一、环境介绍
MCU: STM32F103C8T6
GSM模块: 移远MC20 (MT2503D)(GSM+GPS共存)功能很强大
开发软件: Keil5
MQTT协议采用OneNet的旧版协议,登录OneNet控制台创建应用时要选择旧版本。
如果想使用新版本的标准MQTT协议连接OnetNet请参考这里: https://blog.csdn.net/xiaolong1126626497/article/details/107385118
完整源代码下载: https://download.csdn.net/download/xiaolong1126626497/18245206
二、MC20模块


MC20模块采用联发科技最新推出的多功能通信定位芯片研制而成。它是一款集成LCC封装、四频段GSM/GPRS和先进算法GNSS引擎于一体的全功能通信模块,具有超小体积、低功耗、双卡单待等优势。MC20不仅内嵌丰富的网络协议(如 TCP、UDP、PPP、FTP、HTTP以及SSL),还集成了多星座卫星系统(如北斗、GPS、QZSS),因此能提供无线移动通信以及精准的导航定位功能。
除具备GSM/GPRS无线通信功能外,MC20模块还支持先进的GNSS技术。它集成了EPOTM(用户无需自设服务器,直接从MTK服务器获取EPO数据)、秒定等技术,能够实现快速首次定位。由于支持北斗、GPS、QZSS等多星座卫星系统解调算法,其定位更加精准,抗多路径干扰能力更强,比传统GPS模块具有更多优势。另外,MC20模块中内置LNA和低功耗算法:前者使其接收灵敏度提升至-149dBm;后者使其在低功耗模式(GLP Mode)下的耗流仅为正常工作模式的40%。
MC20模块较传统GSM+GNSS方案体积减少40%,使其在各种应用中占具更大优势。其主要应用领域为:可穿戴设备(智能手表)、宠物追踪、财产追踪及行车记录仪等等。
主要优势
● 超小体积: 18.7mm × 16.0mm × 2.1mm
● 多卫星导航系统: GPS/BeiDou/QZSS
● GNSS 接收机通道: 99 路捕获通道/33 路跟踪通道
● 支持多种 AGPS 技术,如 EASYTM 、EPOTM 、秒定等
● 内置 LNA 大大提升 GNSS 接收机灵敏度(-167dBm@跟踪模式):可使用无源 GNSS 天线而无需任何外部低噪声放大器
● 支持增强型 GNSS 功能,如 SDK 命令、LOCUSTM 、AIC 和 GLP
● 多功能四频段 GSM模块: 850/900/1800/1900MHz
● 内嵌丰富网络协议: TCP/UDP/PPP/HTTP/FTP/SSL
● 支持语音、短信、QuecFOTATM 、双卡单待以及 OpenCPU 功能
● 支持蓝牙 V3.0 以及 SPP & HFP-AG 配置文件
三、代码功能
使用STM32F103C8T6 通过串口+AT指令控制MC20模块+MQTT协议,登录OneNet服务器上传GPS数据,LED控制(网页按钮控制开发板上的LED灯)。
四、核心代码
4.1 main.c
#include "stm32f10x.h"
#include "beep.h"
#include "delay.h"
#include "led.h"
#include "sys.h"
#include "usart.h"
#include <string.h>
#include <stdio.h>
#include "timer.h"
#include "mc20.h"
//网络协议层
#include "onenet.h"
//协议封装文件
#include "dStream.h"
//产品ID
char PROID[]="231174";
//鉴权信息
char AUTH_INFO[]="1234567890";
//设备ID
char DEVID[]="523369555";
//API KEY
char API_KEY[]="k6vtrrEd1H7UMddiF3DzripS47w=";
//缓冲区
char onenet_http_cmd[1024];
//服务器IP地址
#define TCP_SERVER_IP_ADDR "183.230.40.39"
//服务器端口号
#define TCP_SERVER_PORT 6002
//数据流结构
DATA_STREAM data_stream[1]=
{
{"gps","88.88",TYPE_JSON,1},
};
/*
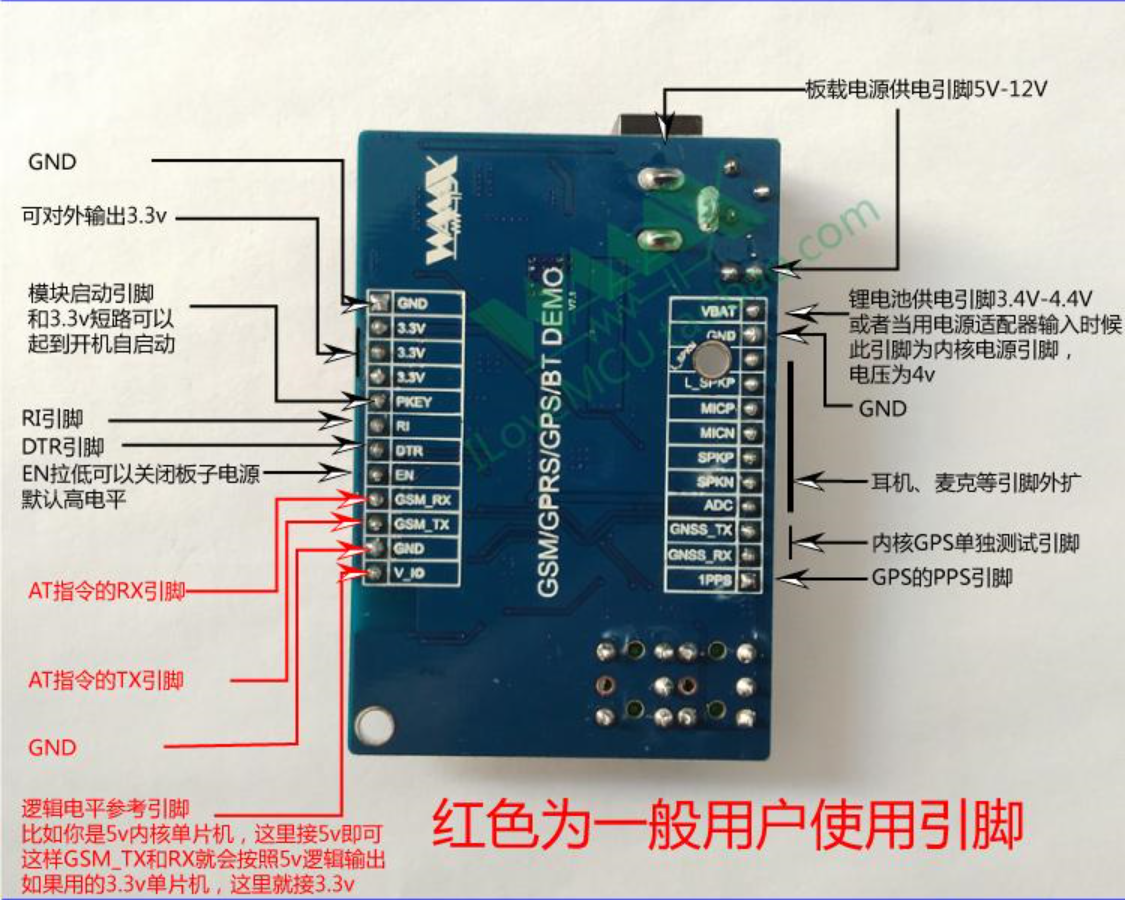
STM32开发板接线说明:
STM32 MC20
3.3V ------> V_IO
GND <-----> GND
PA3 <------ GSM_TX
PA2 ------> GSM_RX
*/
int main()
{
u32 time_cnt=0;
u32 cnt=0;
double Longitude; //经度
double latitude; //纬度
LED_Init();
BEEP_Init();
USART_X_Init(USART1,72,115200);
TIM2_Init(72,20000); //辅助串口2接收,超时时间为20ms
USART_X_Init(USART2,36,9600); //连接着MC20(GPS+GPRS)
printf("串口准备就绪.....rn");
DelayMs(500);
printf("程序修改时间: %srn",__TIME__);
while(1)
{
u8 stat;
/*初始化MC20,并连接到指定服务器*/
MC20_InitConnect(TCP_SERVER_IP_ADDR,TCP_SERVER_PORT);
/*登录OneNET服务器,上线设备*/
stat=OneNet_DevLink();
if(stat)printf("ERROR:%d,接入OneNET失败:%drn",stat,cnt++);
else break; //登录成功
LED1=!LED1;
delay_ms(200);
break;//失败也退出继续运行下面代码
}
printf("6. OneNET服务器登录成功!rn");
delay_ms(100);
while(1)
{
/*6. 向OneNet服务器5秒发送一次数据*/
time_cnt++;
DelayMs(1);
if(time_cnt>=5000)
{
time_cnt=0;
/*获取一次GPS输出的经纬度信息*/
switch(MC20_GetGPS_Data(&Longitude,&latitude))
{
case 0: printf("经度:%f,纬度:%frn",Longitude,latitude); break;
case 1: printf("ERROR:GPS数据接收失败!rn"); break;
case 2: printf("ERROR:GPS定位数据解码失败!<请将GPS拿到空旷位置定位>rn"); break;
}
//组装数据格式
sprintf(onenet_http_cmd,"{"lon":%f,"lat":%f}",Longitude,latitude);
data_stream[0].dataPoint=onenet_http_cmd; //赋值GPS数据
//向云端发送数据流
OneNet_SendData(FORMAT_TYPE1,DEVID,API_KEY,data_stream,1);
}
/*实时接收MC20收到的数据,进行解析*/
if(USART2_RX_FLAG)
{
USART2_RX_BUFF[USART2_RX_CNT]='�';
printf("USART2_RX_BUFF=%srn",USART2_RX_BUFF); //向串口打印信息
//解析平台返回的数据
OneNet_RevPro(USART2_RX_BUFF);
USART2_RX_CNT=0;
USART2_RX_FLAG=0;
memset(USART2_RX_BUFF,0,sizeof(USART2_RX_BUFF));
}
}
}
4.2 mc20.c
#include "mc20.h"
/*
函数功能:向MC20模块发送指令
函数参数:
char *cmd 发送的命令
char *check_data 检测返回的数据
返回值: 0表示成功 1表示失败
*/
u8 MC20_SendCmd(char *cmd,char *check_data)
{
u16 i,j;
for(i=0;i<5;i++) //测试的总次数
{
USART2_RX_FLAG=0;
USART2_RX_CNT=0;
memset(USART2_RX_BUFF,0,sizeof(USART2_RX_BUFF));
USART_X_SendString(USART2,cmd); //发送指令
for(j=0;j<500;j++) //等待的时间(ms单位)
{
if(USART2_RX_FLAG)
{
USART2_RX_BUFF[USART2_RX_CNT]='�';
if(strstr((char*)USART2_RX_BUFF,check_data))
{
return 0;
}
else break;
}
delay_ms(10); //一次的时间
}
}
return 1;
}
/*
函数功能: MC20初始化检查
*/
u8 MC20_InitCheck(void)
{
return MC20_SendCmd("ATrn","OKrn");
}
/*
函数功能: 开启GPS功能
返 回 值:0表示成功 1表示失败
*/
u8 MC20_StartGPS(void)
{
//先判断GPS功能是否启动
if(MC20_SendCmd("AT+QGNSSC?rn","+QGNSSC: 1"))
{
//没有启动就启动GPS功能
if(MC20_SendCmd("AT+QGNSSC=1rn","OKrn"))
{
return 1; //GPS功能启动失败
}
}
return 0;
}
/*
函数功能:从buf里面得到第cnt个逗号所在的位置
返 回 值:0~254,代表逗号所在位置的偏移.
255,代表不存在第cnt个逗号
*/
u8 GPS_GetCommaOffset(char *buf,u8 cnt)
{
char *p=buf;
while(cnt)
{
if(*buf=='*'||*buf<' '||*buf>'z')return 255;//遇到'*'或者非法字符,则不存在第cx个逗号
if(*buf==',')cnt--;
buf++;
}
return buf-p; //计算偏移量
}
/*
函数功能: 获取GPS经纬度数据值
函数参数:
double *Longitude :经度
double *latitude :纬度
返回值: 0表示定位成功,1表示定位失败
说明: 解析$GNRMC命令,得到经纬度
$GNRMC,023705.000,A,2842.4164,N,11549.5713,E,1.73,91.65,150319,,,A*41
转换公式示例:
经度: dddmm.mmmm 东经 11408.4790 114+(08.4790/60)=114.141317
纬度: ddmm.mmmm 北纬 2236.9453 22+(36.9453/60)= 22.615755
*/
u8 GPS_GNRMC_Decoding(char *gps_buffer,double *Longitude,double *latitude)
{
u8 Offset;
u32 int_data;
double s_Longitude,s_latitude;
char *p;
/*1. 确定下定位是否成功*/
p=strstr(gps_buffer,"$GNRMC");
if(!p)return 1;
Offset=GPS_GetCommaOffset(p,2);
if(Offset==255)return 2;
if(*(p+Offset)!='A')return 3; //定位不准确
/*2. 得到纬度*/
Offset=GPS_GetCommaOffset(p,3);
if(Offset==255)return 4;
sscanf(p+Offset,"%lf",&s_latitude);
s_latitude=s_latitude/100;
int_data=s_latitude;//得到纬度整数部分
s_latitude=s_latitude-int_data;//得到纬度小数部分
s_latitude=(s_latitude)*100;
*latitude=int_data+(s_latitude/60.0); //得到转换后的值
/*3. 得到经度*/
Offset=GPS_GetCommaOffset(p,5);
if(Offset==255)return 5;
sscanf(p+Offset,"%lf",&s_Longitude);
s_Longitude=s_Longitude/100;
int_data=s_Longitude;//得到经度整数部分
s_Longitude=s_Longitude-int_data; //得到经度小数部分
s_Longitude=s_Longitude*100;
*Longitude=int_data+(s_Longitude/60.0);
return 0;
}
/*
函数功能: 获取一次GPS经纬度数据
函数参数:
double *Longitude :经度
double *latitude :纬度
返回值: 0表示定位成功,1表示数据接收失败,2表示定位失败
*/
u8 MC20_GetGPS_Data(double *Longitude,double *latitude)
{
/*1. 发送获取GPS数据的指令*/
if(MC20_SendCmd("AT+QGNSSRD="NMEA/RMC"rn", "OKrn"))return 1;
/*2. 对GPS数据进行解码*/
if(GPS_GNRMC_Decoding((char *)USART2_RX_BUFF,Longitude,latitude))return 2;
//解码成功
return 0;
}
/*
函数功能: 连接服务器
函数参数:
char *server_ip 服务器IP地址
u16 port 服务器端口号
返回值: 0表示连接成功,1表示连接失败
*/
u8 MC20_Connect_TCP_Server(char *server_ip,u16 port)
{
char send_buf[100]={0};
sprintf(send_buf,"AT+QIOPEN="TCP","%s","%d"rn",server_ip,port);
//连接至服务器
if(MC20_SendCmd(send_buf, "CONNECT"))
{
return 1; //连接失败
}
return 0; //连接成功
}
/*
函数功能: 向服务器发送数据
函数参数:
u8 *buffer 发送的数据
u32 len 发送的长度
返 回 值: 0表示发送成功,1表示准备发送失败,2表示数据发送失败
*/
u8 MC20_ClientSendData(u8 *buffer,u32 len)
{
char send_buf[2];
/*1. 准备发送数据*/
if(MC20_SendCmd("AT+QISENDrn",">"))
{
printf("AT+QISEND->ERROR Info:%srn",USART2_RX_BUFF);
return 1;
}
/*2. 开始发送数据*/
USART_X_SendData(USART2,buffer,len);
delay_ms(20);
/*3. 发送结束符*/
send_buf[0] = 0x1a;
send_buf[1] = '�';
if(MC20_SendCmd(send_buf,"OKrn"))
{
printf("发送结束符->ERROR Info:%srn",USART2_RX_BUFF);
return 2;
}
return 0;
}
/*
函数功能: MC20初始化检查并连接至服务器
*/
#include "led.h"
void MC20_InitConnect(char *server_ip,u16 port)
{
/*1. MC20模块初始化检查*/
while(MC20_InitCheck())
{
LED1=!LED1;
printf("ERROR:MC20模块初始化检查失败!rn");
delay_ms(100);
}
printf("1. MC20模块初始化成功!rn");
delay_ms(100);
/*2. 查询是否有PIN码锁定*/
while(MC20_SendCmd("AT+CPIN?rn","READY"))
{
LED1=!LED1;
printf("ERROR:PIN码锁定检查失败!rn");
delay_ms(100);
}
printf("2. PIN码锁定检查成功!rn");
delay_ms(100);
/*3. 查询SIM卡网络注册信息*/
if(MC20_SendCmd("AT+CREG?rn",",1")) //本地SIM卡
{
if(MC20_SendCmd("AT+CREG?rn",",5"))//漫游SIM卡
{
printf("ERROR:查询SIM卡网络注册信息失败!n");
}
else printf("3. 漫游SIM卡网络注册成功!n");
}
else printf("3. 本地SIM卡网络注册成功!n");
delay_ms(100);
/*4. 启动GPS功能*/
if(MC20_StartGPS())
{
printf("ERROR:GPS功能启动失败!n");
}
else printf("4. GPS功能启动成功!n");
delay_ms(100);
/*5. 连接指定服务器*/
while(MC20_Connect_TCP_Server(server_ip,port))
{
printf("ERROR: 连接TCP服务器失败!rn现在正在断开服务器,进行重连!rn需要保证服务器地址正确,并且SIM卡可以上网rn");
/*先断开服务器连接 (如果之前没有连接过服务器,这里就会出现错误)*/
MC20_SendCmd("AT+QICLOSErn","OKrn");
delay_ms(100);
MC20_SendCmd("AT+QIDEACTrn","OKrn");
delay_ms(100);
}
printf("5. 连接TCP服务器成功!n");
delay_ms(100);
}
4.2 mc20.h
#ifndef _MC20_H
#define _MC20_H
#include "stm32f10x.h"
#include "usart.h"
#include "delay.h"
#include <string.h>
u8 MC20_SendCmd(char *cmd,char *check_data);
u8 MC20_InitCheck(void);
u8 MC20_StartGPS(void);
u8 MC20_GetGPS_Data(double *Longitude,double *latitude);
u8 MC20_Connect_TCP_Server(char *server_ip,u16 port);
u8 MC20_ClientSendData(u8 *buffer,u32 len);
void MC20_InitConnect(char *server_ip,u16 port);
#endif
五、OneNet创建产品
链接地址: https://open.iot.10086.cn/develop/global/product/#/console


最后
以上就是谨慎歌曲最近收集整理的关于STM32+移远MC20模块采用MQTT协议登录OneNet上传GPS数据一、环境介绍二、MC20模块三、代码功能四、核心代码五、OneNet创建产品的全部内容,更多相关STM32+移远MC20模块采用MQTT协议登录OneNet上传GPS数据一、环境介绍二、MC20模块三、代码功能四、核心代码五、OneNet创建产品内容请搜索靠谱客的其他文章。








发表评论 取消回复