一 绘制线形
ROS中查看数据,绘制线形,第一想法便是rqt_plot,并且配合着parameter server可以实现在线调参等高级功能.然而对于录制好的rosbag数据,rqt_plot稍有些不够灵活,首先需要启动roscore,然后需要rosbag play回放完数据才能得到线形.有没有更灵活,线下处理rosbag,抽取感兴趣数据的工具?本文介绍PlotJuggler.
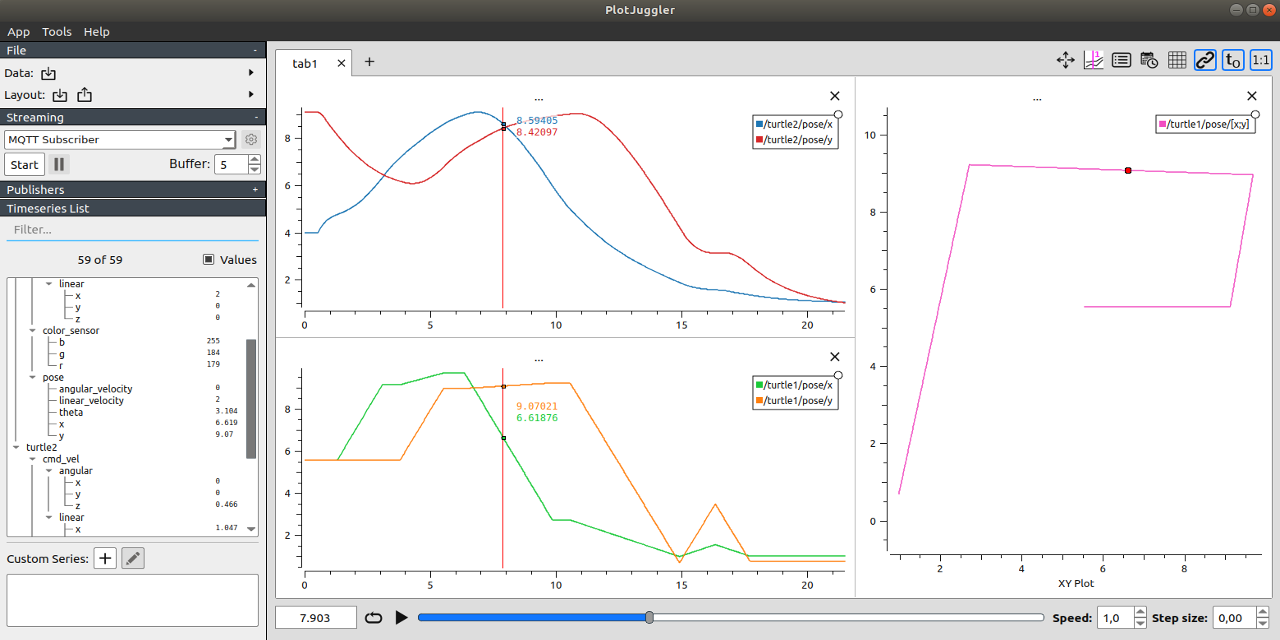
PlotJuggler
安装
下面才是ubuntu16.04的安装步骤,也很简单,就三步。
sudo apt-get install qtbase5-dev libqt5svg5-dev ros-kinetic-ros-type-introspectionsudo apt-get install ros-kinetic-plotjugglerrosrun plotjuggler PlotJuggler
特点及使用
- 多个绘图窗口:可以按行/列排列分窗口,并且每个分窗口都有独立的标签选项.
- 离线读取rosbag,也支持在线读取ros message.
- 缩放简单:例如鼠标滚轮缩放,左键拉选框放大等,还可以锁定所有图的X轴.
- 保存/加载页面布局
- 快捷键Undo/Redo
- 方便地导入/导出csv
- 展示多个topics的数据,只需要拖拽到绘图窗口即可
- 还可以re-publish message
- 所有的功能可以通过标签选项很快明白,非常容易上手.
最后
以上就是跳跃八宝粥最近收集整理的关于ROS常见开源工具总结的全部内容,更多相关ROS常见开源工具总结内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复