1. 基本原理
RRT(Rapidly-Exploring Random Trees)快速随机扩展树,是一种单一查询路径规划算法.其基本原理如下.
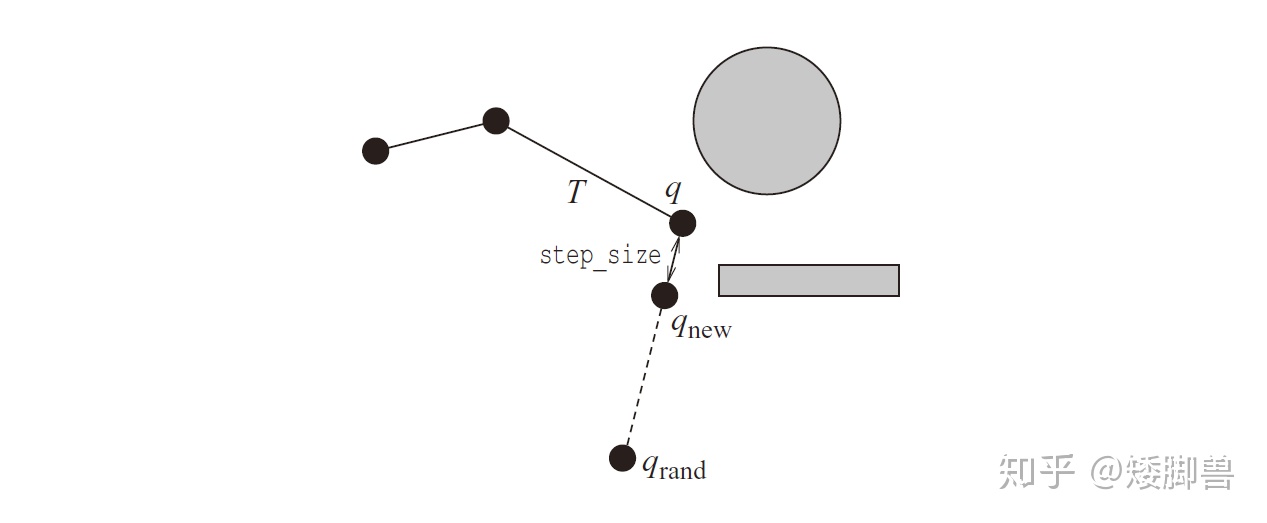
首先,在构型空间内随机(一般使用均匀分布)生成一个节点
重复上述过程,直到路径上最后一个节点距离目标位置在一定范围内,则找到了我们最终的路径.
2. 代码运行结果
知乎视频www.zhihu.com3. 关键C++代码剖析
一共新建了两个类,一个用来创建节点,一个用来运行RRT算法:
class 在RRT中的planning中生成随机的节点并最终形成路径:
while 主函数里主要是设置障碍物、起始位置和目标位置并调用RRT规划函数:
int 代码已上传Github,欢迎下载.
Github RRT Algorithmgithub.com最后
以上就是朴素香烟最近收集整理的关于蚁群算法路径规划_机器人路径规划之RRT算法(附C++源码)的全部内容,更多相关蚁群算法路径规划_机器人路径规划之RRT算法(附C++源码)内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。



![[转载]简单蚁群算法的实现](https://www.shuijiaxian.com/files_image/reation/bcimg3.png)




发表评论 取消回复