目录
- 1.串口通信
- 2.串口的结构体
- 3.如何配置串口的发送
- 4.通过串口向电脑发送ok字符
- 5.封装发送字符串函数
- 6.重定向printf串口发送
- 7.串口输入控制LED灯开关
1.串口通信
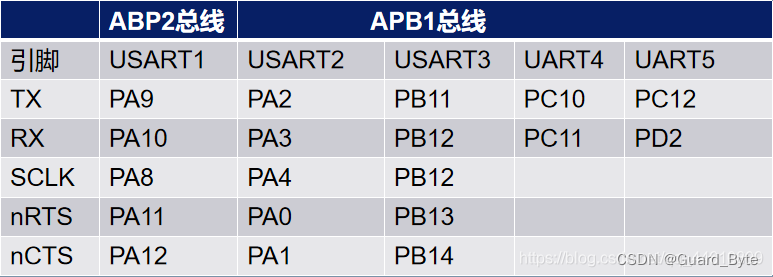
我用的32是stm32f10x最小系统没有UART4和UART5
USART : 通用同步异步收发器
UART : 通用异步收发器
nRTS : 请求发送
nCTS : 请求接收
区别:USART指单片机的一个IO端口模块,可以根据需要配置成同步模式(SPI,IIC),也可以配置成异步模式(UART).可以理解为USART为SPI,IIC对等的”协议”。 UART则不是一个协议,为一个实体。
2.串口的结构体
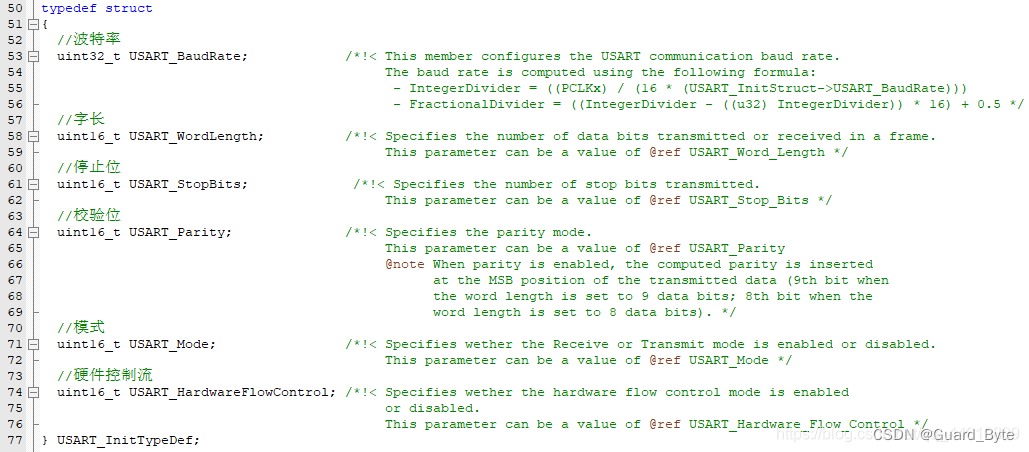

Fck : 串口的时钟(APB1 36M / APB2 72M )
USARTDIV : 无符号的定点数
115200= 72 * 1000000/16 * USARTDIV
3.如何配置串口的发送
1.配置时钟: GPIO口的时钟,串口的时钟, 引脚复用的时钟
2.配置GPIO的结构体
3.配置串口的结构体
4.串口的发送
4.通过串口向电脑发送ok字符
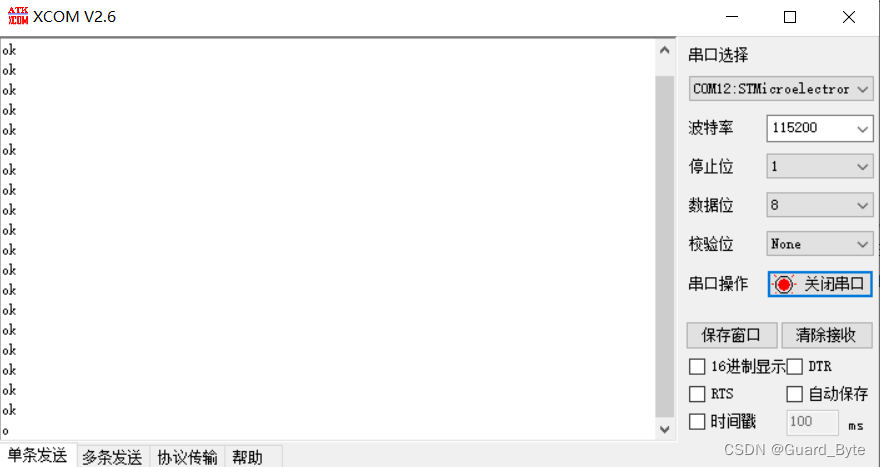
按照上面的四个步骤进行编写
我们会发现只能一个一个发送字符,比较麻烦,所以后面封装了一个可以发送字符串的函数。
usart.c文件
#include "usart.h"
#include "stm32f10x.h"
void usart_init(void)
{
GPIO_InitTypeDef gpio_init;
USART_InitTypeDef usartStruct;
//1.初始化相关时钟以及 IO
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//2.1 TX
gpio_init.GPIO_Mode = GPIO_Mode_AF_PP;
gpio_init.GPIO_Pin = GPIO_Pin_9|;
gpio_init.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&gpio_init);
//2.2 RX
gpio_init.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio_init.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA,&gpio_init);
//3.串口工作模式设置
usartStruct.USART_BaudRate = 115200;
usartStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
usartStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
usartStruct.USART_Parity = USART_Parity_No;
usartStruct.USART_StopBits = USART_StopBits_1;
usartStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&usartStruct);
USART_Cmd(USART1, ENABLE );
}
usart.h文件
#include "stm32f10x.h"
void usart_init(void);
main.c文件
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
#include "exti.h"
#include "usart.h"
int main()
{
usart_init();
while(1)
{
USART_SendData(USART1,'n');
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1,'t');
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
USART_SendData(USART1,'n');
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
delay_ms(1000);
}
}
5.封装发送字符串函数
注意:在封装发送字符串函数时,while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);是为了把数据发送完
usart.c文件
#include "usart.h"
#include "stm32f10x.h"
void usart_init(void)
{
GPIO_InitTypeDef gpio_init;
USART_InitTypeDef usartStruct;
//
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//2.1 TX
gpio_init.GPIO_Mode = GPIO_Mode_AF_PP;
gpio_init.GPIO_Pin = GPIO_Pin_9;
gpio_init.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&gpio_init);
//2.2 RX
gpio_init.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio_init.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA,&gpio_init);
usartStruct.USART_BaudRate = 115200;
usartStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
usartStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
usartStruct.USART_Parity = USART_Parity_No;
usartStruct.USART_StopBits = USART_StopBits_1;
usartStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&usartStruct);
USART_Cmd(USART1, ENABLE );
}
//·发送单个字节
void usartSendByte(USART_TypeDef* USARTx, uint16_t Data)
{
USART_SendData(USARTx,Data);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
//发送字符串
void usartSendStr(USART_TypeDef* USARTx,char *str)
{
uint16_t i = 0;
do{
usartSendByte(USARTx,*(str+i));
i++;
}while(*(str+i) != '�');
while(USART_GetFlagStatus(USART1, USART_FLAG_TC) == RESET);
}
usart.h
#include "stm32f10x.h"
void usart_init(void);
void usartSendByte(USART_TypeDef* USARTx, uint16_t Data);
void usartSendStr(USART_TypeDef* USARTx,char *str);
main.c
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
#include "exti.h"
#include "usart.h"
int main()
{
usart_init();
while(1)
{
usartSendStr(USART1,"nice !rn");
delay_ms(1000);
}
}
6.重定向printf串口发送
要使用printf,我们需要添加#include <stdio.h>头文件(学过c的都应该知道吧)
记得要给下图框住的内容打勾哦
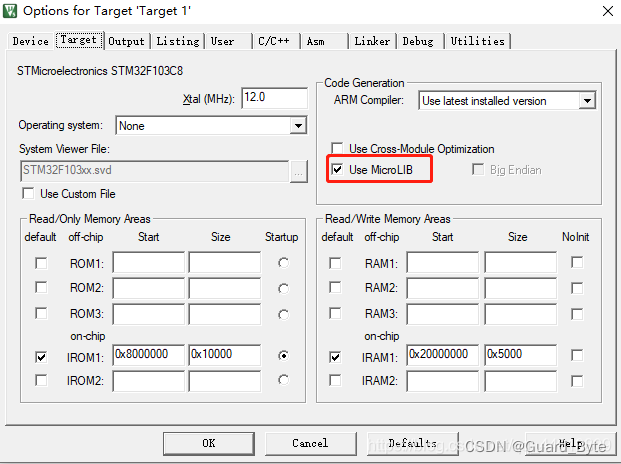
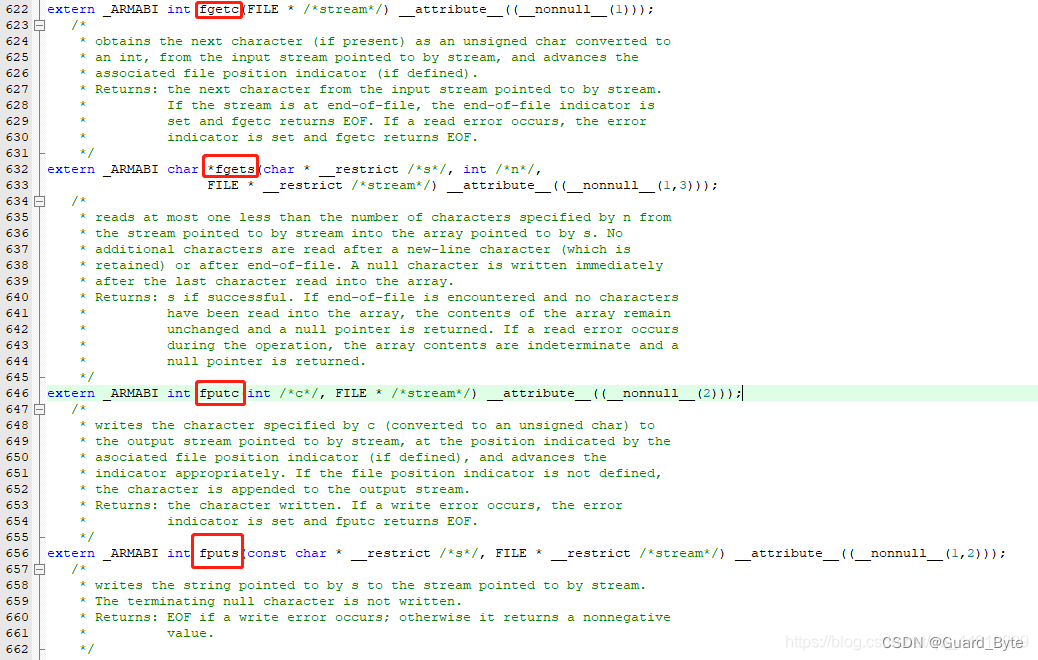
stdio.h文件中有一个宏定义fputc,我们需要使用printf只需要重定向fputc就可以使用啦
usart.h
#include "stm32f10x.h"
#include <stdio.h>
void usart_init(void);
void usartSendByte(USART_TypeDef* USARTx, uint16_t Data);
void usartSendStr(USART_TypeDef* USARTx,char *str);
usart.c
#include "usart.h"
#include "stm32f10x.h"
void usart_init(void)
{
GPIO_InitTypeDef gpio_init;
USART_InitTypeDef usartStruct;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//2.1 TX
gpio_init.GPIO_Mode = GPIO_Mode_AF_PP;
gpio_init.GPIO_Pin = GPIO_Pin_9;
gpio_init.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&gpio_init);
//2.2 RX
gpio_init.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio_init.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA,&gpio_init);
usartStruct.USART_BaudRate = 115200;
usartStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
usartStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
usartStruct.USART_Parity = USART_Parity_No;
usartStruct.USART_StopBits = USART_StopBits_1;
usartStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&usartStruct);
USART_Cmd(USART1, ENABLE );
}
void usartSendByte(USART_TypeDef* USARTx, uint16_t Data)
{
USART_SendData(USARTx,Data);
while(USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET);
}
void usartSendStr(USART_TypeDef* USARTx,char *str)
{
uint16_t i = 0;
do{
usartSendByte(USARTx,*(str+i));
i++;
}while(*(str+i) != '�');
while(USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET);
}
int fputc(int ch,FILE *f)
{
USART_SendData(USART1,(uint8_t)ch);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
return (ch);
}
main.c
#include "stm32f10x.h"
#include "led.h"
#include "delay.h"
#include "exti.h"
#include "usart.h"
#include "stdio.h"
int main()
{
usart_init();
GPIO_SetBits(GPIOA, GPIO_Pin_3);
GPIO_SetBits(GPIOC, GPIO_Pin_13);
while(1)
{
int i = printf("Finnyrn");
printf("%drn",i);
delay_ms(1000);
}
}
图下为什么i不是5而是7呢,因为rn各占了1
重定向fputc不只可以使用printf还可以使用putchar,大伙可以试试呀
7.串口输入控制LED灯开关
输入o让led灯打开并输出Open LED light success,输入c让led灯关闭并输出Close LED light success
提示: main.c中会看见有外部中断的代码,这是之前做震动感应灯的点此进入 STM32 EXTI(外部中断)
led.h
#include "stm32f10x.h"
void Led_init(void);
led.c
#include "stm32f10x.h"
#include "led.h"
void Led_init(void)
{
GPIO_InitTypeDef Led_init;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);
Led_init.GPIO_Mode = GPIO_Mode_Out_PP;
Led_init.GPIO_Pin = GPIO_Pin_13;
Led_init.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOC, &Led_init);
}
usart.h
#include "stm32f10x.h"
#include <stdio.h>
void usart_init(void);
void usartSendByte(USART_TypeDef* USARTx, uint16_t Data);
void usartSendStr(USART_TypeDef* USARTx,char *str);
usart.c
#include "usart.h"
#include "stm32f10x.h"
void usart_init(void)
{
GPIO_InitTypeDef gpio_init;
USART_InitTypeDef usartStruct;
NVIC_InitTypeDef nvic_initStruct;
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//2.1 TX
gpio_init.GPIO_Mode = GPIO_Mode_AF_PP;
gpio_init.GPIO_Pin = GPIO_Pin_9;
gpio_init.GPIO_Speed = GPIO_Speed_10MHz;
GPIO_Init(GPIOA,&gpio_init);
//2.2 RX
gpio_init.GPIO_Mode = GPIO_Mode_IN_FLOATING;
gpio_init.GPIO_Pin = GPIO_Pin_10;
GPIO_Init(GPIOA,&gpio_init);
usartStruct.USART_BaudRate = 115200;
usartStruct.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
usartStruct.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
usartStruct.USART_Parity = USART_Parity_No;
usartStruct.USART_StopBits = USART_StopBits_1;
usartStruct.USART_WordLength = USART_WordLength_8b;
USART_Init(USART1,&usartStruct);
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);
USART_Cmd(USART1, ENABLE );
nvic_initStruct.NVIC_IRQChannel = USART1_IRQn;
nvic_initStruct.NVIC_IRQChannelPreemptionPriority = 1;
nvic_initStruct.NVIC_IRQChannelSubPriority = 1;
nvic_initStruct.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&nvic_initStruct);
}
void usartSendByte(USART_TypeDef* USARTx, uint16_t Data)
{
USART_SendData(USARTx,Data);
while(USART_GetFlagStatus(USARTx, USART_FLAG_TXE) == RESET);
}
void usartSendStr(USART_TypeDef* USARTx,char *str)
{
uint16_t i = 0;
do{
usartSendByte(USARTx,*(str+i));
i++;
}while(*(str+i) != '�');
while(USART_GetFlagStatus(USARTx, USART_FLAG_TC) == RESET);
}
int fputc(int ch,FILE *f)
{
USART_SendData(USART1,(uint8_t)ch);
while(USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
return (ch);
}
int fgetc(FILE *f)
{
while(USART_GetFlagStatus(USART1, USART_FLAG_RXNE) == RESET);
return (int) USART_ReceiveData(USART1);
}
main.c
#include "stm32f10x.h"
#include "led.h"
#include "relay.h"
#include "exti.h"
#include "usart.h"
#include "stdio.h"
int main()
{
Led_init();
Relay_Init();
exti_init();
usart_init();
GPIO_SetBits(GPIOA, GPIO_Pin_3);
GPIO_SetBits(GPIOC, GPIO_Pin_13);
}
void EXTI1_IRQHandler(void)
{
if (EXTI_GetITStatus( EXTI_Line1 ) != RESET)
{
GPIO_ResetBits(GPIOA, GPIO_Pin_3);
usartSendStr(USART1,"Open light successrn");
delay(1000);
GPIO_SetBits(GPIOA, GPIO_Pin_3);
usartSendStr(USART1,"Close light successrn");
}
EXTI_ClearFlag(EXTI_Line1);
}
void USART1_IRQHandler(void)
{
char temp;
if(USART_GetITStatus(USART1,USART_IT_RXNE) != RESET){
temp = USART_ReceiveData(USART1);
if(temp == 'o'){
GPIO_ResetBits(GPIOC, GPIO_Pin_13);
usartSendStr(USART1,"Open LED light successrn");
}
if(temp == 'c'){
GPIO_SetBits(GPIOC, GPIO_Pin_13);
usartSendStr(USART1,"Close LED light successrn");
}
}
}
看原文 点这里

最后
以上就是激动大山最近收集整理的关于STM32串口数据收发 相关配置+点灯控制的全部内容,更多相关STM32串口数据收发内容请搜索靠谱客的其他文章。








发表评论 取消回复