STM32驱动小型4相步进电机(ULN2003+20BYJ46)
在小型和迷你产品应用时,可以用小型步进电机(如20BYJ46)作为运动驱动组件,步进电机本身要求≥5V的 电压供电,而STM32是电压上到3.3V级的芯片,加上驱动电流方面的因素,STM32不能直接驱动小型步进电机,需要串入驱动模块(如ULN2003)进行信号电压转换及承载足够大的驱动电流。
-
驱动模块ULN2003
ULN2003的原理如下所示:
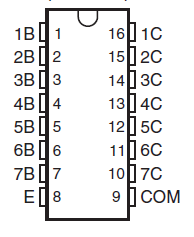
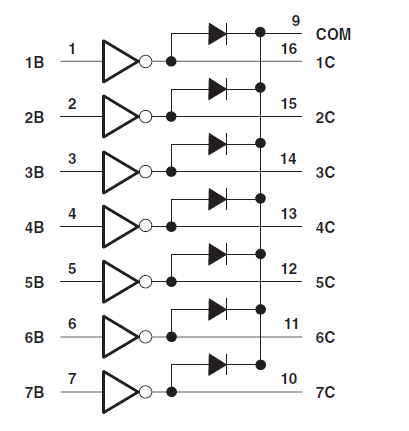
芯片实现从B端向C端的open-drain转换,也即B端输出高,C端输出0电平(接地),而B端输出低,则C端输出高阻;C端接于步进电机的驱动线,步进电机的公共端接到驱动电压(如5V);当C端接地时,步进电机的相线上经过电流。ULN2003本身的COM端是反电势保护端,一般可以接到驱动电压(如5V),当反电势大于驱动电压,电流从驱动电源端走掉,而不经过ULN2003导致内部击穿。
ULN2003模块的原理图如下:
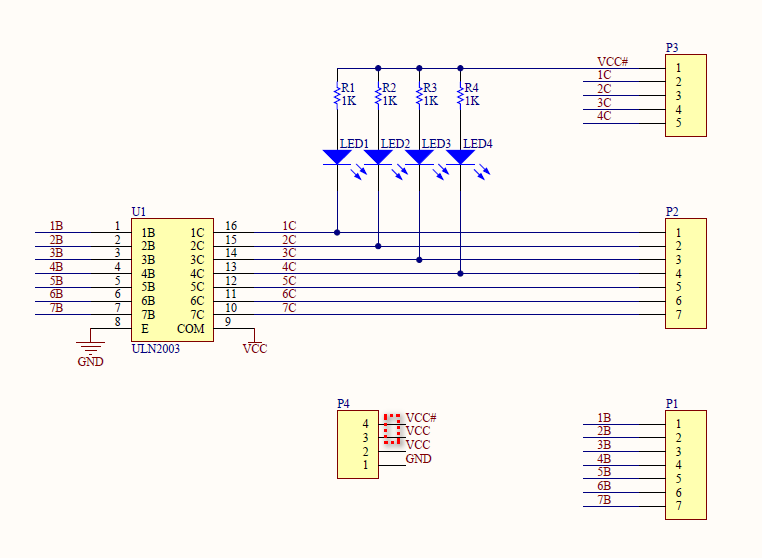
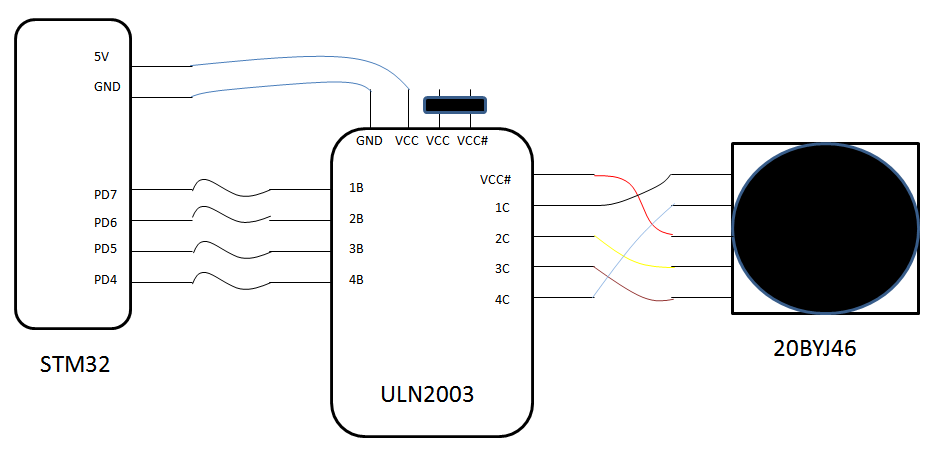
将P4连接器的2端接到驱动电压(如5V),将3和4端通过跳线帽连接,将1端接到地,则完成供电端的连接;注意如果供电和信号控制端不在一起,则需要先将二者共地。ULN2003模块有7组信号转换端口,用1~4组端口作为步进电机的连接端口。2.步进电机20BYJ46
小型5线4相步进电机有多种选型,20BYJ46是其中一种,额定电压为5V。5线中公共端连接驱动电压,而另外4线连接到信号驱动模块。
驱动模块将某一根相线接地,则在步进电机公共端作用下,实现对该相线对驱动。通过不断对驱动相序对转换,实现对步进电机对持续驱动。
4相步进电机的相线标记为A+,A-, B+, B-。建议根据步进电机datasheet里提供的相序进行换相设计,如20BYJ46的驱动时序:
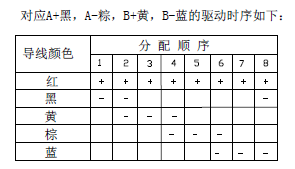
需要注意匹配相线标记和驱动时序。实际上,因为国内出产的一些电机,datasheet可能沿用以前的,实际加工中给步进电机的接线顺序却做了调整,因此需要仔细核对和测试,以确认正确的相线标记。
如这一款20BYJ46,经过实际测试,正确的步进电机相线标记为:A+蓝,A-黑,B+棕,B-黄。3.STM32开发板NUCLEO-F767ZI
采用各类型STM32开发板连接ULN2003都可以进行步进电机的驱动代码设计。这里以NUCLEO-F767ZI和STM32CUBEIDE环境为例说明。
NUCLEO-F767ZI本身自带ST-LINK小板,并USB复用连接到STM32F67的UART3串口,这里以UART3串口作为命令接口。
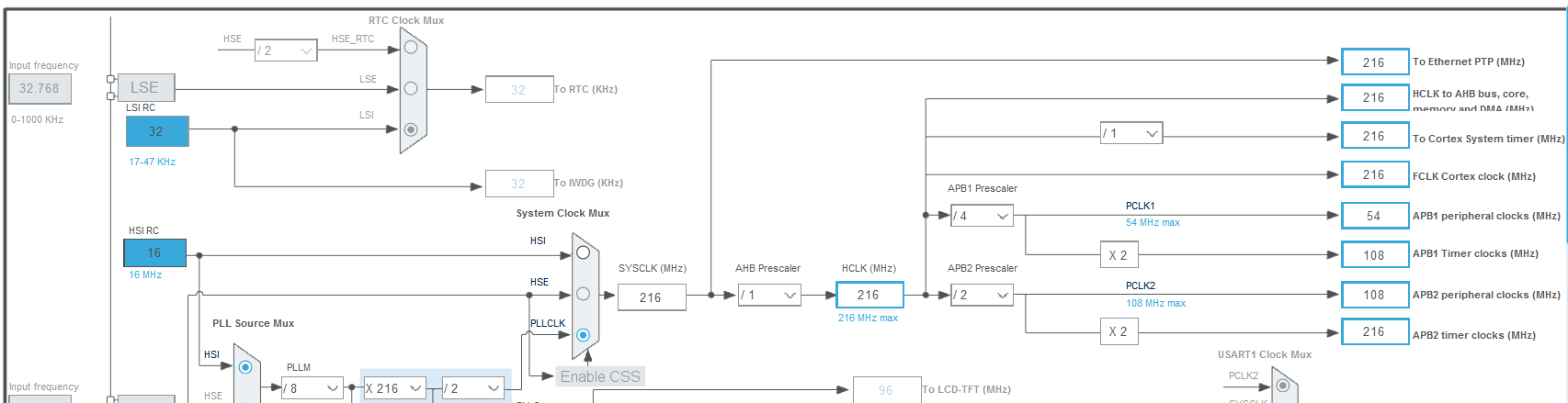
首先,配置工程的时钟:
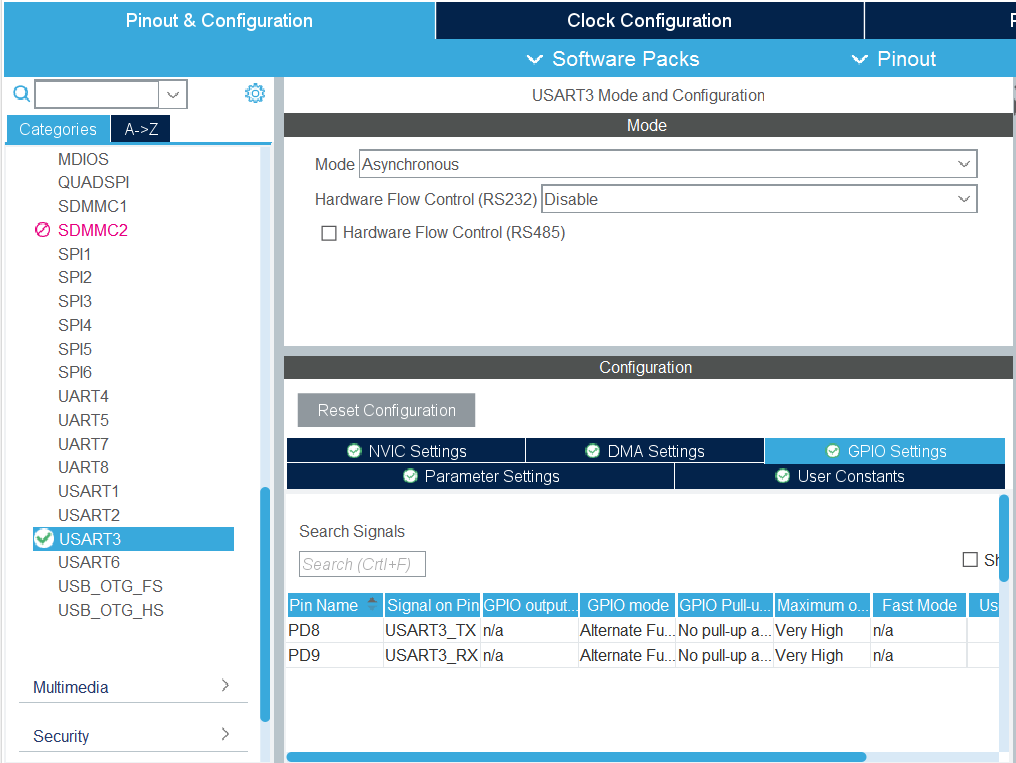
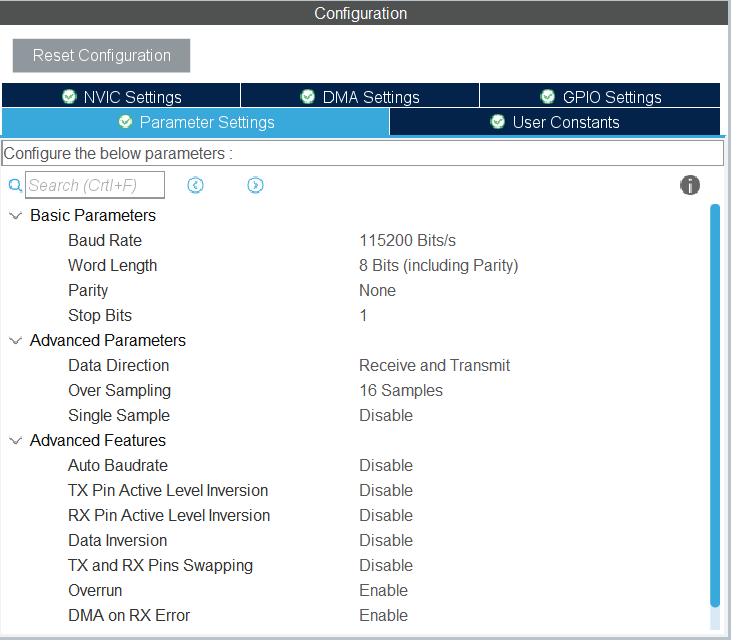
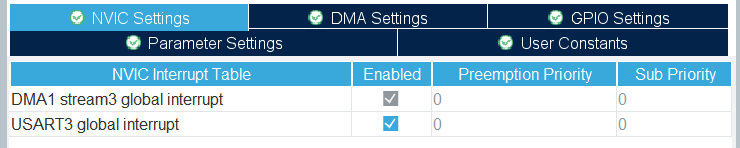
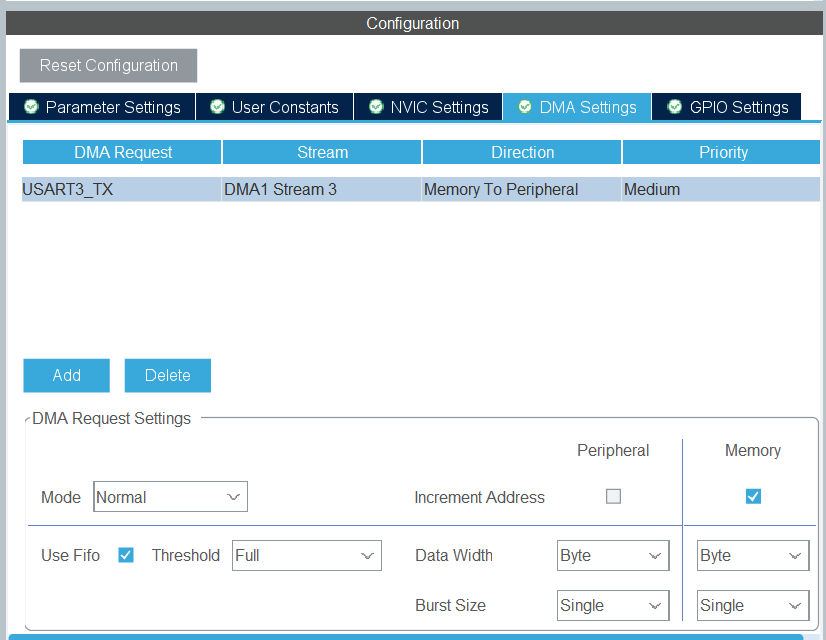
然后,配置通讯串口:
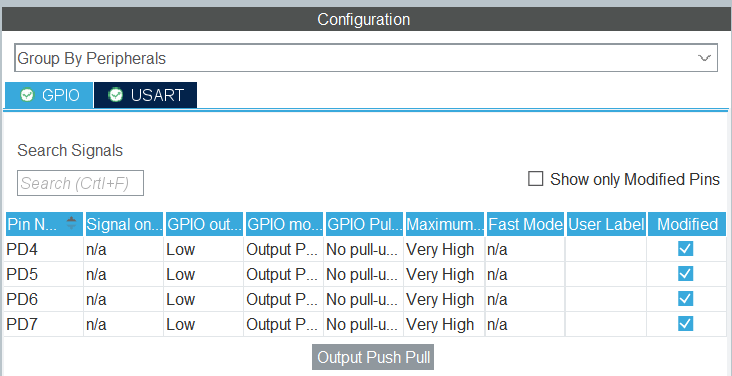
继续,配置PD4~PD7作为输出GPIO,默认输出低电平,并在硬件上连接到ULN2003模块的B端口。
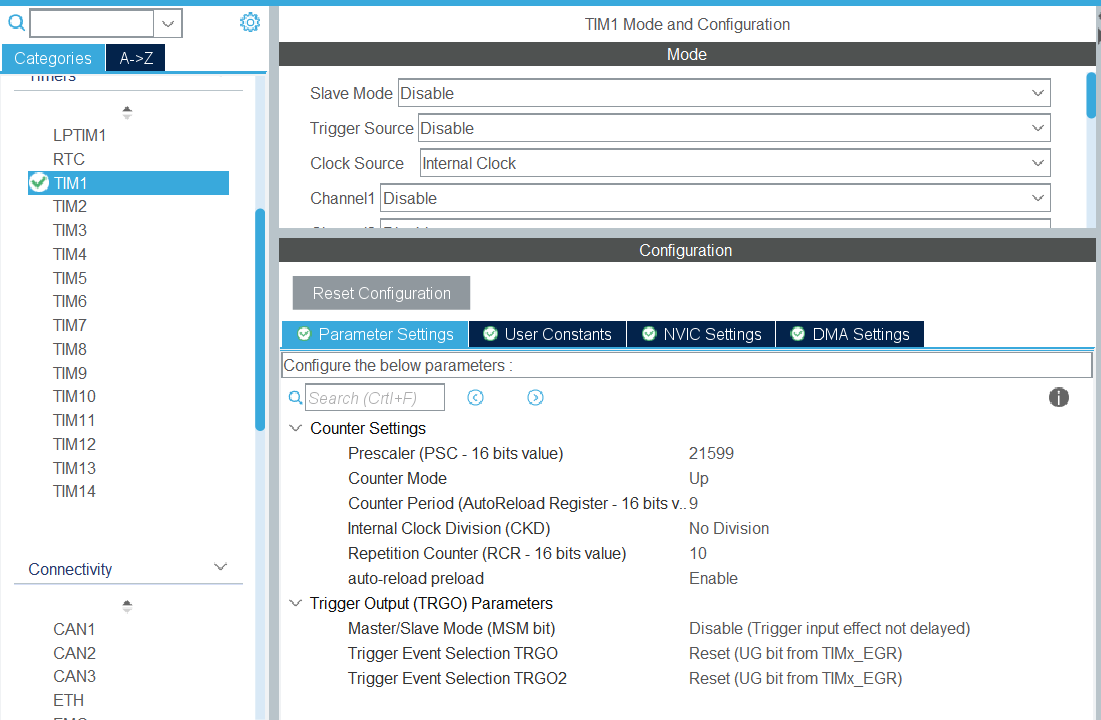
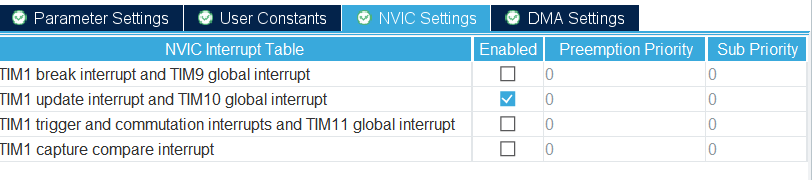
打开TIM1定时器,并设置允许中断,之后STM32程序会在每个中断到来时,进行输出相位切换。这里先设置为10ms产生一次中断,即10ms运行一步。
-
STM32代码的实现
代码实现功能:- 通过串口接收数据0停止步进电机
- 通过串口接收数据1向正方向转动
- 通过串口接收数据2向反方向转动
- 识别当前的相位,并根据方向指示,进行换向
完整的代码如下:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* <h2><center>© Copyright (c) 2021 STMicroelectronics.
* All rights reserved.</center></h2>
*
* This software component is licensed by ST under BSD 3-Clause license,
* the "License"; You may not use this file except in compliance with the
* License. You may obtain a copy of the License at:
* opensource.org/licenses/BSD-3-Clause
*
******************************************************************************
*/
/* Written by Pegasus Yu @ 2021-07-11
* 20BYJ46 4-phase stepper motor:
* reduction ratio: 1/85
* step angle: 7.5°
* 4080 pulses for 1 circle
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
uint32_t free_time_delay;
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim1;
UART_HandleTypeDef huart3;
DMA_HandleTypeDef hdma_usart3_tx;
/* USER CODE BEGIN PV */
uint8_t Uart_RxBuff;
uint8_t txd[100]={0};
uint8_t start_flag=0;
uint8_t motor_dir = 0;
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_DMA_Init(void);
static void MX_USART3_UART_Init(void);
static void MX_TIM1_Init(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_DMA_Init();
MX_USART3_UART_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
HAL_UART_Receive_IT(&huart3, &Uart_RxBuff, 1);
HAL_TIM_Base_Start_IT(&htim1);
/*rotate 8-step*/
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_4, GPIO_PIN_SET);
//1
free_time_delay = 120*100; while(--free_time_delay>0);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_5, GPIO_PIN_SET);
//2
free_time_delay = 120*100; while(--free_time_delay>0);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_4, GPIO_PIN_RESET);
//3
free_time_delay = 120*100; while(--free_time_delay>0);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_6, GPIO_PIN_SET);
//4
free_time_delay = 120*100; while(--free_time_delay>0);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_5, GPIO_PIN_RESET);
//5
free_time_delay = 120*100; while(--free_time_delay>0);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_7, GPIO_PIN_SET);
//6
free_time_delay = 120*100; while(--free_time_delay>0);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_6, GPIO_PIN_RESET);
//7
free_time_delay = 120*100; while(--free_time_delay>0);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_4, GPIO_PIN_SET);
//8
free_time_delay = 120*100; while(--free_time_delay>0);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_7, GPIO_PIN_RESET);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
RCC_PeriphCLKInitTypeDef PeriphClkInitStruct = {0};
/** Configure the main internal regulator output voltage
*/
__HAL_RCC_PWR_CLK_ENABLE();
__HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLM = 8;
RCC_OscInitStruct.PLL.PLLN = 216;
RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
RCC_OscInitStruct.PLL.PLLQ = 2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Activate the Over-Drive mode
*/
if (HAL_PWREx_EnableOverDrive() != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_7) != HAL_OK)
{
Error_Handler();
}
PeriphClkInitStruct.PeriphClockSelection = RCC_PERIPHCLK_USART3;
PeriphClkInitStruct.Usart3ClockSelection = RCC_USART3CLKSOURCE_PCLK1;
if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInitStruct) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief TIM1 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 21599;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 9;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 10;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_ENABLE;
if (HAL_TIM_Base_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;
if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterOutputTrigger2 = TIM_TRGO2_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
}
/**
* @brief USART3 Initialization Function
* @param None
* @retval None
*/
static void MX_USART3_UART_Init(void)
{
/* USER CODE BEGIN USART3_Init 0 */
/* USER CODE END USART3_Init 0 */
/* USER CODE BEGIN USART3_Init 1 */
/* USER CODE END USART3_Init 1 */
huart3.Instance = USART3;
huart3.Init.BaudRate = 115200;
huart3.Init.WordLength = UART_WORDLENGTH_8B;
huart3.Init.StopBits = UART_STOPBITS_1;
huart3.Init.Parity = UART_PARITY_NONE;
huart3.Init.Mode = UART_MODE_TX_RX;
huart3.Init.HwFlowCtl = UART_HWCONTROL_NONE;
huart3.Init.OverSampling = UART_OVERSAMPLING_16;
huart3.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;
huart3.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;
if (HAL_UART_Init(&huart3) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN USART3_Init 2 */
/* USER CODE END USART3_Init 2 */
}
/**
* Enable DMA controller clock
*/
static void MX_DMA_Init(void)
{
/* DMA controller clock enable */
__HAL_RCC_DMA1_CLK_ENABLE();
/* DMA interrupt init */
/* DMA1_Stream3_IRQn interrupt configuration */
HAL_NVIC_SetPriority(DMA1_Stream3_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Stream3_IRQn);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOD_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7, GPIO_PIN_RESET);
/*Configure GPIO pins : PD4 PD5 PD6 PD7 */
GPIO_InitStruct.Pin = GPIO_PIN_4|GPIO_PIN_5|GPIO_PIN_6|GPIO_PIN_7;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;
HAL_GPIO_Init(GPIOD, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *UartHandle)
{
if(UartHandle==&huart3)
{
HAL_UART_Transmit_DMA(&huart3, &Uart_RxBuff, 1);
if(Uart_RxBuff==1)
{
motor_dir=0;
if (start_flag==0) start_flag=1;
}
else if(Uart_RxBuff==2)
{
motor_dir=1;
if (start_flag==0) start_flag=1;
}
else if(Uart_RxBuff==0)
{
start_flag=0;
}
else;
HAL_UART_Receive_IT(&huart3, &Uart_RxBuff, 1);
}
}
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==&htim1)
{
if(start_flag==0)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_4, GPIO_PIN_SET);
}
else
{
if(motor_dir==0)
{
if(start_flag==1)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_5, GPIO_PIN_SET);
}
else if(start_flag==2)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_4, GPIO_PIN_RESET);
}
else if(start_flag==3)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_6, GPIO_PIN_SET);
}
else if(start_flag==4)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_5, GPIO_PIN_RESET);
}
else if(start_flag==5)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_7, GPIO_PIN_SET);
}
else if(start_flag==6)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_6, GPIO_PIN_RESET);
}
else if(start_flag==7)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_4, GPIO_PIN_SET);
}
else if(start_flag==8)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_7, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_4, GPIO_PIN_SET);
}
start_flag++;
if(start_flag==9) start_flag=1;
}
else if(motor_dir==1)
{
if(start_flag==1) start_flag=8;
else start_flag--;
if(start_flag==1)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_5, GPIO_PIN_SET);
}
else if(start_flag==2)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_4, GPIO_PIN_RESET);
}
else if(start_flag==3)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_6, GPIO_PIN_SET);
}
else if(start_flag==4)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_5, GPIO_PIN_RESET);
}
else if(start_flag==5)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_7, GPIO_PIN_SET);
}
else if(start_flag==6)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_6, GPIO_PIN_RESET);
}
else if(start_flag==7)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_4, GPIO_PIN_SET);
}
else if(start_flag==8)
{
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_7, GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD, GPIO_PIN_4, GPIO_PIN_SET);
}
}
else;
}
}
}
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %drn", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
/************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/
实际的接线图如下所示:
基于STM32CUBEIDE开发环境的HAL库例程:
https://download.csdn.net/download/hwytree/20197561
-End-
最后
以上就是高高小土豆最近收集整理的关于STM32驱动小型4相步进电机(ULN2003+20BYJ46)STM32驱动小型4相步进电机(ULN2003+20BYJ46)的全部内容,更多相关STM32驱动小型4相步进电机(ULN2003+20BYJ46)STM32驱动小型4相步进电机(ULN2003+20BYJ46)内容请搜索靠谱客的其他文章。








发表评论 取消回复