#include <iostream>
#include <Eigen/Core>
#include <Eigen/Eigen>
#include <Eigen/Geometry>
int main()
{
Eigen::Quaterniond q1 = Eigen::Quaterniond(0, 0, 0, 90).normalized();
Eigen::Quaterniond q2 = Eigen::Quaterniond(0, 90, 0, 0).normalized();
Eigen::Vector3d p1 = Eigen::Vector3d(1, 2, 3);
Eigen::Vector3d p2 = Eigen::Vector3d(4, 5, 6);
Eigen::Matrix4d t1 = Eigen::Matrix4d();
t1.setIdentity();
t1.block<3,3>(0,0) = q1.toRotationMatrix();
t1.block<3,1>(0,3) = p1;
Eigen::Matrix4d t2 = Eigen::Matrix4d();
t2.setIdentity();
t2.block<3,3>(0,0) = q2.toRotationMatrix();
t2.block<3,1>(0,3) = p2;
std::cout<< t1<<std::endl<<std::endl;
std::cout<< t2<<std::endl<<std::endl;
Eigen::Vector4d p0 = Eigen::Vector4d(0, 0, 0, 1);
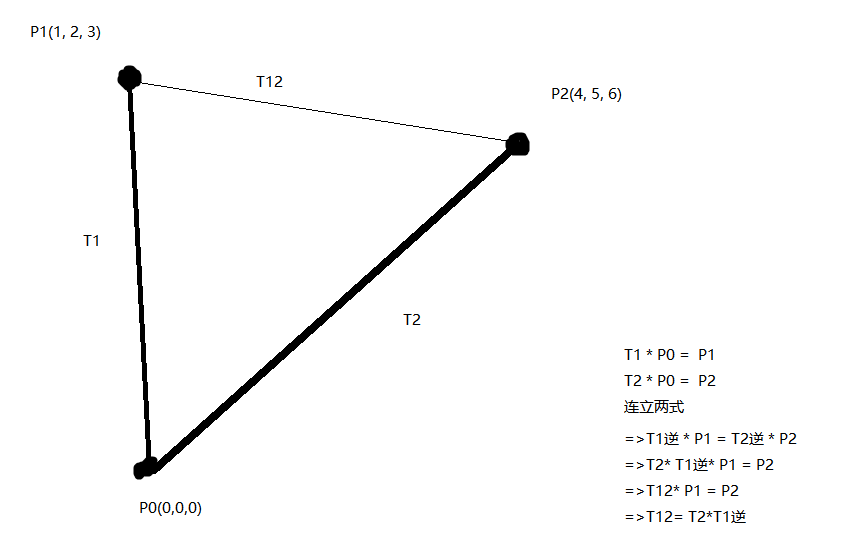
auto P1 = t1 *p0;//坐标转换 P0(0, 0, 0) =>转换矩阵T1() =>P1(1, 2, 3)
auto P2 = t2 *p0;//坐标转换 P0(0, 0, 0) =>转换矩阵T2() =>P2(1, 2, 3)
std::cout<< P1<<std::endl;
std::cout<< P2<<std::endl;
std::cout<< "======={P0 = }==================="<<std::endl;
auto P0 = t1.inverse() * P1;// t1.inverse() * P1 ==t2.inverse() * P2
std::cout<< t1.inverse() * P1<<std::endl;//验证 P0 = t1.inverse() * P1 输出 [0,0,0,1]
std::cout<< t2.inverse() * P2<<std::endl;//验证 P0 = t2.inverse() * P2 输出 [0,0,0,1]
auto t12 = t2 * t1.inverse(); //t12 = t2 * t1.inverse();
std::cout<< t12.inverse() <<std::endl;
std::cout<< (t12 * P1) <<std::endl; //P2 = t12 *P1
return 0;
}
最后
以上就是内向钢笔最近收集整理的关于Eigne 坐标变换 (四)的全部内容,更多相关Eigne内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复