开篇介绍
在实际应用中,当要进行姿态解算时,必不可少的便是矩阵操作,这里我们引入Eigen这一矩阵操作库。Eigen是一个C++开源线性代数库,它提供了快速的有关矩阵的线性代数运算,还包括解方程等功能。本博客通过一些实例应用,演示Eigen下矩阵逆运算、伴随矩阵运算、行列式计算和特征值、特征向量的计算等等。
一、旋转矩阵
我们知道向量的内积可以描述向量之间的投影关系,而向量的外积,能表示向量的旋转。在欧氏变换中,首先来考虑旋转。我们设某个单位正交基
(
e
1
,
e
2
,
e
3
)
(e_1,e_2,e_3)
(e1,e2,e3)经过一次旋转,变成了
(
e
1
′
,
e
2
′
,
e
3
′
)
(e_{1}^{'},e_{2}^{'},e_{3}^{'})
(e1′,e2′,e3′)。那么,对于同一个向量a,它在两个坐标系下的坐标为
[
a
1
,
a
2
,
a
3
]
T
[a_1,a_2,a_3]^T
[a1,a2,a3]T和
[
a
1
′
,
a
2
′
,
a
3
′
]
T
[a_1^{'},a_2^{'},a_3^{'}]^T
[a1′,a2′,a3′]T。根据坐标的定义,有:
[
e
1
,
e
2
,
e
3
]
[
a
1
,
a
2
,
a
3
]
T
=
[
e
1
′
,
e
2
′
,
e
3
′
]
[
a
1
′
,
a
2
′
,
a
3
′
]
T
left [ e_{1},e_2,e_3 right ][a_1,a_2,a_3]^T=[e_1^{'},e_2^{'},e_3^{'}][a_1^{'},a_2^{'},a_3^{'}]^T
[e1,e2,e3][a1,a2,a3]T=[e1′,e2′,e3′][a1′,a2′,a3′]T
为了描述两个坐标之间的关系,对上面等式左右同时左乘
[
e
1
T
,
e
2
T
,
e
3
T
]
T
[e_1^T,e_2^T,e_3^T]^T
[e1T,e2T,e3T]T,那么左边的系数变成了单位矩阵,所以:
[
a
1
,
a
2
,
a
3
]
T
=
[
e
1
T
e
1
′
e
1
T
e
2
′
e
1
T
e
3
′
e
2
T
e
1
′
e
2
T
e
2
′
e
2
T
e
3
′
e
3
T
e
1
′
e
3
T
e
2
′
e
3
T
e
3
′
]
[
a
1
′
a
2
′
a
3
′
]
≜
R
a
′
[a_1,a_2,a_3]^T=begin{bmatrix} e_1^T e_1^{'}&e_1^T e_2^{'}& e_1^T e_3^{'}\ e_2^T e_1^{'}&e_2^T e_2^{'}&e_2^T e_3^{'}\ e_3^T e_1^{'}&e_3^T e_2^{'}&e_3^T e_3^{'}end{bmatrix} begin{bmatrix} a_1^{'}\ a_2^{'}\ a_3^{'} end{bmatrix}triangleq Ra^{'}
[a1,a2,a3]T=⎣⎡e1Te1′e2Te1′e3Te1′e1Te2′e2Te2′e3Te2′e1Te3′e2Te3′e3Te3′⎦⎤⎣⎡a1′a2′a3′⎦⎤≜Ra′
我们把中间阵拿出来,定义成一个矩阵R。这个矩阵由两组基之间的内积组成,刻画了旋转前后同一个向量的坐标变换关系。只要旋转是一样的,那么这个矩阵也是一样的。可以说,矩阵R描述了旋转本身。因此它又称为旋转矩阵。
旋转矩阵是一个行列式为1的正交矩阵。反之,行列式为1的正交矩阵也是一个旋转矩阵。所以,我们可以把旋转矩阵的集合定义如下:
S
O
(
n
)
=
{
R
∈
R
n
×
n
∣
R
R
T
=
I
,
d
e
t
(
R
)
=
1
}
SO(n)=left { Rin mathrm{R}^{n×n}|RR^T=I,det(R)=1 right }
SO(n)={R∈Rn×n∣RRT=I,det(R)=1}
SO(n)是特殊正交群。这个集合由n维空间的旋转矩阵组成,特别的,SO(3)就是三维空间的旋转。通过旋转矩阵,我们可以直接谈论两个坐标系之间的旋转变换,而不用再从基开始谈起了。换句话说,旋转矩阵可以描述相机的旋转。
由于旋转矩阵为正交阵,它的逆描述了一个相反的旋转。按照上面的定义方式,有:
a
′
=
R
−
1
a
=
R
T
a
a^{'}=R^{-1}a=R^{T}a
a′=R−1a=RTa
然而,在欧氏变换中,除了旋转之外还有一个平移。考虑世界坐标系中的向量a,经过一次旋转(用R描述)和一次平移t后,得到了
a
′
a^{'}
a′,那么把旋转和平移合到一起,有
a
′
=
R
a
+
t
a^{'}=Ra+t
a′=Ra+t
其中t为平移向量。
二、变换矩阵
旋转矩阵完整的表达了欧氏空间的平移和旋转,但是还存在一个小问题:这里的变换关系不是一个线性关系。假设进行了两次变换:
R
1
,
t
1
R_1,t_1
R1,t1和
R
2
,
t
2
R_2,t_2
R2,t2,满足:
b
=
R
1
a
+
t
1
,
c
=
R
2
b
+
t
2
b=R_1a+t_1,c=R_2b+t_2
b=R1a+t1,c=R2b+t2
但是从a到c的变换为:
c
=
R
2
(
R
1
a
+
t
1
)
+
t
2
c=R_2(R_1a+t_1)+t_2
c=R2(R1a+t1)+t2
这样的形式在变换多次后会显得过于复杂。因此我们要引入齐次坐标和变换矩阵重写旋转矩阵的变换等式:
[
a
′
1
]
=
[
R
t
0
T
1
]
[
a
1
]
≜
T
[
a
1
]
begin{bmatrix} mathbf{a}^{'}\ 1 end{bmatrix}= begin{bmatrix} mathbf{R}&mathbf{t} \ mathbf{0}^T& 1 end{bmatrix}begin{bmatrix} mathbf{a}\ 1 end{bmatrix}triangleq Tbegin{bmatrix} mathbf{a}\ 1 end{bmatrix}
[a′1]=[R0Tt1][a1]≜T[a1]
这是一个数学技巧:我们把一个三维向量末尾添加1,变成了四维向量,称为齐次坐标。对于这个四维向量,我们可以把旋转和平移写在一个矩阵里面,使得整个关系变成了线性关系。该式中,矩阵T称为变换矩阵。同样地,根据分块矩阵求逆的方法,我们可以轻易的求出变换矩阵的逆:
T
−
1
=
[
R
T
−
R
T
t
0
T
1
]
mathbf{T}^{-1}=begin{bmatrix} mathbf{R}^T&mathbf{-R}^Tt \ mathbf{0}^T& 1 end{bmatrix}
T−1=[RT0T−RTt1]
三、Eigen实践
在清楚了旋转矩阵和变换矩阵后,我们可以在Kdevelop上尝试着操作矩阵。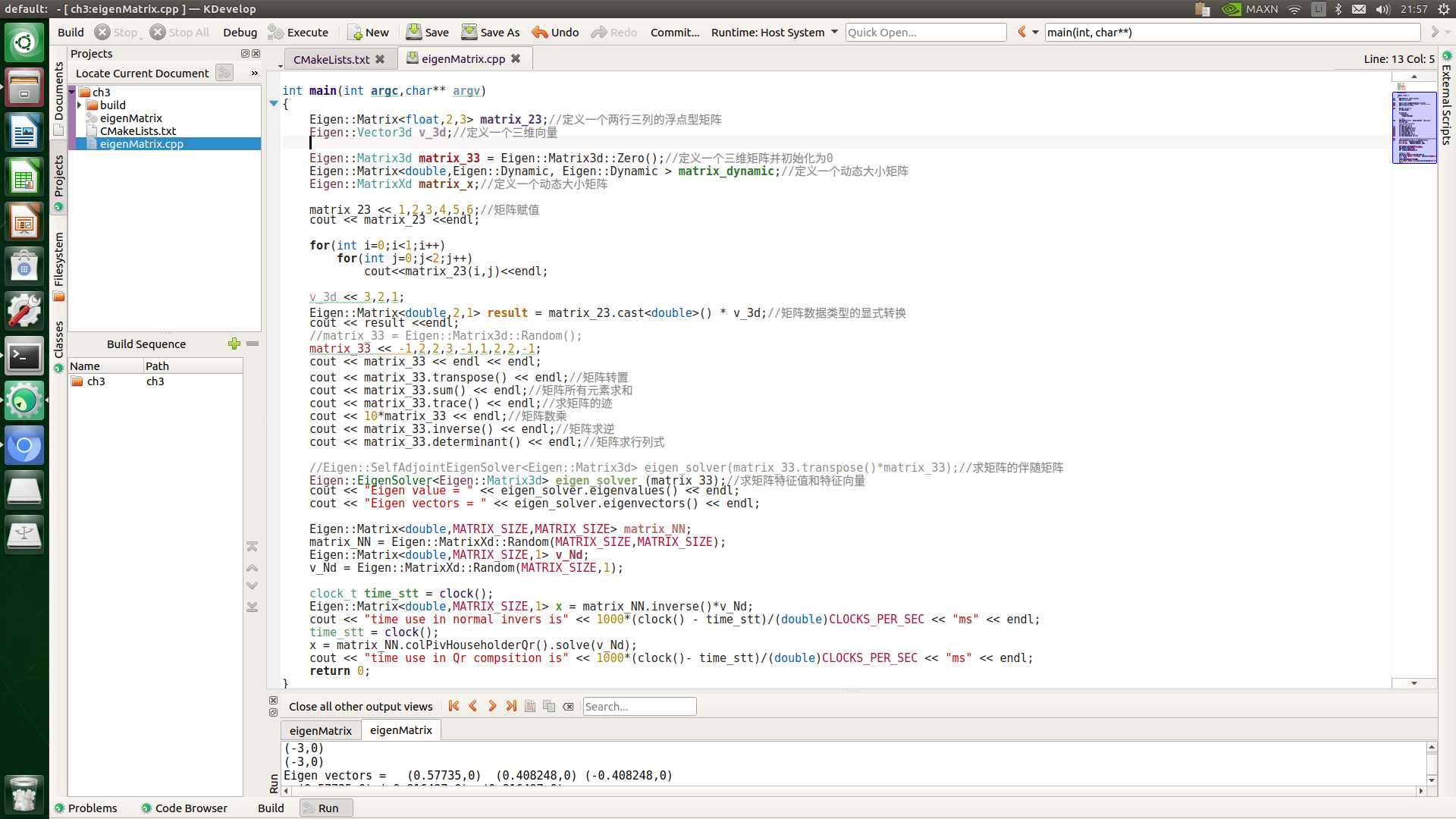
点击构建后直接执行,在调试窗口显示打印结果如下: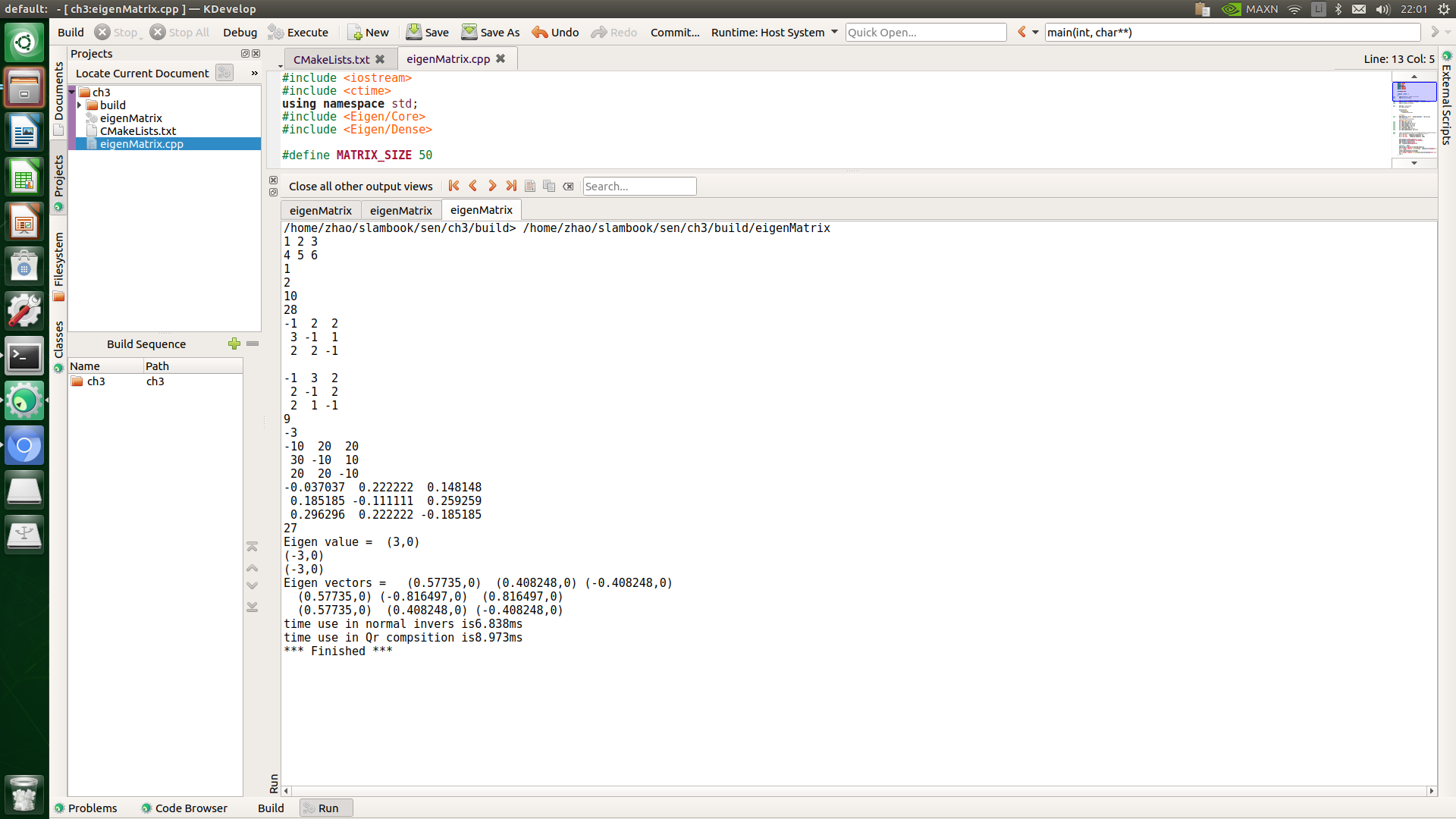
四、总结
在初步实践了Eigen的矩阵操作后,我们很容易便求得了想要矩阵的一些特征,以及一些矩阵运算,这一切都为后续的姿态解算和后端处理提供坚实基础。
最后
以上就是忧虑灯泡最近收集整理的关于Eigen之矩阵基本操作的全部内容,更多相关Eigen之矩阵基本操作内容请搜索靠谱客的其他文章。
![[案例7-2]商城进货交易记录](https://www.shuijiaxian.com/files_image/reation/bcimg24.png)







发表评论 取消回复