蓝点DWM1000 模块已经打样测试完毕,有兴趣的可以申请购买了,更多信息参见 蓝点论坛
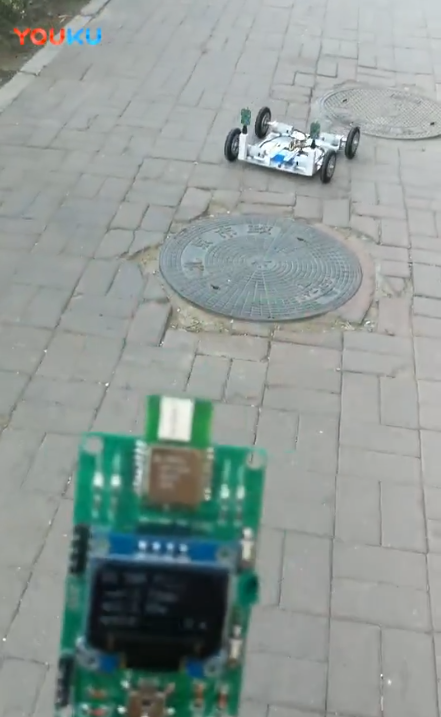
UWB 智能跟踪小车:一共三个UWB模块,手持一个,小车上两个。
通过测量小车上两个模块与手持模块之间的距离,通过三角函数,计算出手持模块的相对角度,通过相对角度控制小车转弯。
通过小车上某一个模块与手持模块直接的距离,控制小车是否启动(视频中设定距离为1m)
注意点: 小车上两个模块距离要稍微尽量远一点,这样测距误差对于角度的误差会相对较小。
其它:使用两个模块只能计算角度和距离,但是无法确定手持模块在车前还是车后,也就是小车只能向前走,如果要实现倒车,则需要再加一个模块。
演示视频:https://v.youku.com/v_show/id_XMzkzMTI0MjM5Mg
转载于:https://www.cnblogs.com/tuzhuke/p/10002298.html
最后
以上就是多情钢铁侠最近收集整理的关于UWB DWM1000 智能跟踪小车 --[蓝点无限]的全部内容,更多相关UWB内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。




![UWB DWM1000 智能跟踪小车 --[蓝点无限]](https://www.shuijiaxian.com/files_image/reation/bcimg18.png)



发表评论 取消回复