机器人购买链接:
https://item.taobao.com/item.htm?spm=a1z38n.10677092.0.0.59a21debCqLXYP&id=532012951368
接下来打算发布一款自动跟随机器人的制作教程,它使用了声源定位、图像识别、超声波等多种方式来实现完全自主控制,不需要人工干预即可对特定目标进行跟踪。
前几年,市场上出现了不少利用开源路由器软件实现的视频小车,这类小车可以实现远程控制,并且能够回传视频。然而这类小车使用的硬件可塑性不强,往往使用openwrt的固件(在路由器上运行,如更改代码需要交叉编译)+51单片机实现,这些硬件对新手来说要上手是比较难的,可能只是会用会实现,但是很难按自己的需求更改具体的程序。
与此同时,市场上还出现了另一类开源神器,它们分别是树莓派和Arduino系列的产品。树莓派一般运行Linux操作系统,与其它Linux开发板相比,它的优点是不需要交叉编译或者内核编译,你可以直接把它当作一台普通电脑来进行开发。Arduino相当于单片机,与其它单片机相比,它的优点是IDE跨平台性好,除了支持Windows外还支持Linux和Mac,另外,它对一些底层的功能进行了封装,你可以用比较接近上层语言的方式来做单片机开发(当然如果要在Arduino的IDE里直接写操作寄存器的代码也是完全没问题的)。这两类设备还得到了开源社区的大力支持,资料丰富。树莓派适合计算量大的场合,比如本项目中的图像处理和声源定位,Arduino适合对实时性要求高的场合以及IO口数量多的场合(另外它的5v IO口可以直接接很多传感器也很方便),因此决定把它们结合起来使用。把这两类设备的协作方式搞熟悉后,也有利于将来把这些设备装到四轴飞行器上(本人有另一套教程使用Arduino Uno实现四轴飞控)。
先上一些照片和视频
(粗略跟踪)http://v.youku.com/v_show/id_XMzM5OTAyNjAxNg==.html
(精确跟踪)http://v.youku.com/v_show/id_XMzQwNjg1NTk0MA==.html
(完整实现)http://v.youku.com/v_show/id_XMzQwNzYzMjYyMA==.html
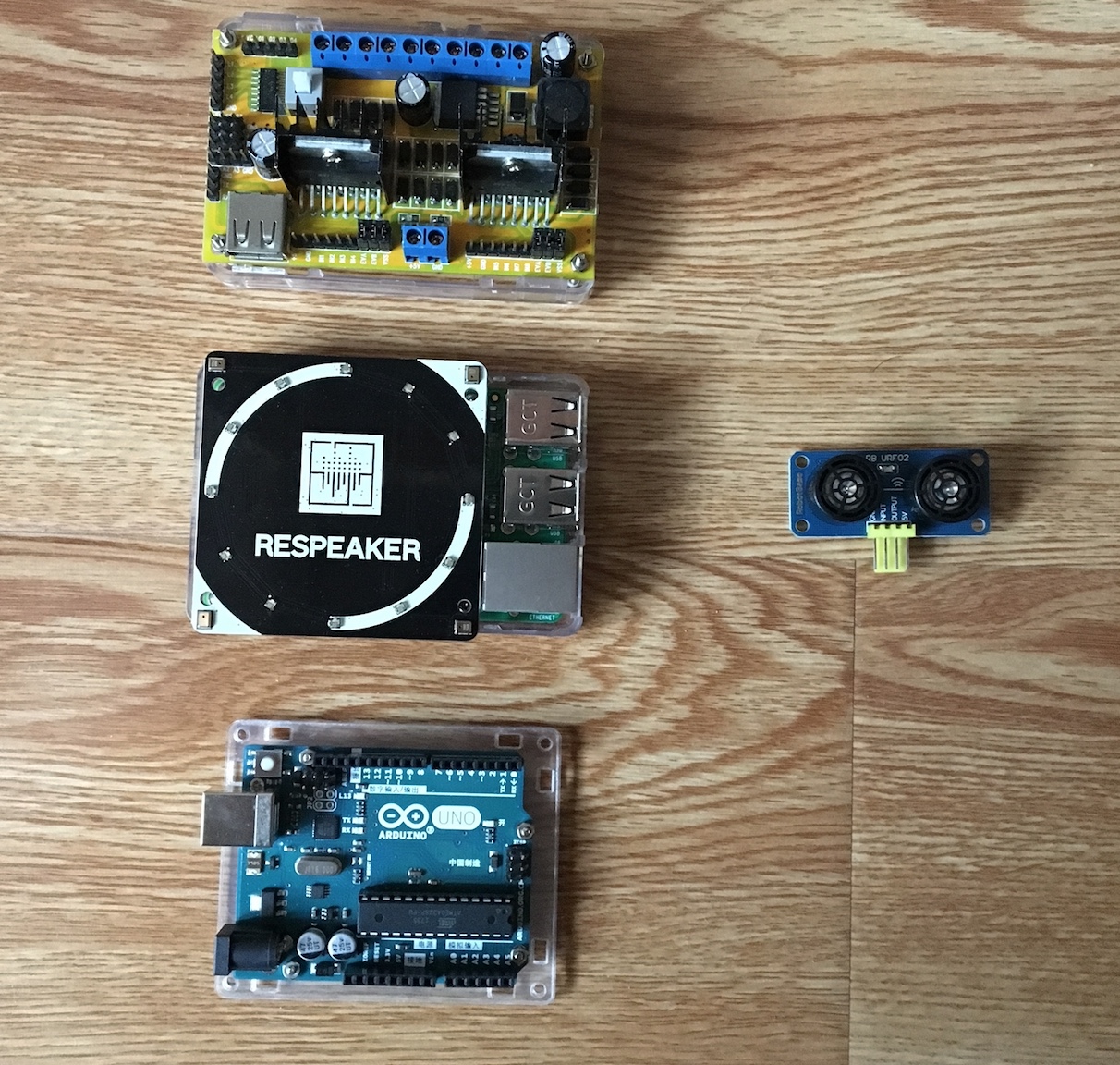
下图从上到下(从左到右)依次为:
1. 带USB供电、电源开关的双L298N模块
2. 插入4通道麦克风阵列的树莓派3
3. Arduino Uno
4. 超声波模块
另外,隆重推荐一款超便携的微型示波器 Aeroscope,非常适合机器人、无人机DIY,可以绑在设备上边运行边看波形。

最后
以上就是隐形花瓣最近收集整理的关于自动跟随机器人教程(一)(树莓派、Arduino教程)的全部内容,更多相关自动跟随机器人教程(一)(树莓派、Arduino教程)内容请搜索靠谱客的其他文章。





![UWB DWM1000 智能跟踪小车 --[蓝点无限]](https://www.shuijiaxian.com/files_image/reation/bcimg18.png)


发表评论 取消回复