SLAM特征点法1——对极几何
相机模型
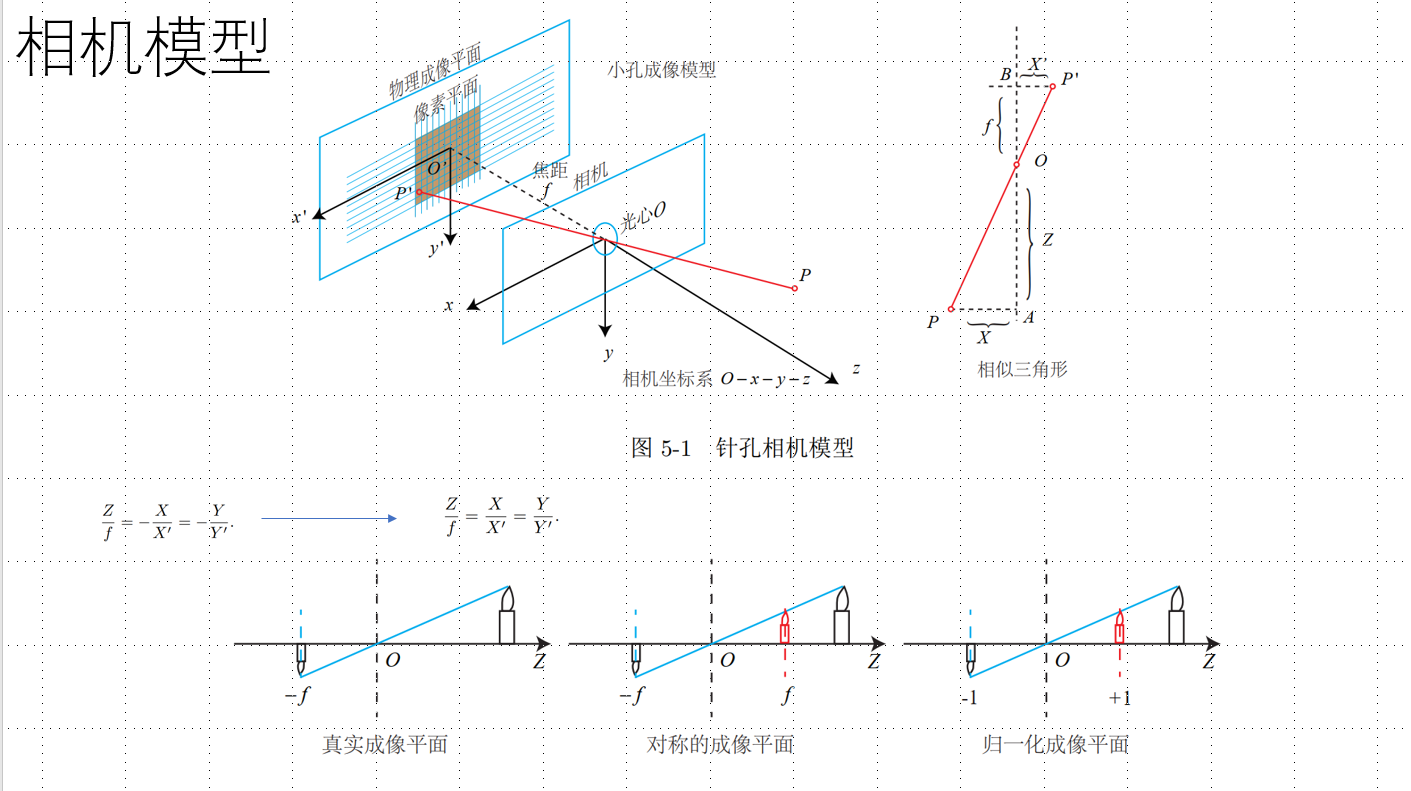
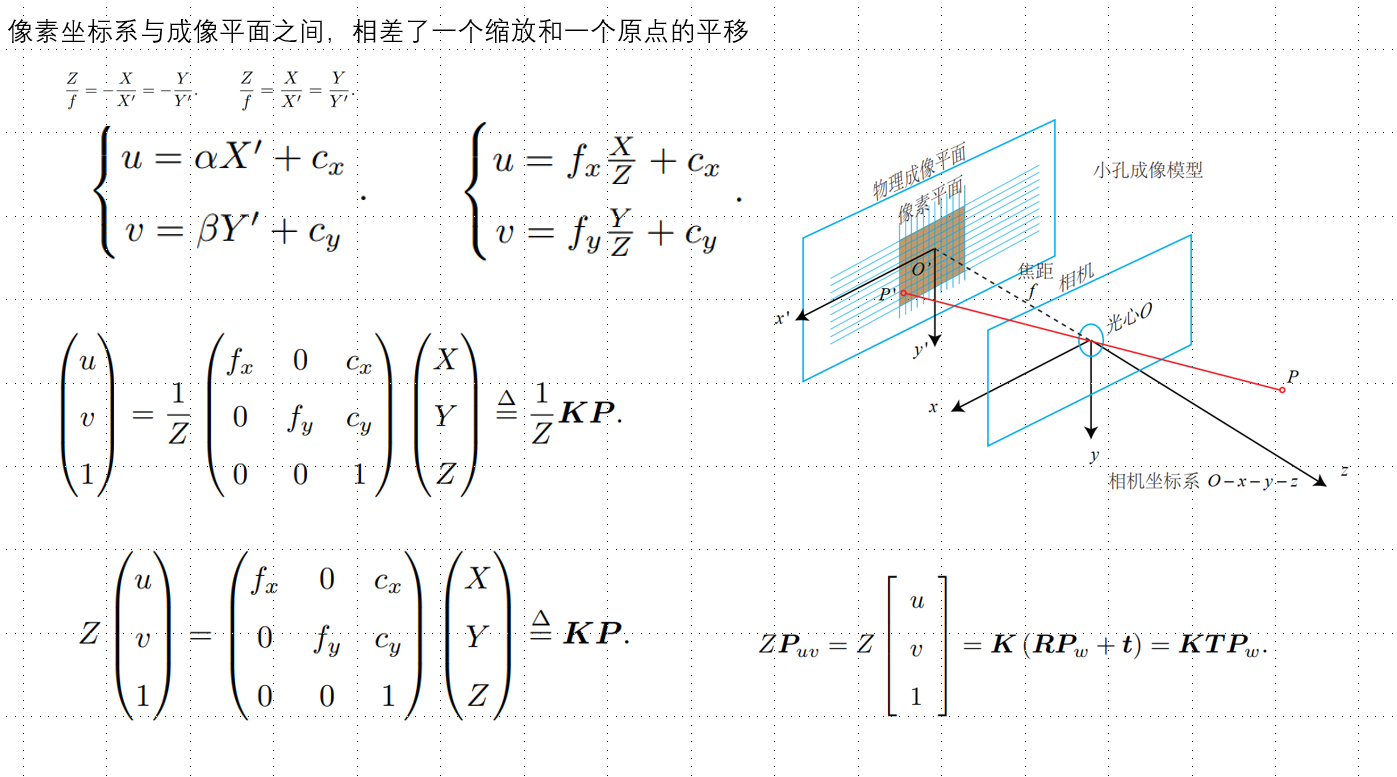
根据上述我们可以得到图像坐标系与世界坐标系的关系,主要是内参和外参两部分构成。其中内参主要是由相机本身的成像过程构成的,外参是由于相机在全局世界坐标系中的姿态(位置+相机姿态)决定的。
对级几何
通过两视图几何之间的关系,从两张图像中估计相机的姿态
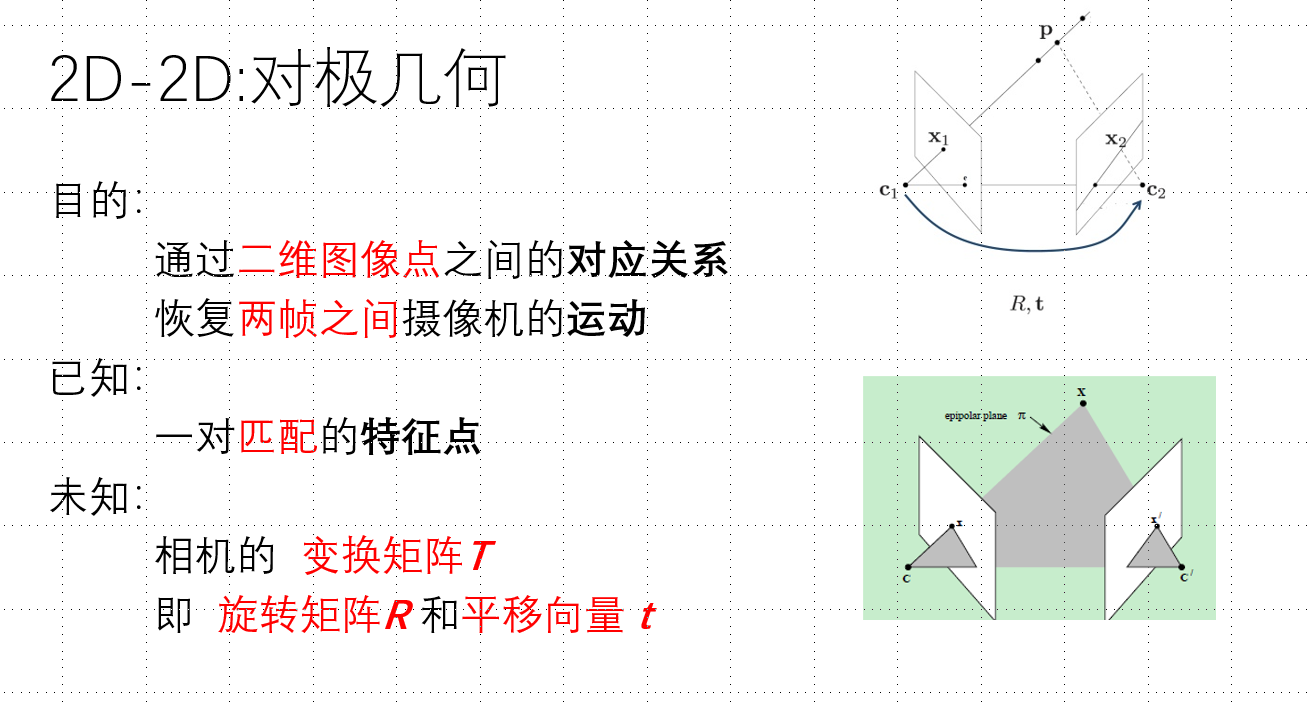
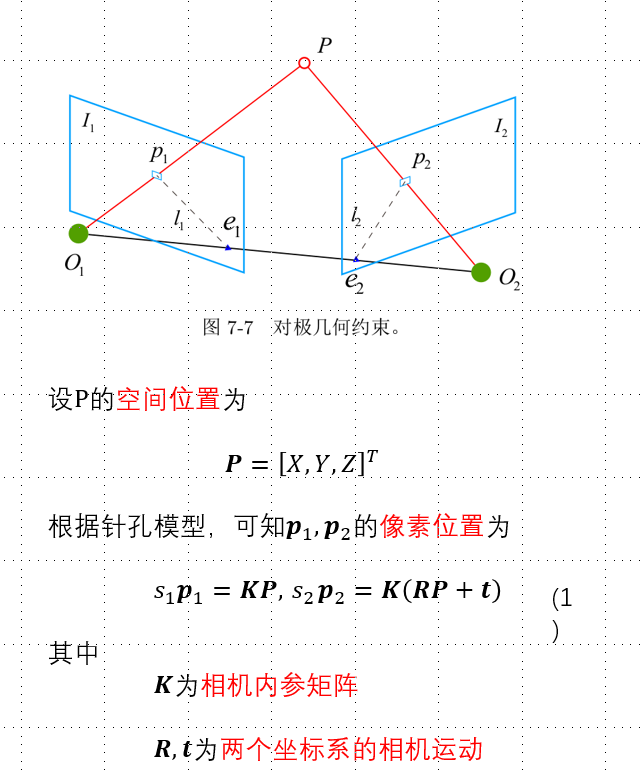
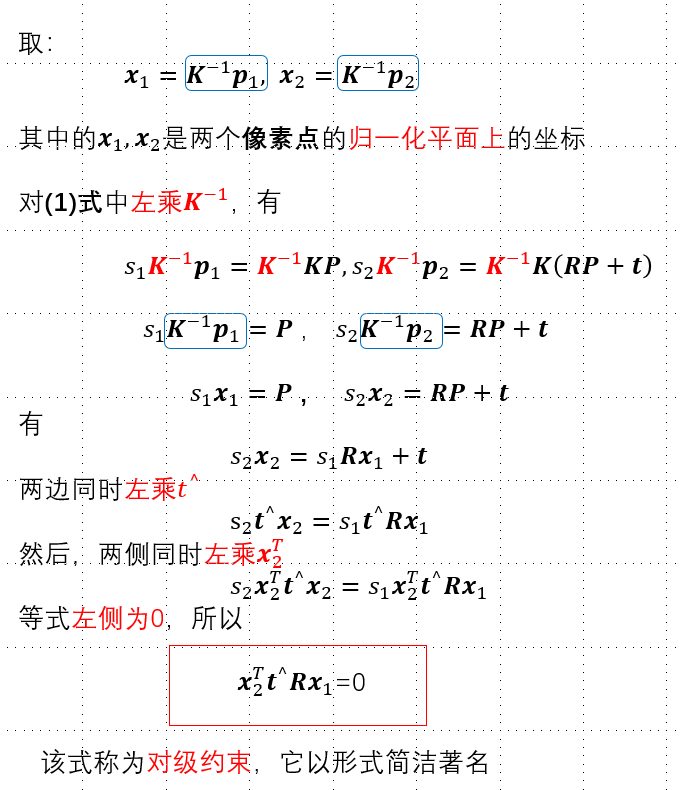
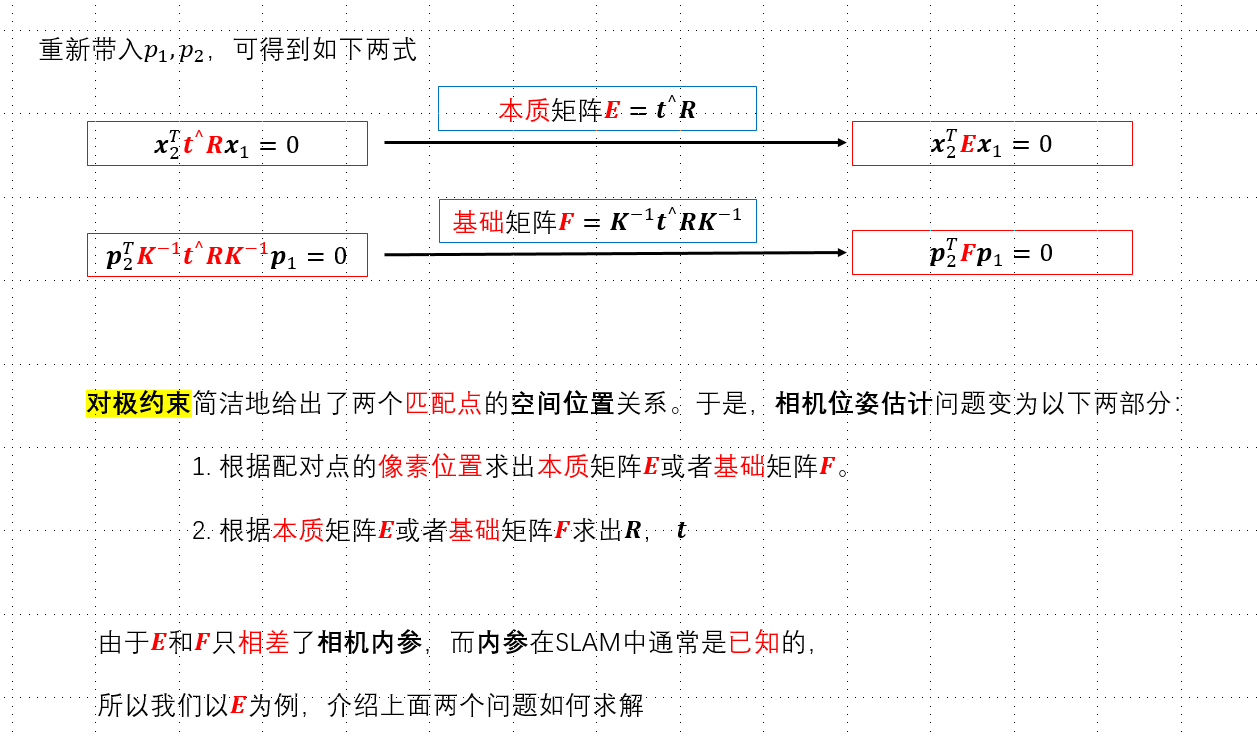
通过上述的推到得到了对级几何约束,下面介绍如何根据该约束求解相机位姿
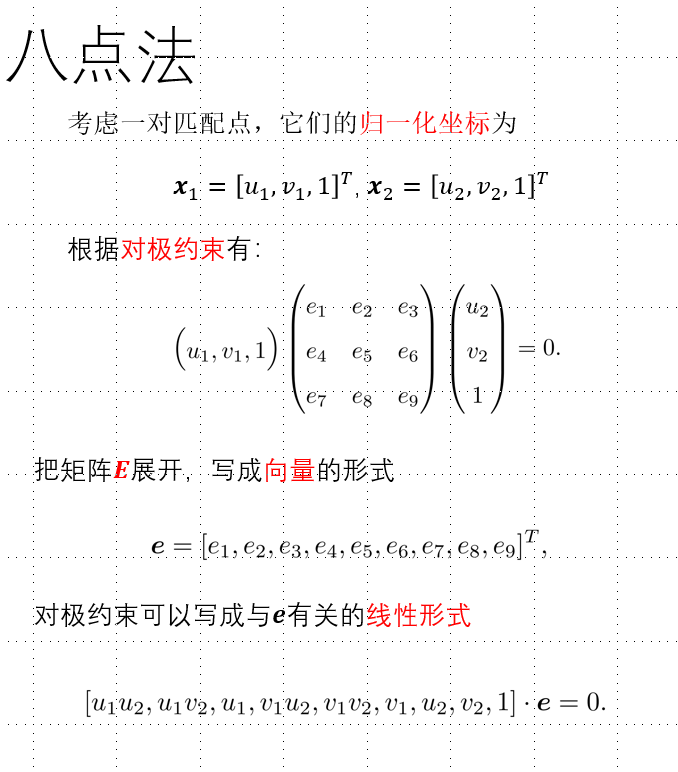
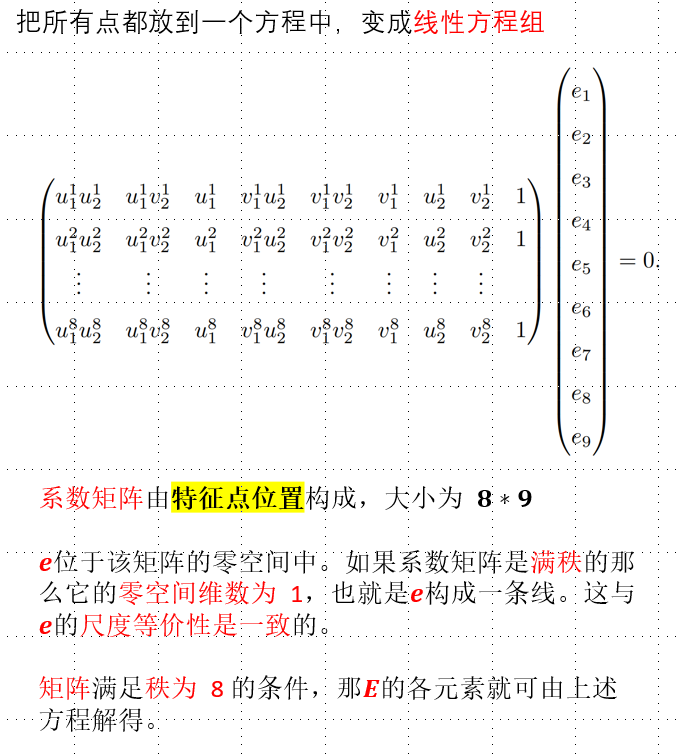
八点法
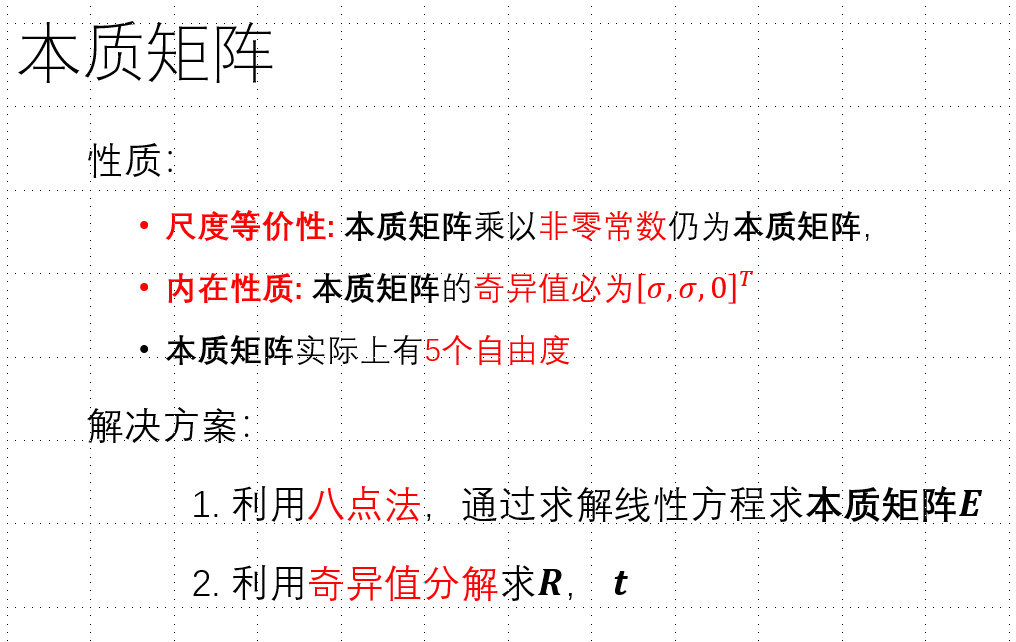
利用八个特征点求解本质矩阵E
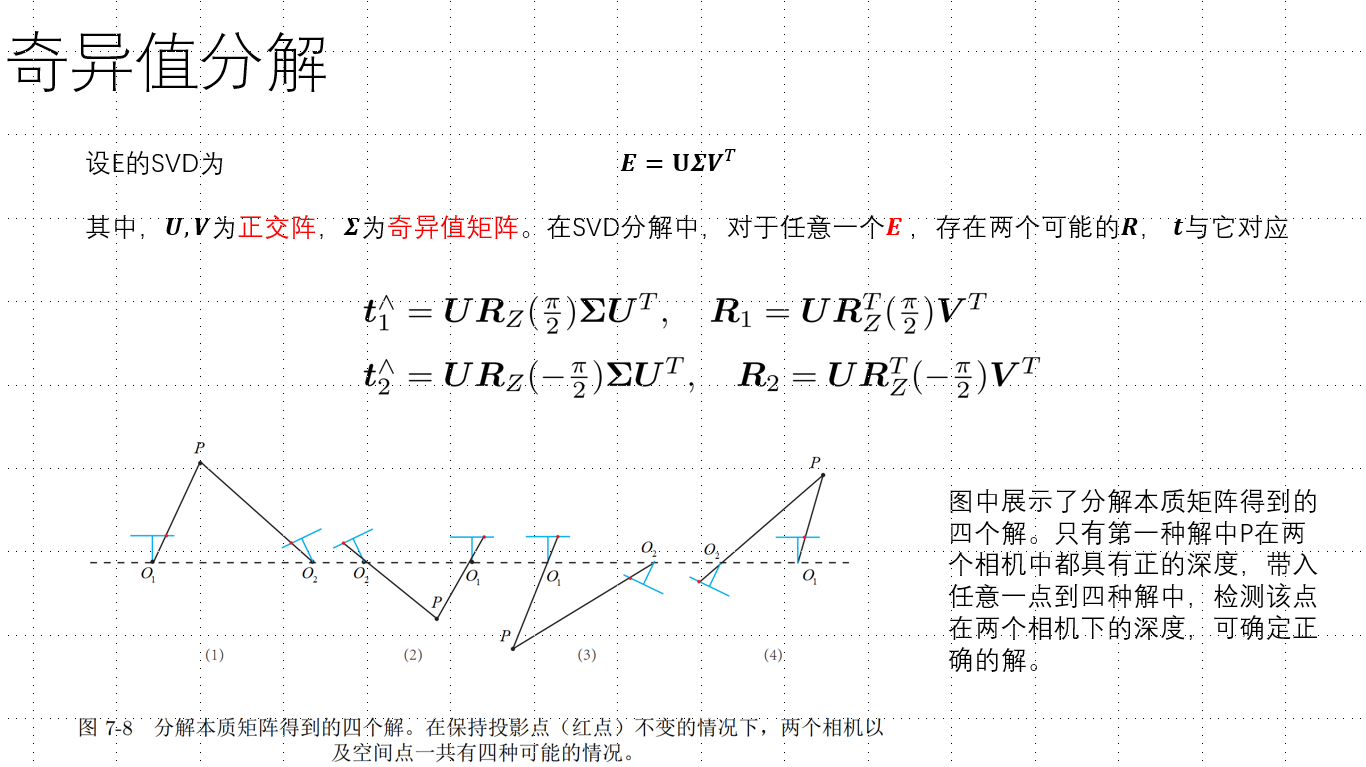
本质矩阵求R,t
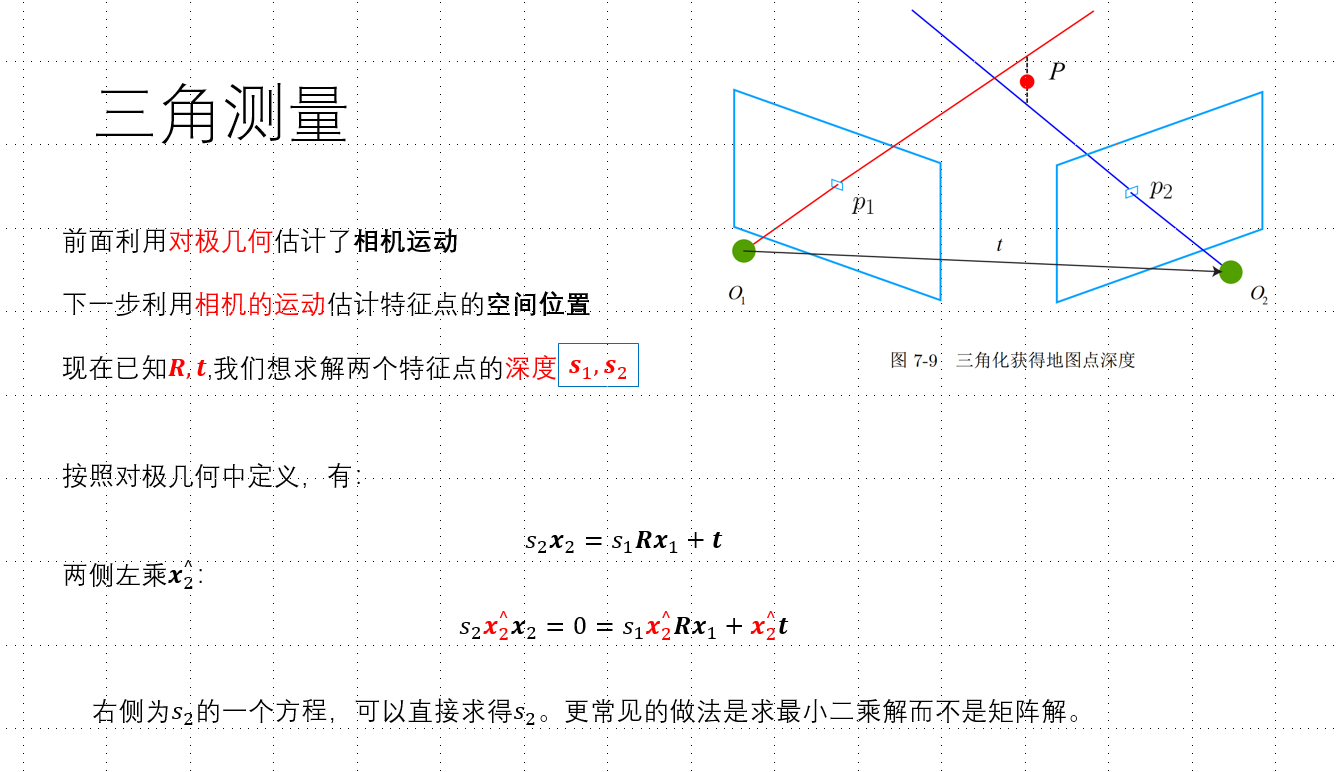
三角测量
通过三角测量,在知道相机位姿的基础上,恢复点的相对深度.
最后
以上就是慈祥冬瓜最近收集整理的关于SLAM特征点法1——对极几何SLAM特征点法1——对极几何对级几何的全部内容,更多相关SLAM特征点法1——对极几何SLAM特征点法1——对极几何对级几何内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复