在SurfaceFlinger的构造方法中调用了DispSync的init方法对DispSync进行初始化,
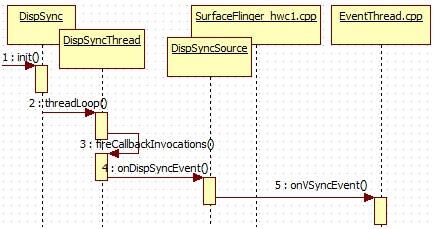
mPrimaryDispSync.init(hasSyncFramework, dispSyncPresentTimeOffset);调用流程图如下,
DispSync的构造方法如下,
DispSync::DispSync(const char* name) :
mName(name),
mRefreshSkipCount(0),
mThread(new DispSyncThread(name)) {
}
创建了DispSyncThread 线程。
DispSyncThread是 DispSync的内部类,继承于Thread,
class DispSyncThread: public Thread {DispSync的init方法主要逻辑如下,
1,运行DispSyncThread 线程,并设置调度策略,
mThread->run("DispSync", PRIORITY_URGENT_DISPLAY + PRIORITY_MORE_FAVORABLE);
struct sched_param param = {0};
param.sched_priority = 2;
if (sched_setscheduler(mThread->getTid(), SCHED_FIFO, ¶m) != 0) {
ALOGE("Couldn't set SCHED_FIFO for DispSyncThread");
}
2,重置并开始进行同步信号,
reset();
beginResync();
3,添加监听事件,
if (!mIgnorePresentFences && kEnableZeroPhaseTracer) {
addEventListener("ZeroPhaseTracer", 0, new ZeroPhaseTracer());
}
对于Thread 线程,调用逻辑顺序如下,
Thread被创建,
Thread中的run被调用,
__threadLoop()被调用,
readyToRun()被调用,
然后循环调用threadLoop()。
并且在threadLoop()返回false时,可以退出循环。
// threadLoop能够循环其实是因为调用它的_threadLoop()方法里面有一个while循环。
DispSyncThread的threadLoop方法主要逻辑如下,
1, 计算下一次的vsync时间,如果这个时间还没到,就wait一段时间差,
if (targetTime == INT64_MAX) {
ALOGV("[%s] Waiting forever", mName);
err = mCond.wait(mMutex);
} else {
ALOGV("[%s] Waiting until %" PRId64, mName, ns2us(targetTime));
err = mCond.waitRelative(mMutex, targetTime - now);
}
2,首先调用gatherCallbackInvocationsLocked方法获取监听对象,
然后调用fireCallbackInvocations方法,进行监听事件的回调,
callbackInvocations = gatherCallbackInvocationsLocked(now);
•••
fireCallbackInvocations(callbackInvocations);
fireCallbackInvocations方法如下,
for (size_t i = 0; i < callbacks.size(); i++) {
callbacks[i].mCallback->onDispSyncEvent(callbacks[i].mEventTime);
}
那么,是调用哪个的onDispSyncEvent方法呢?
调用的是SurfaceFlinger_hwc1.cpp的内部类DispSyncSource的onDispSyncEvent方法,
详细论述见EventThread章节。
DispSyncSource的onDispSyncEvent方法如下,
Mutex::Autolock lock(mCallbackMutex);
callback = mCallback;
•••
if (callback != NULL) {
callback->onVSyncEvent(when);
}
此处的mCallback 是EventThread对象.在EventThread的enableVSyncLocked方法中调用DispSyncSource的setCallback方法进行赋值,
mVsyncEnabled = true;
mVSyncSource->setCallback(static_cast<VSyncSource::Callback*>(this));
mVSyncSource->setVSyncEnabled(true);
DispSyncSource的setCallback方法如下,
virtual void setCallback(const sp<VSyncSource::Callback>& callback) {
Mutex::Autolock lock(mCallbackMutex);
mCallback = callback;
}
EventThread的onVSyncEvent方法如下,
Mutex::Autolock _l(mLock);
mVSyncEvent[0].header.type = DisplayEventReceiver::DISPLAY_EVENT_VSYNC;
mVSyncEvent[0].header.id = 0;
mVSyncEvent[0].header.timestamp = timestamp;
mVSyncEvent[0].vsync.count++;
mCondition.broadcast();
首先为DisplayEventReceiver Event类型的事件对象mVSyncEvent进行赋值,然后唤醒等待的EventThread线程。下面分析EventThread线程,看看是如何休眠的。
最后
以上就是纯情柜子最近收集整理的关于DispSync 分析的全部内容,更多相关DispSync内容请搜索靠谱客的其他文章。








发表评论 取消回复