在智能小车项目中,我们通过控制直流电机的正反转、刹车和转速来控制小车的行动。
在这台小车中,对直流电机发出的控制指令来自于Arduino主控板,而Arduino主控板的外部输入则来自于超声波传感器、灰度传感器、遥控器。这篇文章制作的自动跟随小车的Arduino主控板外部输入来自于超声波传感器。
【i·Make】Arduino入门自学,电子学会机器人等级考试三四级,22—自动跟随小车
超声波传感器
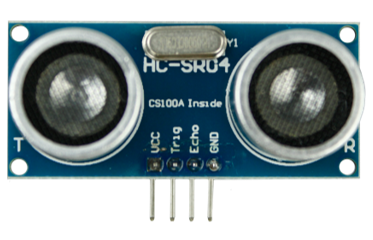
超声波传感器是利用超声波的特性的传感器。超声波接收到触发信号后,模块自动发出8个40KHZ的方波,同时开始计时并自动监测是否有信号返回,通过记录超声波从开始发送到接收回波间隔,来判断前方障碍物的距离。

工作电压:5V
有效探测距离:2mm~2.5m
感应角度范围:15°
超声波传感器有四个引脚:GND、VCC、Trig、Echo。
Trig为信号引脚——触发引脚,
Echo为信号引脚——数据接收引脚。
超声波测距
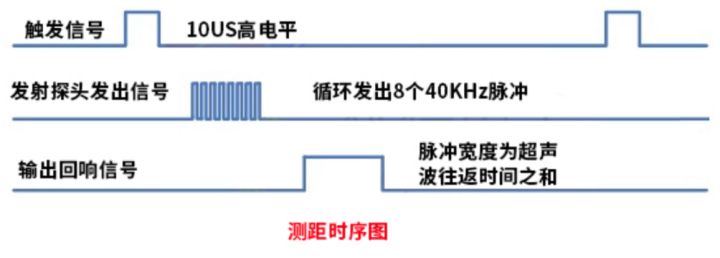
·先向Trig引脚发送时长不小于10μs的高电平,触发超声波模块;
·触发后,模块会自动发射8个40KHZ的方波,并自动检测是否有信号返回;
·如果有信号返回,则通过Echo引脚输出一个高电平,高电平持续的时间是超声波从发射到接收的时间。
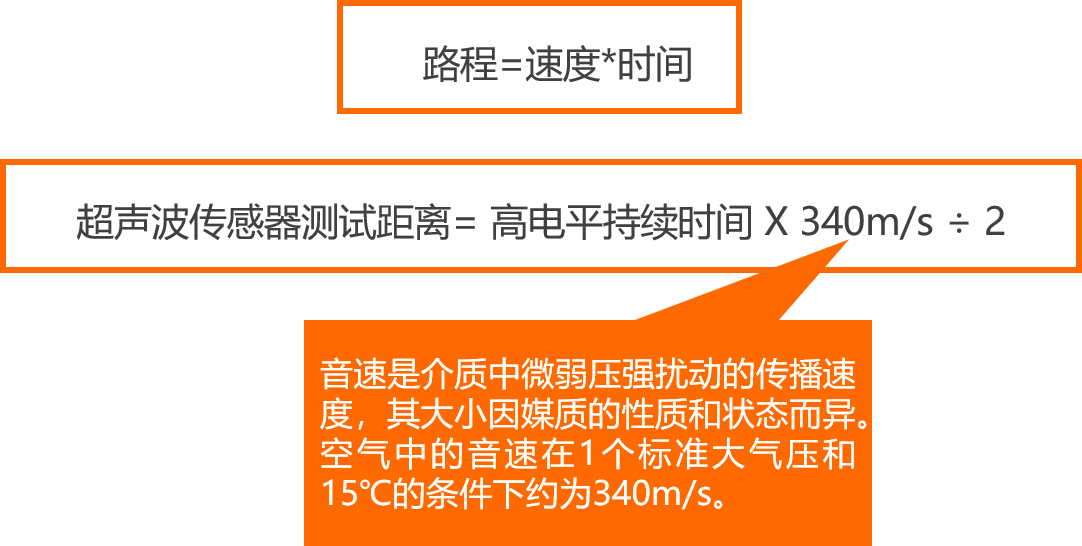
计算测试距离
线路连接

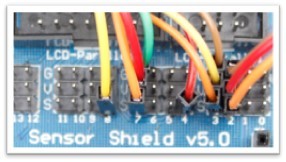
超声波传感器接在控制器的#7和#8口,#7口接传感器上的Trig端子,#8口接传感器上的Echo端子。
自动跟随智能小车Mind+程序
通过设置一个反应距离范围,超声波传感器测量的距离只有在此范围内才起作用,其次再设定自动跟随保持距离,当超声波测量的距离超过该距离时,小车前进;当测得值小于该距离时,小车后退。
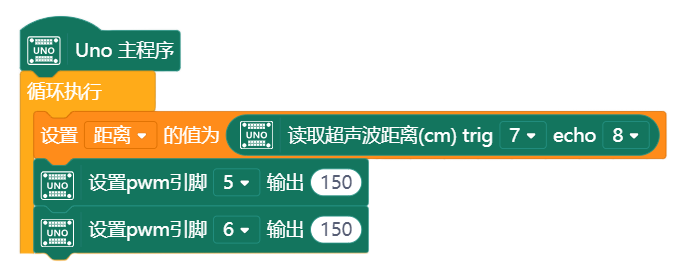
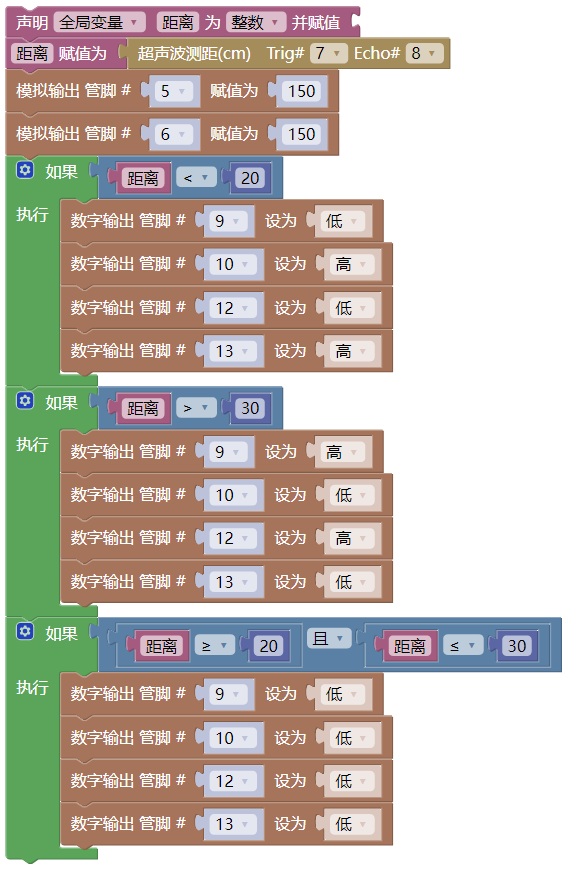
默认初始速度参数pwm值为150,(pwm值低于70,小车可能动不起来)#7口接传感器上的Trig端子,#8口接传感器上的Echo端子。

如果检测距离<20公分,小车后退;如果检测距离>30公分,小车前进。
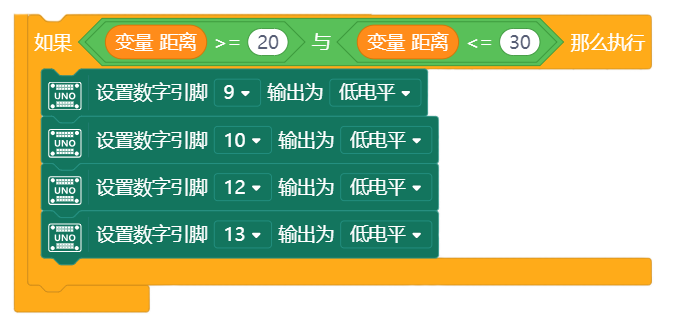
如果检测距离在20~30公分之间,小车停止。这样就能实现一个简单的跟随情景。
自动跟随智能小车Mixly程序
最后
以上就是和谐小鸽子最近收集整理的关于使用超声波传感器采用图形化编程制作Arduino自动跟随小车超声波传感器线路连接自动跟随智能小车Mind+程序自动跟随智能小车Mixly程序的全部内容,更多相关使用超声波传感器采用图形化编程制作Arduino自动跟随小车超声波传感器线路连接自动跟随智能小车Mind+程序自动跟随智能小车Mixly程序内容请搜索靠谱客的其他文章。







![UWB DWM1000 智能跟踪小车 --[蓝点无限]](https://www.shuijiaxian.com/files_image/reation/bcimg18.png)
发表评论 取消回复