一、动力学基础概念
基本动力学模型

建模方法
牛顿-欧拉法
拉格朗日法
连杆质量,连杆质心位置矢量,连杆质心惯性矩阵(通过动力学参数识别获得)
二、牛顿-欧拉法
运动外推:向外迭代计算连杆的角速度、角加速度和线加速度
力外推:计算作用在连杆质心上的惯性力和力矩
力矩内推:向内迭代计算关节力矩
2.1 运动向外迭代
2.1.1 刚体线速度和角速度
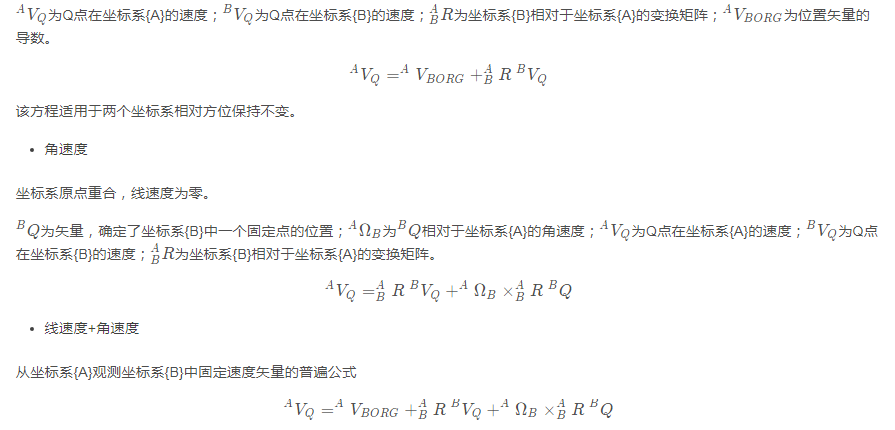
线速度
坐标系{A}为固定,坐标系{B}固连在刚体上。
2.1.2 连杆速度
连杆i+1的速度为连杆i的速度加上附加到关节i+1上的速度分量。
注意:线速度相对于一点,角速度相对于一个物体,因此,"连杆的速度“指连杆坐标原点的线速度和连杆的角速度
角速度
连杆i+1的角速度等于连杆i的角速度加上一个由于关节i+1上的角速度引起的分量。
最后
以上就是踏实短靴最近收集整理的关于matlab计算机械臂素的,机械臂动力学——动力学建模的全部内容,更多相关matlab计算机械臂素内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复