法1
- step1:cd到orocos_kdl目录下,新建文件夹
build - step2:切换到
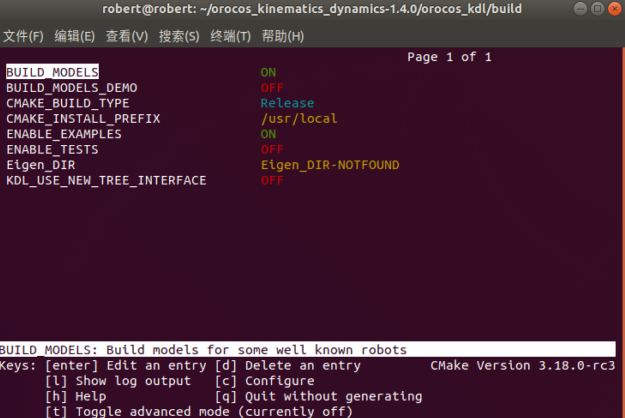
build中执行ccmake .. - step3:将
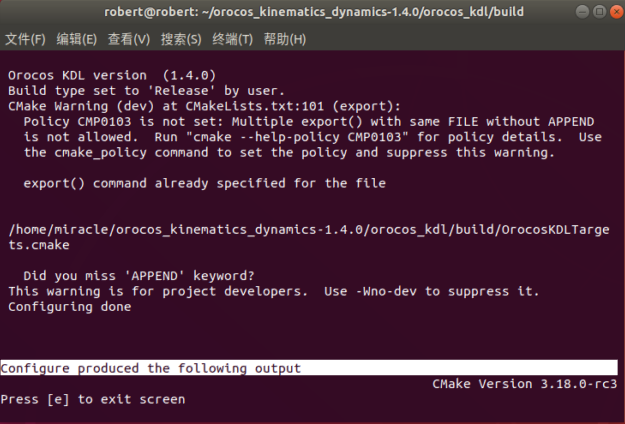
BUILD_MODELS和ENABLE_EXAMPLES两项设为ON,选c选项生成配置信息,然后选e退出提示
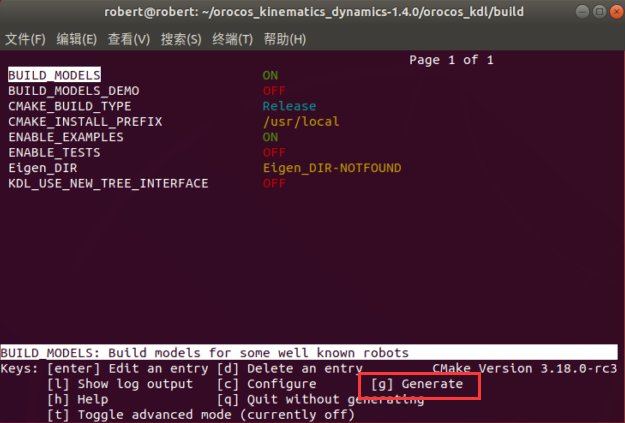
- step4:这时发现多了一个
g选项,选g,然后会自动退出配置GUI界面
- step5:执行如下命令
make sudo make install
大功告成!!!!
法2
cd orocos_kinematics_dynamics/orocos_kdl
mkdir build && cd build
cmake -DCMAK_BUILD_TYPE=Release ..
make -j8
sudo make install
根据终端显示查看头文件所在目录
Install the project…
– Install configuration: “Release”
– Installing: /usr/local/share/orocos_kdl/cmake/FindEigen3.cmake
– Installing: /usr/local/share/orocos_kdl/cmake/orocos_kdl-config.cmake
– Installing: /usr/local/share/orocos_kdl/cmake/orocos_kdl-config-version.cmake
– Installing: /usr/local/share/orocos_kdl/cmake/OrocosKDLTargets.cmake
– Installing: /usr/local/share/orocos_kdl/cmake/OrocosKDLTargets-release.cmake
– Installing: /usr/local/lib/pkgconfig/orocos-kdl.pc
– Installing: /usr/local/lib/pkgconfig/orocos_kdl.pc
– Installing: /usr/local/share/orocos_kdl/package.xml
– Installing: /usr/local/lib/liborocos-kdl.so.1.4.0
– Installing: /usr/local/lib/liborocos-kdl.so.1.4
– Installing: /usr/local/lib/liborocos-kdl.so
– Set runtime path of “/usr/local/lib/liborocos-kdl.so.1.4.0” to “$ORIGIN/…/lib”
– Installing: /usr/local/include/kdl/articulatedbodyinertia.hpp
– Installing: /usr/local/include/kdl/chain.hpp
– Installing: /usr/local/include/kdl/chaindynparam.hpp
– Installing: /usr/local/include/kdl/chainfdsolver.hpp
– Installing: /usr/local/include/kdl/chainfdsolver_recursive_newton_euler.hpp
– Installing: /usr/local/include/kdl/chainfksolver.hpp
– Installing: /usr/local/include/kdl/chainfksolverpos_recursive.hpp
– Installing: /usr/local/include/kdl/chainfksolvervel_recursive.hpp
– Installing: /usr/local/include/kdl/chainidsolver.hpp
– Installing: /usr/local/include/kdl/chainidsolver_recursive_newton_euler.hpp
– Installing: /usr/local/include/kdl/chainidsolver_vereshchagin.hpp
– Installing: /usr/local/include/kdl/chainiksolver.hpp
– Installing: /usr/local/include/kdl/chainiksolverpos_lma.hpp
– Installing: /usr/local/include/kdl/chainiksolverpos_nr.hpp
– Installing: /usr/local/include/kdl/chainiksolverpos_nr_jl.hpp
– Installing: /usr/local/include/kdl/chainiksolvervel_pinv.hpp
– Installing: /usr/local/include/kdl/chainiksolvervel_pinv_givens.hpp
– Installing: /usr/local/include/kdl/chainiksolvervel_pinv_nso.hpp
– Installing: /usr/local/include/kdl/chainiksolvervel_wdls.hpp
– Installing: /usr/local/include/kdl/chainjnttojacdotsolver.hpp
– Installing: /usr/local/include/kdl/chainjnttojacsolver.hpp
– Installing: /usr/local/include/kdl/frameacc.hpp
– Installing: /usr/local/include/kdl/frameacc_io.hpp
– Installing: /usr/local/include/kdl/frames.hpp
– Installing: /usr/local/include/kdl/frames_io.hpp
– Installing: /usr/local/include/kdl/framevel.hpp
– Installing: /usr/local/include/kdl/framevel_io.hpp
– Installing: /usr/local/include/kdl/jacobian.hpp
– Installing: /usr/local/include/kdl/jntarray.hpp
– Installing: /usr/local/include/kdl/jntarrayacc.hpp
– Installing: /usr/local/include/kdl/jntarrayvel.hpp
– Installing: /usr/local/include/kdl/jntspaceinertiamatrix.hpp
– Installing: /usr/local/include/kdl/joint.hpp
– Installing: /usr/local/include/kdl/kdl.hpp
– Installing: /usr/local/include/kdl/kinfam.hpp
– Installing: /usr/local/include/kdl/kinfam_io.hpp
– Installing: /usr/local/include/kdl/motion.hpp
– Installing: /usr/local/include/kdl/path.hpp
– Installing: /usr/local/include/kdl/path_circle.hpp
– Installing: /usr/local/include/kdl/path_composite.hpp
– Installing: /usr/local/include/kdl/path_cyclic_closed.hpp
– Installing: /usr/local/include/kdl/path_line.hpp
– Installing: /usr/local/include/kdl/path_point.hpp
– Installing: /usr/local/include/kdl/path_roundedcomposite.hpp
– Installing: /usr/local/include/kdl/rigidbodyinertia.hpp
– Installing: /usr/local/include/kdl/rotational_interpolation.hpp
– Installing: /usr/local/include/kdl/rotational_interpolation_sa.hpp
– Installing: /usr/local/include/kdl/rotationalinertia.hpp
– Installing: /usr/local/include/kdl/segment.hpp
– Installing: /usr/local/include/kdl/solveri.hpp
– Installing: /usr/local/include/kdl/stiffness.hpp
– Installing: /usr/local/include/kdl/trajectory.hpp
– Installing: /usr/local/include/kdl/trajectory_composite.hpp
– Installing: /usr/local/include/kdl/trajectory_segment.hpp
– Installing: /usr/local/include/kdl/trajectory_stationary.hpp
– Installing: /usr/local/include/kdl/tree.hpp
– Installing: /usr/local/include/kdl/treefksolver.hpp
– Installing: /usr/local/include/kdl/treefksolverpos_recursive.hpp
– Installing: /usr/local/include/kdl/treeidsolver.hpp
– Installing: /usr/local/include/kdl/treeidsolver_recursive_newton_euler.hpp
– Installing: /usr/local/include/kdl/treeiksolver.hpp
– Installing: /usr/local/include/kdl/treeiksolverpos_nr_jl.hpp
– Installing: /usr/local/include/kdl/treeiksolverpos_online.hpp
– Installing: /usr/local/include/kdl/treeiksolvervel_wdls.hpp
– Installing: /usr/local/include/kdl/treejnttojacsolver.hpp
– Installing: /usr/local/include/kdl/velocityprofile.hpp
– Installing: /usr/local/include/kdl/velocityprofile_dirac.hpp
– Installing: /usr/local/include/kdl/velocityprofile_rect.hpp
– Installing: /usr/local/include/kdl/velocityprofile_spline.hpp
– Installing: /usr/local/include/kdl/velocityprofile_trap.hpp
– Installing: /usr/local/include/kdl/velocityprofile_traphalf.hpp
– Installing: /usr/local/include/kdl/frameacc.inl
– Installing: /usr/local/include/kdl/frames.inl
– Installing: /usr/local/include/kdl/framevel.inl
– Installing: /usr/local/include/kdl/config.h
– Installing: /usr/local/include/kdl/utilities/error.h
– Installing: /usr/local/include/kdl/utilities/error_stack.h
– Installing: /usr/local/include/kdl/utilities/kdl-config.h
– Installing: /usr/local/include/kdl/utilities/rall1d.h
– Installing: /usr/local/include/kdl/utilities/rall1d_io.h
– Installing: /usr/local/include/kdl/utilities/rall2d.h
– Installing: /usr/local/include/kdl/utilities/rall2d_io.h
– Installing: /usr/local/include/kdl/utilities/rallNd.h
– Installing: /usr/local/include/kdl/utilities/traits.h
– Installing: /usr/local/include/kdl/utilities/utility.h
– Installing: /usr/local/include/kdl/utilities/utility_io.h
– Installing: /usr/local/include/kdl/utilities/ldl_solver_eigen.hpp
– Installing: /usr/local/include/kdl/utilities/scoped_ptr.hpp
– Installing: /usr/local/include/kdl/utilities/svd_HH.hpp
– Installing: /usr/local/include/kdl/utilities/svd_eigen_HH.hpp
– Installing: /usr/local/include/kdl/utilities/svd_eigen_Macie.hpp
最后
以上就是羞涩乌龟最近收集整理的关于OROCOS之KDL(1)—— Linux环境搭建篇法1法2的全部内容,更多相关OROCOS之KDL(1)——内容请搜索靠谱客的其他文章。








发表评论 取消回复