第五章 数字输入输出系统设计
文章目录
- 第五章 数字输入输出系统设计
- 学习目标
- 重要内容
- 通用输入输出端口
- GPIO基本工作模式
- GPIO端口保护
- GPIO端口的中断
- STM32F10x的GPIO相关寄存器
- GPIO的使能
- GPIO地址映射
- GPIO汇编指令的操作方法
- 汇编语言操作
- GPIO寄存器操作
- GPIO固件库函数操作方法
- GPIO_Init()使用的参量
- 实例
- 汇编语言
- 寄存器
- 固件库函数
- 其他例子
- 数字信号的逻辑电平转换
- 需要数字逻辑电平转换的原因
- 常用的转换方法
学习目标
- 掌握GPIO基本知识(重点工作模式)*
- 熟练掌握GPIO三种基本操作方法*
- 熟悉数字信号的逻辑电平及其转换
- 了解数字输入输出接口的扩展
- 熟悉输入输出接口的一般结构
- 熟练掌握常用人机通道的原理及应用
重要内容
- 1、GPIO的基本特性:输入缓冲、输出锁存
- 2、GPIO工作模式:高阻(浮空)输入、开漏、推挽输出,上下拉输入、双向输入输出
- 3、GPIO中断类型及用途
- 4、GPIO配置寄存器及工作方式编程(汇编、寄存器及固件库方式)
- 5、GPIO输入数据寄存器和输出数据寄存器编程(汇编、寄存器及固件库方式)
- 6、知晓逻辑电平为何要变换,有哪些方法
- 7、简单人机交互接口的应用(发光管、按键)
通用输入输出端口
GPIO端口(General Purpose Input Output Port)即通用输入/输出端口,是可编程的通用并行I/O接口,主要用于需要数字量输入/输出的场合。
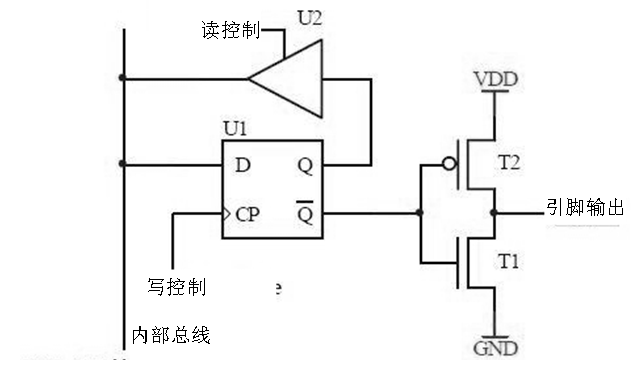
主要特点:输入缓冲、输出缓存
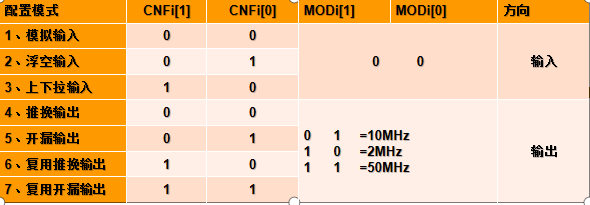
GPIO基本工作模式
- 高阻输入模式
- 由于三态门控制输入状态的读取,在读无效时呈高阻状态
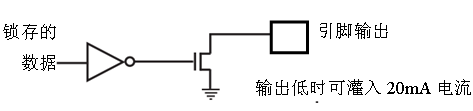
- 开漏输出模式
- 在普通输出模式基础上,使输出MOS管的漏极开路的一种输出方式。
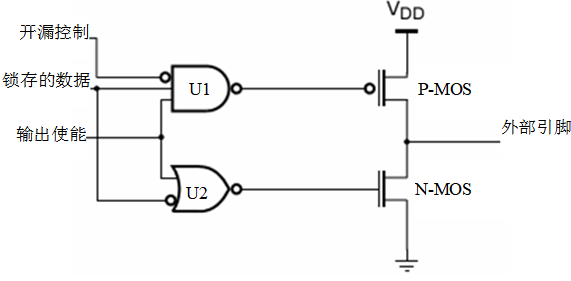
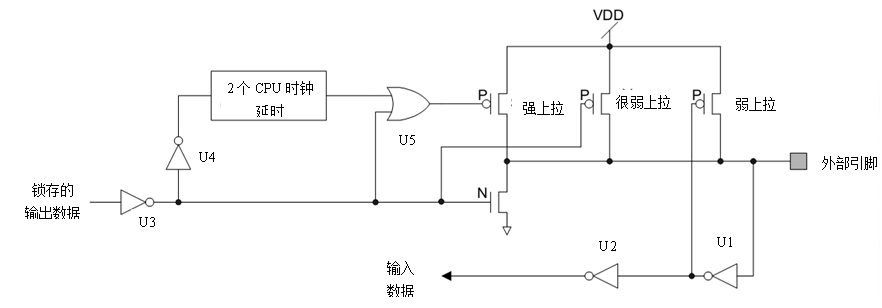
- 推挽输出模式
- GPIO推挽输出是指输出端口采用推挽放大电路以输出更大的电流。
- 准双向I/O模式
- GPIO的准双向I/O模式就是可以在需要输入的时候读外部的数据(输入),需要输出的时候就向端口发送数据
- 端口的上下拉
- GPIO的引脚内部可配置为上拉或下拉,如果内部没有配置方式,则可以外接上拉电阻或下拉电阻。所谓上拉指的是引脚与电源VDD或VCC之间接一个大小100K左右的电阻,下拉指的是引脚与负电源VSS或地GND之间接一个100K左右的电阻。
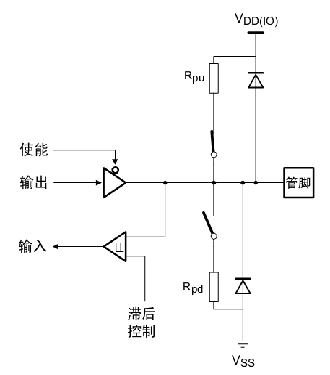
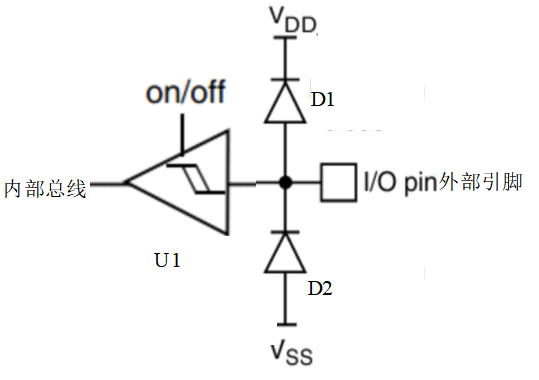
GPIO端口保护
- 采用二极管钳位的方式来保护
- 采用ESD器件的方式保护
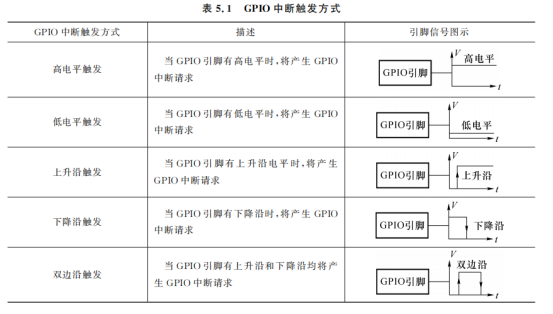
GPIO端口的中断
MCU在处理其他事务时,靠不断查询引脚的状态,效率是低下的,采用中断机制解决问题。
当引脚有变化时产生一个中断请求,微控制器在中断服务程序中去做相应引脚中断的处理任务,从而提高了效率。
STM32F10x的GPIO相关寄存器
- 两个32位配置寄存器:配置输入输出模式和输出频率
- GPIOx_CRL
- GPIOx_CRH
-
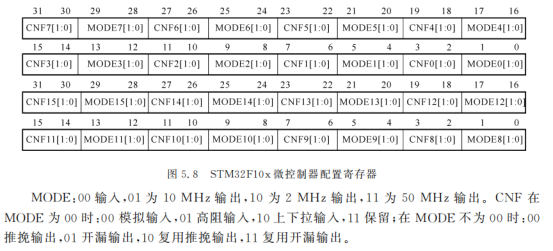
- 注意:上拉时:除了CNF=10,ODR中相应位要置为1,下拉时置为0!
- 两个32位数据寄存器:存放输入16数据和数据数据(高位保留)
- 输入寄存器GPIOx_IDR
- 输出寄存器GPIOx_ODR
- 两个32置复位寄存器:置位指定引脚,复位指定引脚
- 32位置位/复位寄存器(GPIOx_BSRR)
- 16位复位寄存器(GPIOx_BRR)
- 一个32位锁定寄存器:锁存数据,一般很少使用
- GPIOx_LCKR
GPIO的使能
GPIO连接在APB2总线上,使用RCC寄存器来选择是否打开
GPIO地址映射

GPIO汇编指令的操作方法
汇编语言操作
初始化GPIOx端口:
LDR Rn,=GPIOx_CRL or GPIO_CRH
LDR Ri,=Command
STR Ri,[Rn] ;写控制寄存器初始化GPIOx端口
读GPIOx端口数据:
LDR Rn,=GPIOx_IDR
LDRH Ri,[Rn]
写数据到GPIOx端口:
LDR Rn,=GPIOx_ODR
LDR Ri,=Data
STRH Ri,[Rn]
GPIO寄存器操作
GPIOx_CRL配置寄存器: GPIOx->CRL 如GPIOA->CRL
GPIOx_CRH配置寄存器: GPIOx->CRH 如GPIOB->CRH
GPIOx_IDR输入数据寄存器: GPIOx->IDR 如GPIOC->IDR
GPIOx_ODR输入数据寄存器: GPIOx->CRL 如GPIOD->ODR
初始化GPIOx端口:
GPIOx->CRL=Command;//写控制寄存器L初始化GPIOx端口
GPIOx->CRH=Command;//写控制寄存器H初始化GPIOx端口
读GPIOx端口数据:
u16 DataP;
DataP=GPIOx->IDR;
写数据到GPIOx端口:
GPIOx->ODR=data;//data为16位无符号数
GPIO固件库函数操作方法
一、初始化GPIO端口
1、用RCC_APB2PeriphClockCmd()函数使能GPIO时钟
2、用GPIO_Init()函数初始化GPIO端口
二、读GPIO端口数据
1、用GPIO_ReadInputDataBit()函数读取指定GPIO引脚的电平状态
2、用GPIO_ReadInputData()函数读取指定GPIO整个端口的16位数据
三、写GPIO端口数据
1、用GPIO_SetBits()函数置位多个指定I/O引脚(高电平输出)
2、用GPIO_ResetBits()函数复位多个指定I/O引脚(低电平输出)
3、用GPIO_WriteBit()函数写指定一个I/O引脚高低电平
4、用GPIO_Write()函数写指定一个完整GPIO端口16位数据
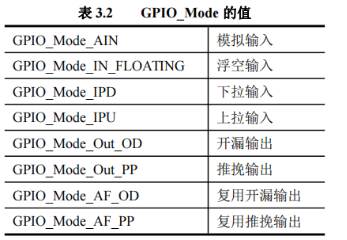
GPIO_Init()使用的参量
一、输出时
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_n;//n=0~15定义引脚
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;//输出频率10MHz,2MHz,50MHz
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;//输出工作模式
GPIO_Init(GPIOx, &GPIO_InitStructure);//调用初始化GPIO函数
二、输入时
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_n;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPU;//输入工作模式
GPIO_Init(GPIOx, &GPIO_InitStructure);
引脚定义:可多个引脚合并定义,中间用|,如GPIO_Pin_1|GPIO_Pin_2
输入工作模式:
GPIO_Mode_AIN 模拟输入
GPIO_Mode_IN_FLOATING 浮空输入
GPIO_Mode_IPD 下拉输入
GPIO_Mode_IPU 上拉输入
输出模式:
GPIO_Mode_Out_OD 开漏输出
GPIO_Mode_Out_PP 推挽输出
GPIO_Mode_AF_OD 多功能开漏输出
GPIO_Mode_AF_PP 多功能推挽输出
实例
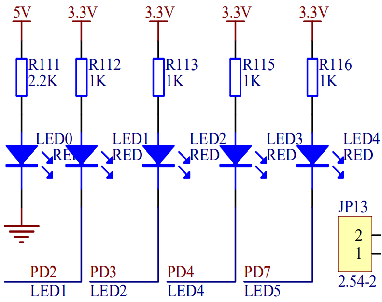
如图所示,写出除使能GPIO时钟外,让LED1和LED4亮,LED2和LED5灭的汇编语言程序
片段。
APB2时钟使能寄存器RCC地址:0x40021018
GPIOD_CRL地址=0x40011400
GPIOD_CRH地址=0x40011404
GPIOD_ODR地址=0x4001140C
汇编语言
LDR R0,=0x40011400 ;GPIOD_CRL
LDR R1,[R0] ;加载控制寄存器到R1
LDR R2,=0x20022200 ;选择PD2,PD3,PD4,PD7为2MHz推挽输出,其它为输入
ORRS R1,R1,R2 ;#0x20022200=0010 0000 0000 0010 0010 0010 0000 0000
LDR R2,=0x2FF222FF
ANDS R1,R1,R2 ;#0x2FF222FF=0010 1111 1111 0010 0010 0010 1111 1111
STR R1,[R0] ;写到控制寄存器CRL中
LDR R0,=0x4001140C ;GPIOD_ODR
LDR R1,[R0]
ANDS R1,R1,#0xEB ;1110 1011
ORRS R1,R1,#0x88 ;1000 1000
STRH R1,[R0] ;写入输出数据寄存器ODR
寄存器
u32 CtrlPort=0;
CtrlPort=GPIOD->CRL;//取CRL值
CtrlPort|=0x20022200;
CtrlPort&=0x2FF222FF;
GPIOD->CRL=CtrlPort;
GPIOD->ODR|=(1<<3)|(1<<7);
GPIOD->ODR&=~(1<<2)&~(1<<4);
固件库函数
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOD, ENABLE); GPIO_InitStructure.GPIO_Pin=GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_7;/*PD2/3/4/7为输出引脚*/
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_2MHz; /*速度2MHz*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; /*推挽输出*/
GPIO_Init(GPIOD, &GPIO_InitStructure); /*初始化GPIOD端口*/
GPIO_SetBits(GPIOD,GPIO_Pin_3|GPIO_Pin_7); /*PD3:LED2、PD7:LED5为1灭*/
GPIO_ResetBits(GPIOD,GPIO_Pin_2|GPIO_Pin_4); /*PD2:LED1、PD4:LED4为0亮*/
其他例子
【例5.1】假设PD2、PD3、PD4和PD7为推挽输出作为LED发光二极管(LED1~LED4)输出控制,0亮,1灭,PD11、PD12、PC13和PA0为上拉输入,作为KEY1~KEY4四个按键输入,设置各PORTA、PORTC和PORTD工作频率为10MHz出。并让LD1~LD4全部灭。
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA | RCC_APB2Periph_GPIOC
|RCC_APB2Periph_GPIOD, ENABLE); /*使能GPIOA,C,D端口时钟*/
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_11|GPIO_Pin_12; /*PD11/12输入*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;/*高阻输入*/
GPIO_Init(GPIOD, &GPIO_InitStructure); /*初始化GPIOD端口*/
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 ;
GPIO_Init(GPIOC, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 ;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4|GPIO_Pin_7;//PD2/3/4/7入
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz; /*速度10MHz*/
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; /*推挽输出*/
GPIO_Init(GPIOD, &GPIO_InitStructure); /*初始化GPIOD端口*/
GPIO_SetBits(GPIOD,GPIO_Pin_2|GPIO_Pin_3| GPIO_Pin_4| GPIO_Pin_7|); /*PD2:LED1、PD3:LED3、PD4:LED3、PD7:LED4全为1灭*/
数字信号的逻辑电平转换
需要数字逻辑电平转换的原因
不同逻辑电平之间如果不进行逻辑电平的变换,由于逻辑电平的不一致,使发送的 0 和 1 信息到达接收端无法正确识别 0 和 1 逻辑信息,即无法进行正确地相互交互,因此对于不同逻辑电平必须进行逻辑电平的转换方能连接。
常用的转换方法
- (1)限流电阻加钳位二极管方式进行同逻辑电平转换接口
- (2)用电阻与三极管构成的逻辑电平转换接口
- (3)仅用两只电阻组成的逻辑电平转换接口
- (4)用专用逻辑电平转换芯片进行逻辑电平转换
- (5)采用光电耦合器实现逻辑电平隔离转换
最后
以上就是跳跃八宝粥最近收集整理的关于【嵌入式系统原理与应用】南航嵌入式 第五章—— 数字输入输出系统设计的全部内容,更多相关【嵌入式系统原理与应用】南航嵌入式内容请搜索靠谱客的其他文章。








发表评论 取消回复