
什么是ROS
ROS(Robot Operating System)是一个机器人软件平台。
ROS的前身是斯坦福人工智能实验室为了支持斯坦福智能机器人STAIR而建立的交换庭(switchyard)项目。
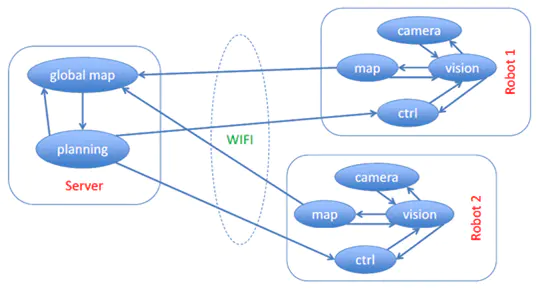
ROS是基于一种图状架构,从而不同节点的进程能接受,发布,聚合各种信息(例如传感,控制,状态,规划等等)。目前ROS主要支持Ubuntu。
ROS可以分成两层,低层是上面描述的操作系统层,高层则是广大用户群贡献的实现不同功能的各种软件包,例如定位绘图,行动规划,感知,模拟等等。
以下来自ROS wiki的描述:
ROS的主要特点
ROS不是一种编程语言
ROS的主要代码由C++语言编写。但客户端库的编写还可以使用Python4、Java5和Lisp6等其他多种语言编写。
ROS 不仅是一个函数库
除包含客户端库(Client Libraries)外,还包含一个中心服务器(Central Server)、一系列命令行工具、图形化界面工具以及编译环境。
ROS不是集成开发环境
几乎所有的主流IDE都可用于基于ROS的软件开发,甚至可以使用普通的文本编辑器和命令行来完成相应的开发,而无需任何IDE。
特点
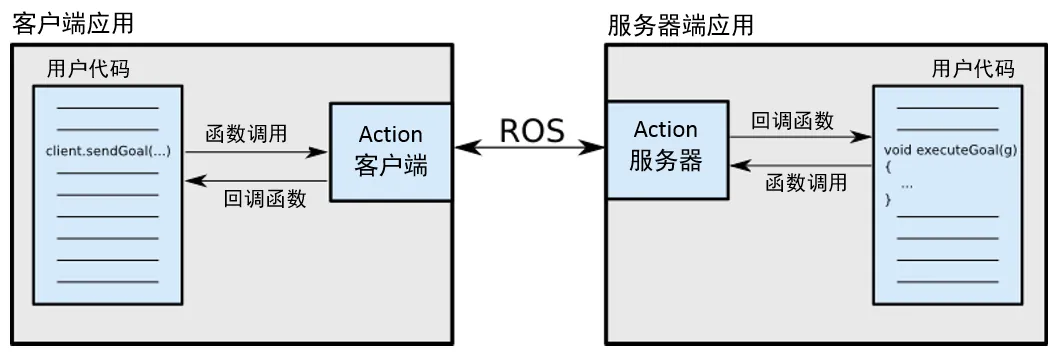
ROS是一种使用ROS通信模块实现模块间P2P的松耦合的网络连接的处理架构,它执行若干种类型的通讯,包括基于服务的同步RPC(远程过程调用)通讯、基于Topic的异步数据流通讯,还有参数服务器上的数据存储。但是ROS本身并没有实时性。
ROS发布版本介绍

最后
以上就是俭朴泥猴桃最近收集整理的关于ROS2学习笔记之ROS介绍的全部内容,更多相关ROS2学习笔记之ROS介绍内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复