware
4.2 System
Pure Pursuit algorithm
4.2.1 Map filtering
ToF camera
4.2.2 Path planning
4.2.3 Cliff detection
4.2.4 Landing Pose Search
5 Tether Attachment
5.1 Comparison of the tether attachment methods
5.1.1 Using a grappling hook
5.2 Anchor point detection
6 Experimental Result
6.1 UAV navigation
6.2 UGV Climbing
6.3 Tether attachment validation
6.4 Whole mission
7 Conclusion
[ ICRA2019 ] UAV/UGV Autonomous Cooperation: UAV assists UGV to climb a cliff by attaching a tether
最后
以上就是敏感雨最近收集整理的关于【Paper】2019_UAV/UGV Autonomous Cooperation: UAV assists UGV to climb a cliff by attaching a tether1 Introduction2 Proposed System3 UAV System Overview4 UGV System Overview5 Tether Attachment6 Experimental Result7 Conclusion的全部内容,更多相关【Paper】2019_UAV/UGV内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复