在此之前最好是学过一些STM32单片机知识。
本文内容针对于初学者,请大佬勿喷勿笑。
修改日志:
2022/8/28
修改文章结构,原计划的多篇文章介绍,改为一整篇介绍。
填充了一些内容。
本文目录
- 前言
- 材料准备
- 一、硬件
- 二、软件
- 前期知识储备与试验
- 一、用STM32让电机转起来(L298N或TB6612)
- (一)、两种常用的电机驱动的简单了解
- 1. L298N
- 2.TB6612
- (二)、驱动电机代码
- 1.说明
- 2.代码部分
- 3.以上代码对应的接线
- 二、手机通过蓝牙与小车通信
- (一)、配置蓝牙模块
- (二)、手机通过蓝牙与单片机通信
- 三、麦科勒姆轮的运动分析
- 开始上手
- 完成 >v<
- 总结
前言
制作一个小车。对于有的同学来说是一件轻轻松松的事情,但有的同学却一脸懵逼,不知道如何下手,这篇教程将会教会你如何制作一辆手机遥控的麦科勒姆轮小车。
由于麦科勒姆轮轮胎结构的特殊性,对于已经完整制作过普通小车的同学来说,制作一辆麦科勒姆轮小车的关键点就在对其的运动分析。
制作一个小车对于有的同学来说那简直是so easy!但是,我并不觉得它就是那种只动动手指就可以完成的事情,想要从无到有的完成一个完整的项目,除了需要具备一定的专业知识外,还需要知道如何将他们融会贯通,考虑周全又恰到好处。比如,有的同学画车板由于没有考虑一些细节导致模型改了一次又一次,又例如有的同学由于电路设计的不合理导致短路烧芯片的,等等一些都是需要我们去注意的。
材料准备
一、硬件
1.stm32c8t6单片机。片上资源完全够用
2.HC_05或者HC_06。建议05吧,感觉好配置一些,反正我配置06是奔溃了的>_<。
3.车板,电机,轮胎。去tb买吧,不到一百块钱,有的都是配好的配件。当然有条件的可以激光切割或者3D打印什么的>o<。
4.电机驱动。我用的是四路的L298N驱动模块,虽然有一点不小巧,但是功能多,是真的香。
5.电源。我用的是航模电池。
6.下载器。我用的是st_link。
7.杜邦线若干
二、软件
1.keil软件。这个应该是必备。
下面链接是一些可能用到的软件,有需要自取,代码可能后续添加。
链接:https://pan.baidu.com/s/1rdvt8SEETCotwg3Ba0DWEQ
提取码:a8jw
前期知识储备与试验
一、用STM32让电机转起来(L298N或TB6612)
本节学习驱动模块的使用方法,并且让小电机转动起来。
这里介绍两种常用的电机驱动模块,L298N和TB6612。下面会有对着两种驱动模块的简单介绍,另外也附上相关资料的链接,如果看完我的不明白可以点进去链接查看详情。
提示:这里介绍两个我常用的电机驱动(L298N和TB6612),用这两个常用的电机驱动来让小电机转起来。
(一)、两种常用的电机驱动的简单了解
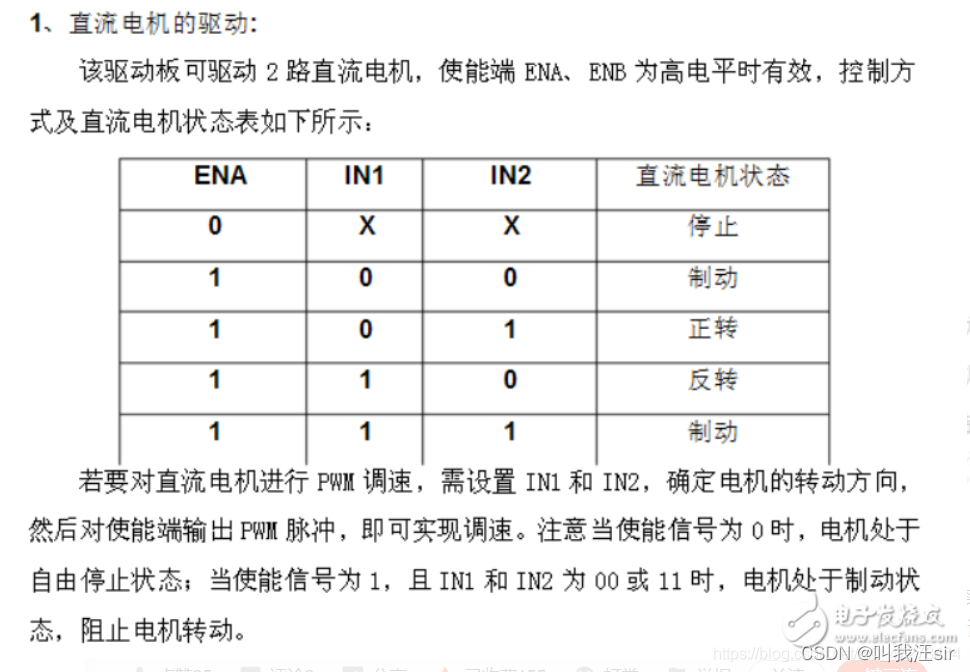
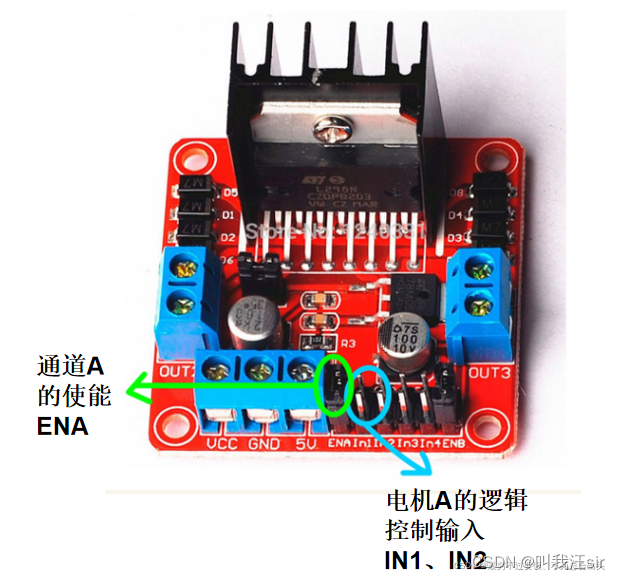
1. L298N
L298N驱动的说明大概如下,可以对应自己的驱动看看。
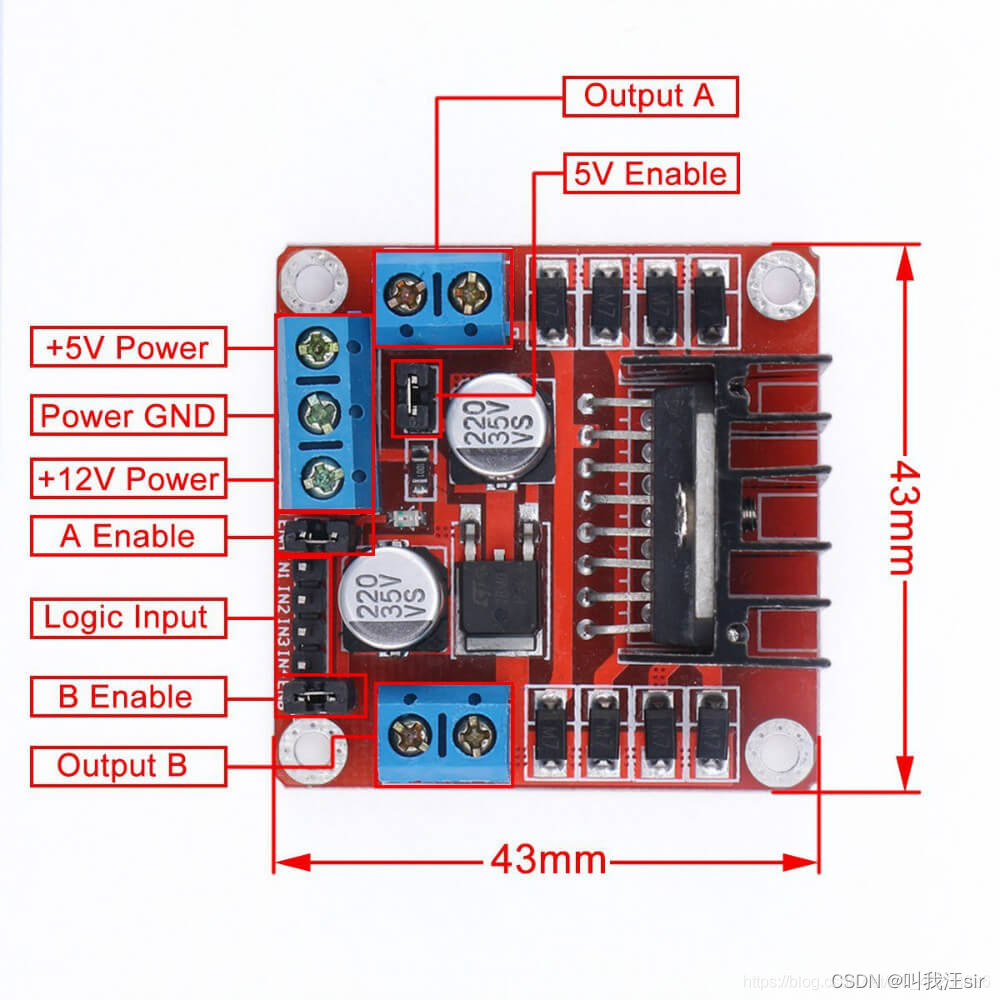
IN1,IN2,IN3,IN4依次分别对应OUT1,OUT2,OUT3,OUT4
ENA对应IN1和IN2的使能。
ENB对应IN3和IN4的使能。
用一个电机接线说明: OUT1,OUT2接直流电机电机两根线,IN1,IN2接单片机的两个IO口,驱动供电方面看自己的电源电压而定。小于5V接5V和GND,大于5小于12V接12V和GND。
看不太明白进去链接看看
参考资料:
链接: L298N、电机、单片机的线路连接.
链接: L298N电机驱动模块详解
链接: stm32单片机驱动L298N模块
2.TB6612
这个模块还比较简单,使用也和L298N类似,网上资料挺多的,这里不介绍了,下面附上一个讲的还不错的文章链接。
链接: TB6612使用说明,使用方法,引脚图,实物图
总的来说两个驱动模块使用方式大同小异,会一个的使用其他基本触类旁通了。
(二)、驱动电机代码
1.说明
单片机我用的是stm32f103c8t6,用其他型号单片机同样适用。
实现逻辑为,使能两个IO口,使其分别输出高低电平,来使驱动输出高低电平,从而使电机转动。给驱动的供电电压大小决定了电机转速的快慢。但是不能超过其供电最大值,防止把自己中伤。
2.代码部分
#include "stm32f10x.h" // Device header
void Motor_Init(void)// 初始化两个IO口PB12,PB13
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_12|GPIO_Pin_13;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_ResetBits(GPIOB,GPIO_Pin_12|GPIO_Pin_13);//保证两个IO口开始时为低电平
}
int main()
{
Motor_Init();//初始化IO口
while(1)
{
GPIO_ResetBits(GPIOB,GPIO_Pin_12);//将PB12置低电平
GPIO_SetBits(GPIOB,GPIO_Pin_13);//将PB13置高电平
}
}
3.以上代码对应的接线
将PB12,PB13分别接在IN1,IN2(或AIN1,AIN2)。
如果正常我们将会看见电机转动。
二、手机通过蓝牙与小车通信
(一)、配置蓝牙模块
拿出你的hc05,按照如图所示连接线路,注意要接5V要不然电压不够,用不了。
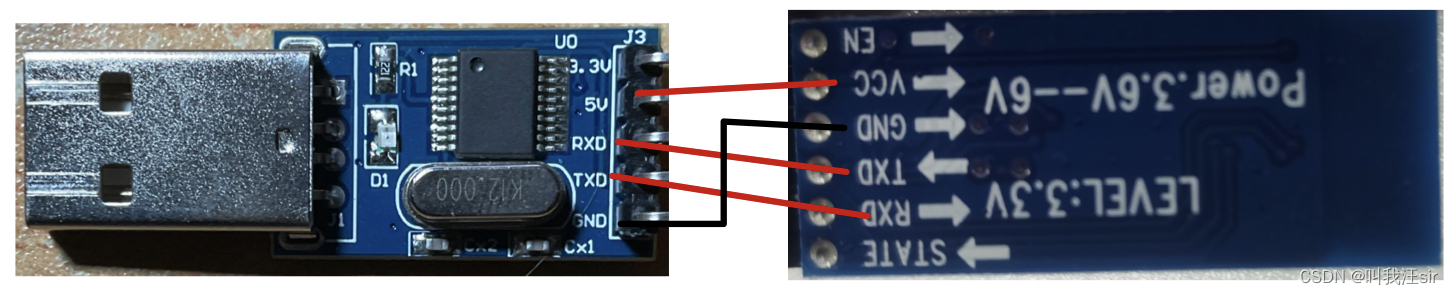
然后用at指令配置蓝牙模块。链接: 蓝牙模块HC05
配置完成后,看看手机发送字符蓝牙能不能接受到并且传到电脑上。
(二)、手机通过蓝牙与单片机通信
待填充
三、麦科勒姆轮的运动分析
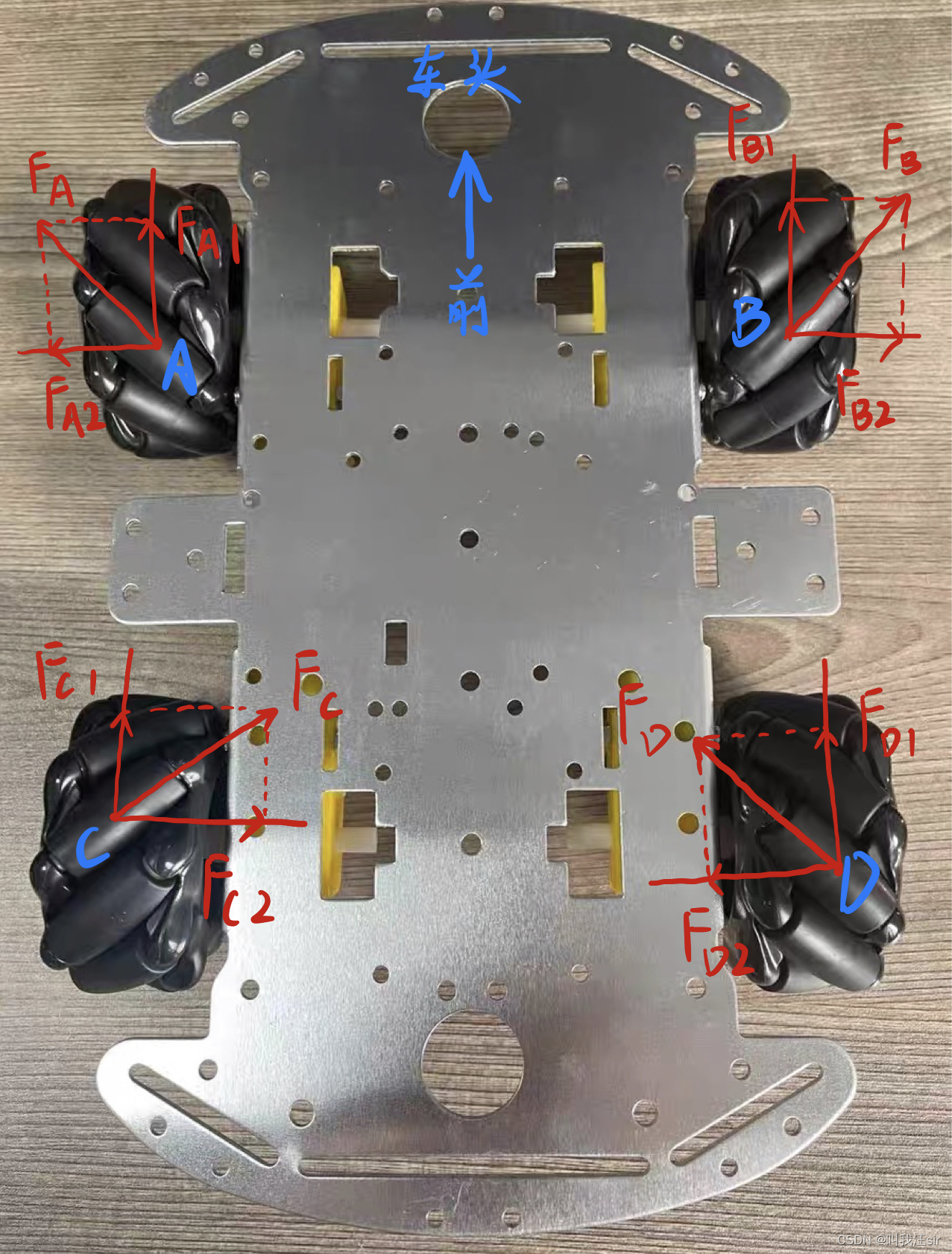
如图所示的车头方向。
前进,四个轮胎均向前转,四个轮胎单独的运动分析如图,可见车轮在横向的运动全部相互抵消,即横向运动为0。而每个轮胎在纵向的运动均向前,故车整体向前。
后退,同理。
向左平移,只用让B和C轮胎向相反的方向转动,然后使车整体纵向的运动抵消,和运动向左即可。
向右平移,同理。
左右旋转,则应用差速法来旋转。
这里可能解释的不是很好,另外更加具体形象的介绍可以去B站看看,有那种讲解的视频。
开始上手
待填充
完成 >v<
总结
待填充
最后
以上就是香蕉冰棍最近收集整理的关于【做一个简易的STM32蓝牙麦克拉姆轮小车】前言材料准备前期知识储备与试验开始上手完成 >v<总结的全部内容,更多相关【做一个简易的STM32蓝牙麦克拉姆轮小车】前言材料准备前期知识储备与试验开始上手完成内容请搜索靠谱客的其他文章。








发表评论 取消回复