一阶系统用比例积分滑膜函数
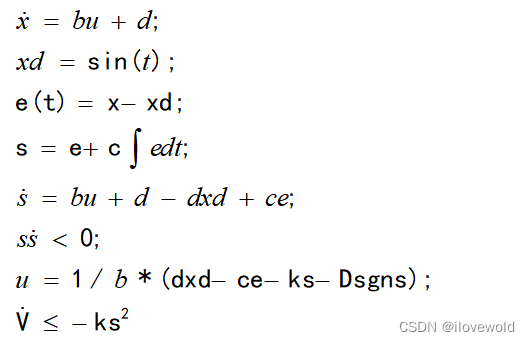
仿真结果
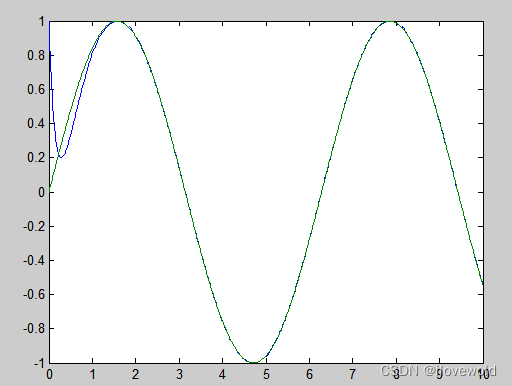
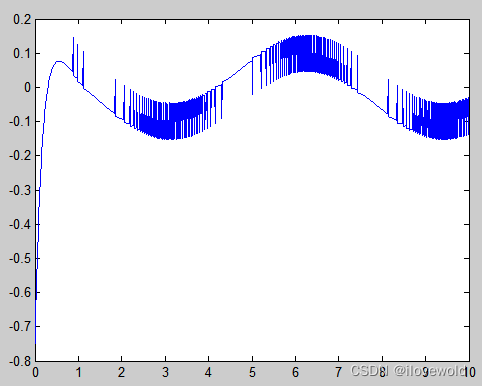
图3相轨迹
图3横坐标为积分误差纵坐标为比例误差,
滑膜面为s=0,时,e与ef的坐标构成的面。
上述仿真结果和刘金琨智能控制书中仿真结果一致。
clear all;
close all;
clc;
t=10;
ts=0.01;%ts代表时间间隔
%控制器参数
c=5;
k1=3;%%%参数符号和循环结构里循环符号要区分开来。
D=0.5;
%控制对象初始状态
x(1)=1;
dx(1)=0;
%系统参数
b=10;
for k=1:1:t/ts+1
if k==1
K=(k-1);
times(k)=K*ts;%序号k代表K*ts时刻
xd(k)=sin(K*ts);
dxd(k)=cos(K*ts);
e(k)=x(k)-xd(k);
ef(k)=0;
else
K=(k-1);
times(k)=K*ts;%序号k代表K*ts时刻
xd(k)=sin(K*ts);
dxd(k)=cos(K*ts);
e(k)=x(k)-xd(k);
ef(k)=ef(k-1)+(e(k)+e(k-1))*ts/2;
end
s(k)=e(k)+c*ef(k);
ut(k)=1/b*(-c*e(k)+dxd(k)-k1*s(k)-D*sign(s(k)));
dt(k)=0.5*sin(K*ts);%状态干扰
dx(k)=(b*ut(k)+dt(k));
x(k+1)=x(k)+dx(k)*ts;
end
x(:,end)=[];
figure(1)
plot(times,x,times,xd);
figure(2)
plot(times,ut);
figure(3)
plot(ef,e,ef,-c*ef);
最后
以上就是无语水池最近收集整理的关于一阶系统的滑膜控制器设计及仿真的全部内容,更多相关一阶系统内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复