**后面发现这样改有问题,正确的修改方法参考这条提交记录:https://github.com/TokyoClod/sitl_gazebo/commit/e61e6e46a665804f072474b2b1b085fb701ef7b1
1 增加向下摄像头的urdf模型
在/home/abner/src/Firmware/Tools/sitl_gazebo/models目录下新建文件夹,名为downward_cam;在其中增加模型文件model.sdf
<?xml version="1.0" ?>
<sdf version="1.4">
<model name="camera">
<link name="link">
<inertial>
<pose>0.01 0.025 0.025 0 -0 0</pose>
<mass>0.01</mass>
<inertia>
<ixx>4.15e-6</ixx>
<ixy>0</ixy>
<ixz>0</ixz>
<iyy>2.407e-6</iyy>
<iyz>0</iyz>
<izz>2.407e-6</izz>
</inertia>
</inertial>
<visual name="visual">
<geometry>
<box>
<size>0.02 0.05 0.05</size>
</box>
</geometry>
</visual>
<!--752x480 MT9V034 image sensor, only 64x64 pixels used-->
<sensor name="down_cam" type="camera">
<always_on>true</always_on>
<update_rate>30.0</update_rate>
<visualize>true</visualize>
<topic>/px4_down_cam</topic>
<camera>
<horizontal_fov>1.7453</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.1</near>
<far>100</far>
</clip>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.001</stddev>
</noise>
</camera>
<plugin name="down_camera_controller" filename="libgazebo_ros_camera.so">
<robotNamespace></robotNamespace>
</plugin>
</sensor>
</link>
</model>
</sdf>
<!-- vim: set et fenc=utf-8 ff=unix sts=0 sw=4 ts=4 : -->
这一部分是复制的光流相机的模块,修改了一下相机的参数而已,其中<horizontal_fov>应该代表了相机的视角大小:
h
o
r
i
z
o
n
t
a
l
_
f
o
v
=
角
度
∗
π
180
horizontal_fov=角度*frac{ pi }{180}
horizontal_fov=角度∗180π
这里是100度。
2 相机模型添加到iris中
在/home/abner/src/Firmware/Tools/sitl_gazebo/models目录下新建文件夹,名为iris_down_cam;在其中增加模型文件iris_down_cam.sdf
<sdf version='1.6'>
<model name='iris_down_cam'>
<include>
<uri>model://iris</uri>
</include>
<include>
<uri>model://downward_cam</uri>
<pose>-0.12 0.05 0 0 1.5708 1.5708</pose>
</include>
<joint name="camera_joint" type="fixed">
<child>camera::link</child>
<parent>iris::base_link</parent>
<axis>
<xyz>0 0 1</xyz>
</axis>
</joint>
</model>
</sdf>
3 添加配置文件
在/home/abner/src/Firmware/posix-configs/SITL/init/lpe下,将iris复制一份,重命名为iris_down_cam
##4 修改启动文件
打开/home/abner/src/Firmware/launch下的mavros_posix_sitl.launch
将
<arg name="vehicle" default="iris"/>
修改为:
<arg name="vehicle" default="iris_down_cam"/>
还有这一行改为:(否则会启动失败)
<arg name="fcu_url" default="udp://:14540@127.0.0.1:14557"/>
##5 运行launch文件和offb节点
如果在这一步有问题,请参考本人前一篇博客:
http://blog.csdn.net/yjy728/article/details/77015325
运行:
roslaunch px4 mavros_posix_sitl.launch
与:
rosrun offb offb_node
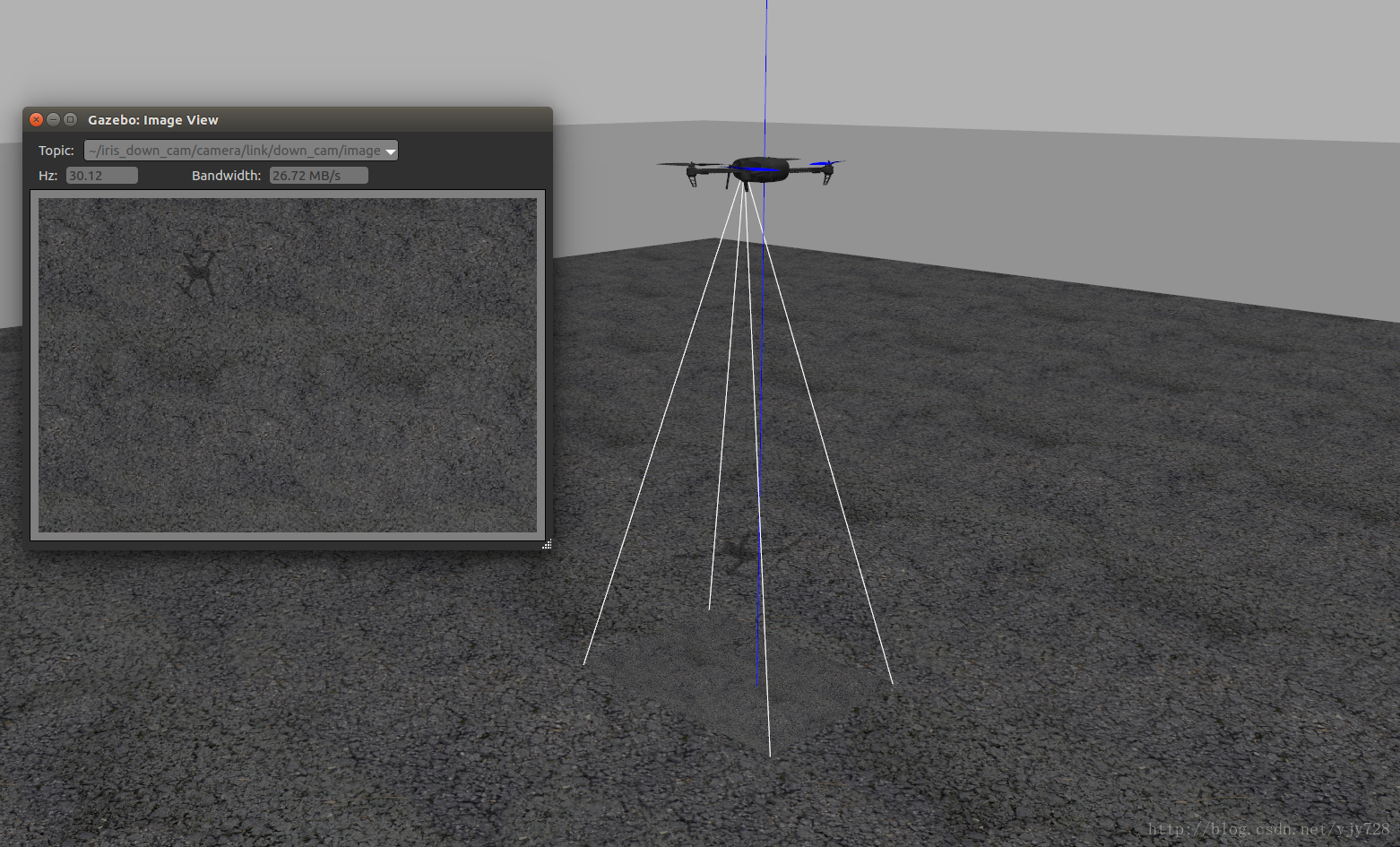
在Gazebo中,选择Windows-Topic Visualization中选择/gazebo/default/iris_down_cam/camera/link/…这个话题,会出现摄像机画面,如下图所示:
最后
以上就是端庄小懒猪最近收集整理的关于[px4仿真]px4的STIL仿真中添加向下的摄像头的全部内容,更多相关[px4仿真]px4内容请搜索靠谱客的其他文章。




![[px4仿真]px4的STIL仿真中添加向下的摄像头](https://www.shuijiaxian.com/files_image/reation/bcimg17.png)



发表评论 取消回复