今天跟着视觉SLAM十四讲 重新推导了一下2D-2D的对极几何公式,对坐标变化公式
P
c
2
=
R
×
P
c
1
+
t
P_{c2}=R×P_{c1}+t
Pc2=R×Pc1+t又有了新的认识
先放上参考链接:https://www.cnblogs.com/houkai/p/6661607.html
这里面到的这么一个关系:
P
c
2
=
R
(
P
c
1
−
T
)
P_{c2}=R(P_{c1}-T)
Pc2=R(Pc1−T)(
T
T
T是两个相机光心之间的平移,注意此时是在
P
c
1
P_{c1}
Pc1的坐标系下的),感觉很难理解,细想之后,搞明白了相机在做变换时候旋转和平移的先后顺序。
我们平时用的公式
P
c
2
=
P
c
1
∗
R
+
t
P_{c2}=P_{c1}*R+t
Pc2=Pc1∗R+t,实际上是先做了旋转,然后再在旋转后的坐标系下平移
t
t
t,这时的小
t
t
t其实对我们而言并不直观,因为我们更倾向于它在
P
c
1
P_{c1}
Pc1坐标系下的表示(我们一般会直接把
P
c
1
P_{c1}
Pc1坐标系看作世界坐标系),而
T
T
T则直观很多,它直接表示了
P
c
1
P_{c1}
Pc1到
P
c
2
P_{c2}
Pc2在世界坐标系(
P
c
1
P_{c1}
Pc1坐标系)下的位移。再由公式来看:
P
c
2
=
R
(
P
c
1
−
T
)
=
R
×
P
c
1
−
R
×
T
=
R
×
P
c
1
+
t
P_{c2}=R(P_{c1}-T)=R×P_{c1}-R×T=R×P_{c1}+t
Pc2=R(Pc1−T)=R×Pc1−R×T=R×Pc1+t
得到:
t
=
−
R
×
T
t=-R×T
t=−R×T
这就更直观的看到,其实他们之间的关系就是一个旋转的关系,至于负号,R代表的是光心之间的平移,反映到点的坐标变换时,应该加个负号(例如坐标系整体右移5个单位,坐标系中的点的横坐标都会减5)
总之,我们平时用的 t t t,它表示的平移并不是我们直观看到的平移,而是相对与旋转之后的坐标系的平移。
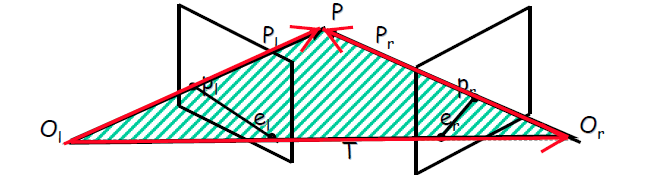
搞清楚了这个,接下来就是对极几何的公式推导了,我直接手写吧:
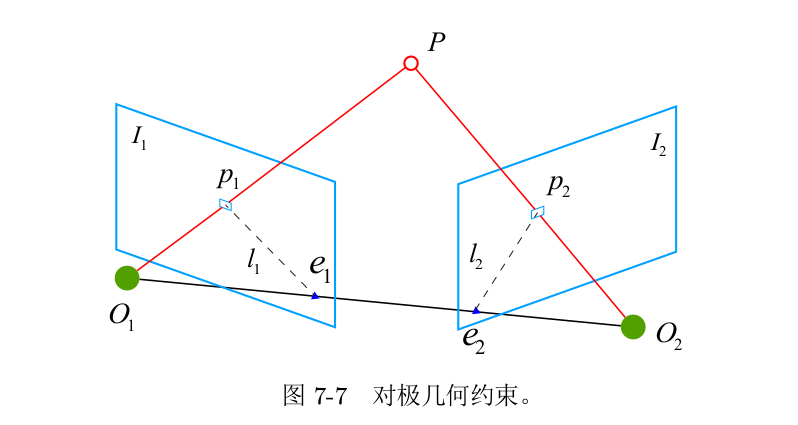
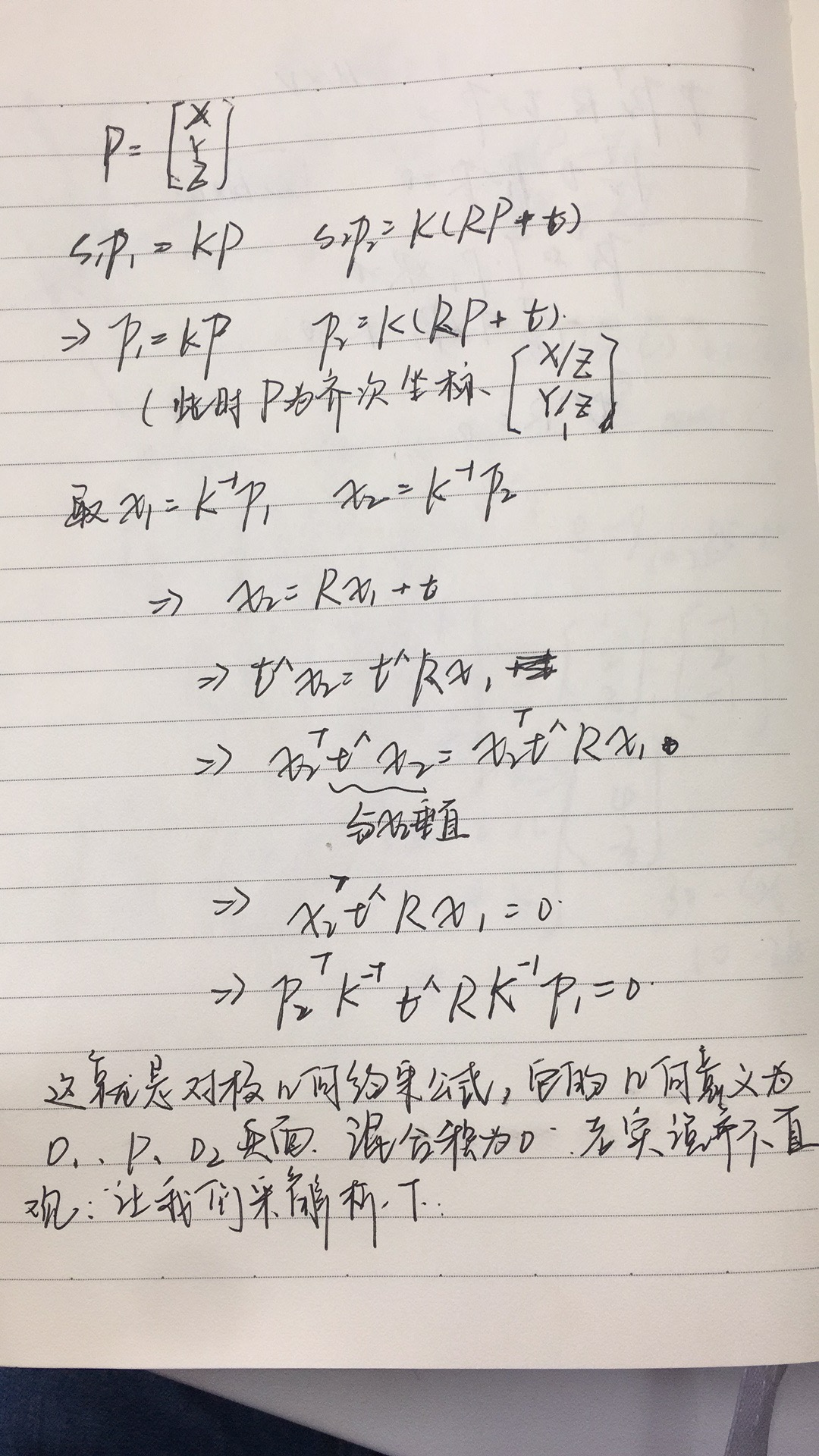
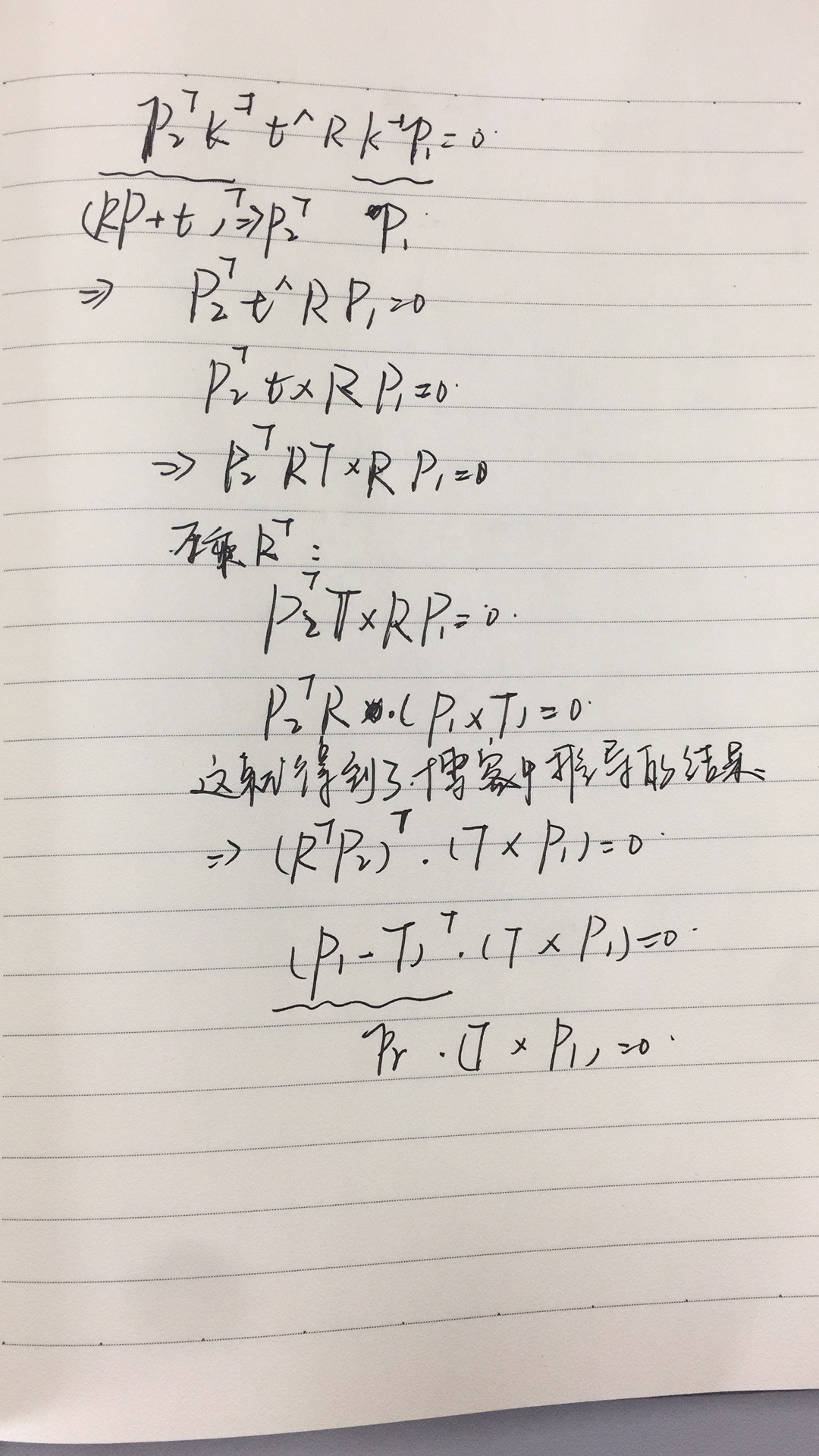 对极几何的约束:
对极几何的约束:
p 2 T K − T t p_2^TK^{-T}t p2TK−Tt^ R K − 1 p 1 = 0 RK^{-1}p_1=0 RK−1p1=0
本质矩阵:
E
=
t
E=t
E=t^
R
R
R
基础矩阵:
F
=
K
−
T
E
K
−
1
F=K^{-T}EK_{-1}
F=K−TEK−1
则对极几何约束为:
p
2
T
F
p
1
=
0
p_2^TFp_1=0
p2TFp1=0
根据匹配点的像素,求出E或F,然后求出R和t。
最后
以上就是会撒娇菠萝最近收集整理的关于2D-2D对极几何的全部内容,更多相关2D-2D对极几何内容请搜索靠谱客的其他文章。








发表评论 取消回复