ROS编程的一大特点就是基于通信的编程。
为了提供一种服务,很多时候在同一个框架里编写很多程序:从传感器或舵机的硬件驱动到传感、识别和动作等所有种类的程序。但为了重用机器人软件,根据每个处理器的用途将其分成更小的部分。
根据平台的不同,我们将此称为组件化或节点化。必须由划分为最小执行单元的节点之间发送和接收数据,而平台具有关于该数据通信的所有一般信息。而且,这与最小的单位进程连接到网络的物联网(IoT)的概念一致,因此可以用作物联网平台。并且,被划分成最小执行单元的程序可以进行小单元的调试,这非常有助于找出错误。
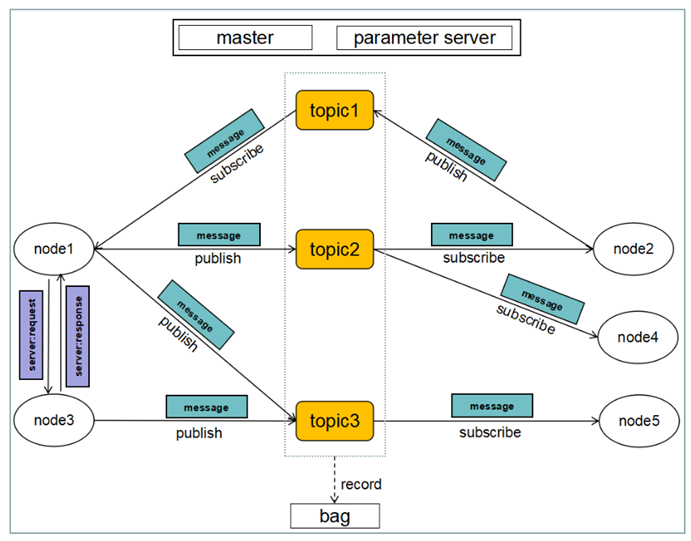
我们可以从下图形象生动地看到这种编程方式的拓扑图。ROS会创建一个连接所有进程(节点) 的网络,其中的任何节点都可以访问此网络,并通过该网络与其他节点交互,获取其他节点发布的信息,并将自身数据发布到网络上,这个计算图网络中的节点(node)、主题(topic)、服务(server等都要有唯一的名称做标识。
上文中加粗的部分就是ROS中的重要概念,我们要理解并且记住。
最后
以上就是清秀大门最近收集整理的关于ROS编程的特点:基于通信的程序的全部内容,更多相关ROS编程内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复