基本思想:使用友善开发板进行目标检测和测试
第一步:查看教程和进行刷机http://wiki.friendlyelec.com/wiki/index.php/NanoPi_NEO/zh#.E4.B8.8B.E8.BD.BD.E7.B3.BB.E7.BB.9F.E5.9B.BA.E4.BB.B6

小开发板子还是蛮不错的~,友善也开始卷了。。。。
第二步:刷机完成之后,开始远程连接
(1)先执行搜索命令
:UsersAdministrator>for /L %i IN (1,1,254) DO ping -w 2 -n 1 192.168.10.%i(2)显示刚才缓存的信息
C:UsersAdministrator>arp -a
Interface: 192.168.10.171 --- 0x8
Internet Address Physical Address Type
192.168.10.1 02-81-c1-21-49-bb dynamic
192.168.10.37 02-81-c1-21-49-bb dynamic
192.168.10.76 02-81-c1-21-49-bb dynamic
192.168.10.80 02-81-c1-21-49-bb dynamic
192.168.10.150 02-81-c1-21-49-bb dynamic
192.168.10.152 02-81-c1-21-49-bb dynamic
192.168.10.255 02-81-c1-21-49-bb static
224.0.0.22 01-00-5e-00-00-16 static
224.0.0.251 02-81-c1-21-49-bb static
224.0.0.252 02-81-c1-21-49-bb static
224.9.234.121 01-00-5e-09-ea-79 static
224.149.203.115 02-81-c1-21-49-bb static
225.96.85.110 02-81-c1-21-49-bb static
225.138.111.106 02-81-c1-21-49-bb static
226.96.85.110 01-00-5e-60-55-6e static
231.96.85.110 01-00-5e-60-55-6e static
231.252.216.115 01-00-5e-7c-d8-73 static
232.96.85.110 01-00-5e-60-55-6e static
233.96.85.110 01-00-5e-60-55-6e static
234.62.83.49 02-81-c1-21-49-bb static
234.96.85.110 01-00-5e-60-55-6e static
235.96.85.110 01-00-5e-60-55-6e static
235.169.186.202 01-00-5e-29-ba-ca static
236.58.182.123 01-00-5e-3a-b6-7b static
236.96.85.110 01-00-5e-60-55-6e static
237.133.42.175 01-00-5e-05-2a-af static
238.79.97.123 01-00-5e-4f-61-7b static
238.93.203.115 01-00-5e-5d-cb-73 static
239.255.255.250 01-00-5e-7f-ff-fa static
255.255.255.255 ff-ff-ff-ff-ff-ff static测试一下 ,然后使用ssh连接,进行尝试连接这几个ip,哪个可以连接,就用哪个
ubuntu@sxj731533730:~$ ssh root@192.168.10.80
The authenticity of host '192.168.10.80 (192.168.10.80)' can't be established.
ECDSA key fingerprint is SHA256:Nt8JP5g2bNK/Nu3FxI22xNGj0KesVnMmPDKaWdRdzs4.
Are you sure you want to continue connecting (yes/no/[fingerprint])? yes
Warning: Permanently added '192.168.10.80' (ECDSA) to the list of known hosts.
root@192.168.10.80's password:
Permission denied, please try again.
root@192.168.10.80's password:
Connection closed by 192.168.10.80 port 22
ubuntu@sxj731533730:~$ ssh root@192.168.10.80
root@192.168.10.80's password:
_____ _ _ _ _____ _ _____ ____
| ___| __(_) ___ _ __ __| | |_ _| ____| | | ____/ ___|
| |_ | '__| |/ _ '_ / _` | | | | | _| | | | _|| |
| _|| | | | __/ | | | (_| | | |_| | |___| |___| |__| |___
|_| |_| |_|___|_| |_|__,_|_|__, |_____|_____|_________|
|___/
Welcome to Ubuntu 16.04.2 LTS 4.14.111
System load: 0.06 Up time: 1 min Local users: 2
Memory usage: 9 % of 491Mb IP: 192.168.10.80
CPU temp: 21°C
Usage of /: 7% of 29G
* Documentation: http://wiki.friendlyarm.com/Ubuntu
* Forum: http://www.friendlyarm.com/Forum/
root@NanoPi-NEO:~#也可以使用window remote工具访问界面
 第二步、 先测试一下ncnn的benchmark,给up测个数据,因为后面的识别需要使用ncnn进行开发~暂且不用pytorch版本,因为官方提供了视频流的推流源代码,可以结合直接使用,就不用重复开发python代码检测+推流+调用摄像头代码~
第二步、 先测试一下ncnn的benchmark,给up测个数据,因为后面的识别需要使用ncnn进行开发~暂且不用pytorch版本,因为官方提供了视频流的推流源代码,可以结合直接使用,就不用重复开发python代码检测+推流+调用摄像头代码~
root@NanoPi-NEO:~# git clone https://github.com/Tencent/ncnn
Cloning into 'ncnn'...
remote: Enumerating objects: 25669, done.
remote: Counting objects: 100% (830/830), done.
remote: Compressing objects: 100% (415/415), done.
remote: Total 25669 (delta 599), reused 561 (delta 415), pack-reused 24839
Receiving objects: 100% (25669/25669), 17.91 MiB | 2.53 MiB/s, done.
Resolving deltas: 100% (21438/21438), done.
Checking connectivity... done.
Checking out files: 100% (2639/2639), done.
root@NanoPi-NEO:~# cd ncnn/
root@NanoPi-NEO:~/ncnn# mkdir build
root@NanoPi-NEO:~/ncnn# cd build
root@NanoPi-NEO:~/ncnn/build# cmake ..
root@NanoPi-NEO:~/ncnn/build# make -j8
root@NanoPi-NEO:~/ncnn/build# sudo make install测试一下,啥玩意,都测试不了。。。
root@NanoPi-NEO:~/ncnn/build# cd benchmark/
root@NanoPi-NEO:~/ncnn/build/benchmark# cp -r ../../benchmark/*.param .
root@NanoPi-NEO:~/ncnn/build/benchmark# ./benchncnn 1 4 0 -1 0
loop_count = 1
num_threads = 4
powersave = 0
gpu_device = -1
cooling_down = 0
squeezenet min = 686.84 max = 686.84 avg = 686.84
squeezenet_int8 min = 601.06 max = 601.06 avg = 601.06
mobilenet min = 1251.82 max = 1251.82 avg = 1251.82
mobilenet_int8 min = 988.78 max = 988.78 avg = 988.78
mobilenet_v2 min = 846.36 max = 846.36 avg = 846.36
mobilenet_v3 min = 678.72 max = 678.72 avg = 678.72
shufflenet min = 408.54 max = 408.54 avg = 408.54
shufflenet_v2 min = 373.87 max = 373.87 avg = 373.87
mnasnet min = 736.88 max = 736.88 avg = 736.88
proxylessnasnet min = 950.14 max = 950.14 avg = 950.14
efficientnet_b0 min = 1141.05 max = 1141.05 avg = 1141.05
efficientnetv2_b0 min = 1259.52 max = 1259.52 avg = 1259.52
regnety_400m min = 995.64 max = 995.64 avg = 995.64
blazeface min = 98.81 max = 98.81 avg = 98.81
googlenet min = 2006.27 max = 2006.27 avg = 2006.27
googlenet_int8 min = 1896.92 max = 1896.92 avg = 1896.92
resnet18 min = 1699.50 max = 1699.50 avg = 1699.50
resnet18_int8 min = 1482.52 max = 1482.52 avg = 1482.52
alexnet min = 1234.55 max = 1234.55 avg = 1234.55
Segmentation fault
root@NanoPi-NEO:~/ncnn/build/benchmark# ./benchncnn 1 2 0 -1 0
loop_count = 1
num_threads = 2
powersave = 0
gpu_device = -1
cooling_down = 0
squeezenet min = 1209.82 max = 1209.82 avg = 1209.82
squeezenet_int8 min = 1086.96 max = 1086.96 avg = 1086.96
mobilenet min = 2371.86 max = 2371.86 avg = 2371.86
mobilenet_int8 min = 1955.16 max = 1955.16 avg = 1955.16
mobilenet_v2 min = 1440.63 max = 1440.63 avg = 1440.63
mobilenet_v3 min = 1127.70 max = 1127.70 avg = 1127.70
shufflenet min = 686.27 max = 686.27 avg = 686.27
shufflenet_v2 min = 748.49 max = 748.49 avg = 748.49
mnasnet min = 1354.21 max = 1354.21 avg = 1354.21
proxylessnasnet min = 1547.11 max = 1547.11 avg = 1547.11
efficientnet_b0 min = 2013.23 max = 2013.23 avg = 2013.23
efficientnetv2_b0 min = 2327.19 max = 2327.19 avg = 2327.19
regnety_400m min = 1743.65 max = 1743.65 avg = 1743.65
blazeface min = 157.64 max = 157.64 avg = 157.64
googlenet min = 3701.03 max = 3701.03 avg = 3701.03
googlenet_int8 min = 3422.73 max = 3422.73 avg = 3422.73
resnet18 min = 3170.84 max = 3170.84 avg = 3170.84
resnet18_int8 min = 2595.68 max = 2595.68 avg = 2595.68
alexnet min = 2305.54 max = 2305.54 avg = 2305.54
Segmentation fault
root@NanoPi-NEO:~/ncnn/build/benchmark# ./benchncnn 1 1 0 -1 0
loop_count = 1
num_threads = 1
powersave = 0
gpu_device = -1
cooling_down = 0
squeezenet min = 2312.63 max = 2312.63 avg = 2312.63
squeezenet_int8 min = 2057.98 max = 2057.98 avg = 2057.98
mobilenet min = 4762.58 max = 4762.58 avg = 4762.58
mobilenet_int8 min = 3907.42 max = 3907.42 avg = 3907.42
mobilenet_v2 min = 2727.87 max = 2727.87 avg = 2727.87
mobilenet_v3 min = 2154.93 max = 2154.93 avg = 2154.93
shufflenet min = 1102.24 max = 1102.24 avg = 1102.24
shufflenet_v2 min = 1200.01 max = 1200.01 avg = 1200.01
mnasnet min = 2547.67 max = 2547.67 avg = 2547.67
proxylessnasnet min = 2770.91 max = 2770.91 avg = 2770.91
efficientnet_b0 min = 3863.97 max = 3863.97 avg = 3863.97
efficientnetv2_b0 min = 4651.81 max = 4651.81 avg = 4651.81
regnety_400m min = 3313.56 max = 3313.56 avg = 3313.56
blazeface min = 287.59 max = 287.59 avg = 287.59
googlenet min = 7387.17 max = 7387.17 avg = 7387.17
googlenet_int8 min = 6645.12 max = 6645.12 avg = 6645.12
resnet18 min = 6311.82 max = 6311.82 avg = 6311.82
resnet18_int8 min = 4906.03 max = 4906.03 avg = 4906.03
alexnet min = 4647.50 max = 4647.50 avg = 4647.50
Segmentation fault
第三步、升级python3.5-python3.6,可以安装pytorch进行推理,但是本菜鸡没用pytorch,虽然安装上去了~,本菜鸡用的c++完成自己的任务,不使用pytorch的,可以跳过第三步
(1)先进行时间校准
root@NanoPi-NEO:~# sudo apt-get install software-properties-common
root@NanoPi-NEO:~# sudo tzselect
#Asia----china---beijing---ok
root@NanoPi-NEO:~# sudo ln -sf /usr/share/zoneinfo/Asia/Shanghai /etc/localtime
root@NanoPi-NEO:~# date
Fri Apr 15 23:45:09 UTC 2022
root@NanoPi-NEO:~# cp /usr/share/zoneinfo/Asia/ShangHai /etc/localtime
cp: cannot stat '/usr/share/zoneinfo/Asia/ShangHai': No such file or directory
root@NanoPi-NEO:~# sudo ln -sf /usr/share/zoneinfo/Asia/Shanghai /etc/localtime
root@NanoPi-NEO:~# sudo apt-get install ntpdate
Reading package lists... Done
Building dependency tree
Reading state information... Done
The following NEW packages will be installed:
ntpdate
0 upgraded, 1 newly installed, 0 to remove and 219 not upgraded.
Need to get 44.2 kB of archives.
After this operation, 147 kB of additional disk space will be used.
Get:1 http://ports.ubuntu.com xenial-security/main armhf ntpdate armhf 1:4.2.8p4+dfsg-3ubuntu5.10 [44.2 kB]
Fetched 44.2 kB in 1s (35.9 kB/s)
debconf: delaying package configuration, since apt-utils is not installed
Selecting previously unselected package ntpdate.
(Reading database ... 110357 files and directories currently installed.)
Preparing to unpack .../ntpdate_1%3a4.2.8p4+dfsg-3ubuntu5.10_armhf.deb ...
Unpacking ntpdate (1:4.2.8p4+dfsg-3ubuntu5.10) ...
Processing triggers for man-db (2.7.5-1) ...
Setting up ntpdate (1:4.2.8p4+dfsg-3ubuntu5.10) ...
root@NanoPi-NEO:~# ntpdate 210.72.145.44
16 Apr 07:53:49 ntpdate[4808]: the NTP socket is in use, exiting
root@NanoPi-NEO:~# date
Sat Apr 16 07:53:58 CST 2022
ot@NanoPi-NEO:~# sudo apt-get install --reinstall ca-certificates
root@NanoPi-NEO:~# sudo add-apt-repository ppa:deadsnakes/ppa
root@NanoPi-NEO:~# sudo add-apt-repository ppa:jonathonf/python-3.6
gpg: keyring `/tmp/tmpfjuhizpl/secring.gpg' created
gpg: keyring `/tmp/tmpfjuhizpl/pubring.gpg' created
gpg: requesting key 6A755776 from hkp server keyserver.ubuntu.com
gpg: /tmp/tmpfjuhizpl/trustdb.gpg: trustdb created
gpg: key 6A755776: public key "Launchpad PPA for deadsnakes" imported
gpg: Total number processed: 1
gpg: imported: 1 (RSA: 1)
OK
root@NanoPi-NEO:~# sudo apt-get install python3.6
仍然无法安装。。。。还是源码安装把
root@NanoPi-NEO:~# wget --no-check-certificate https://www.python.org/ftp/python/3.6.5/Python-3.6.5.tgz
root@NanoPi-NEO:~# tar -xzvf Python-3.6.5.tgz
root@NanoPi-NEO:~# cd Python-3.6.5
root@NanoPi-NEO:~# sudo ./configure --prefix=/usr/local/python3.6.5
root@NanoPi-NEO:~# sudo make install
root@NanoPi-NEO:~# sudo cp /usr/bin/python3 /usr/bin/python3_bak
root@NanoPi-NEO:~# sudo rm /usr/bin/python3
root@NanoPi-NEO:~# sudo ln -s /usr/local/python3.6.5/bin/python3 /usr/bin/python3
oot@NanoPi-NEO:~# python3 -v
Python 3.6.5 (default, Apr 16 2022, 08:39:54)
[GCC 5.4.0 20160609] on linux
Type "help", "copyright", "credits" or "license" for more information.
import 'atexit' # <class '_frozen_importlib.BuiltinImporter'>
>>>然后配置一下pip3,否则无法使用
root@NanoPi-NEO:~# sudo vim /usr/local/bin/pip3
root@NanoPi-NEO:~# cat /usr/local/bin/pip3
#!/usr/bin/python3
# -*- coding: utf-8 -*-
import re
import sys
#from pip._internal.cli.main import main
from pip import main
if __name__ == '__main__':
sys.argv[0] = re.sub(r'(-script.pyw|.exe)?$', '', sys.argv[0])
sys.exit(main())
root@NanoPi-NEO:~# pip3
Usage:
pip <command> [options]
Commands:
install Install packages.
download Download packages.
uninstall Uninstall packages.
freeze Output installed packages in requirements format.
list List installed packages.
show Show information about installed packages.
check Verify installed packages have compatible dependencies.
search Search PyPI for packages.
wheel Build wheels from your requirements.
hash Compute hashes of package archives.
completion A helper command used for command completion.
help Show help for commands.
General Options:
-h, --help Show help.
--isolated Run pip in an isolated mode, ignoring environment variables and user configuration.
-v, --verbose Give more output. Option is additive, and can be used up to 3 times.
-V, --version Show version and exit.
-q, --quiet Give less output. Option is additive, and can be used up to 3 times (corresponding to
WARNING, ERROR, and CRITICAL logging levels).
--log <path> Path to a verbose appending log.
--proxy <proxy> Specify a proxy in the form [user:passwd@]proxy.server:port.
--retries <retries> Maximum number of retries each connection should attempt (default 5 times).
--timeout <sec> Set the socket timeout (default 15 seconds).
--exists-action <action> Default action when a path already exists: (s)witch, (i)gnore, (w)ipe, (b)ackup,
(a)bort.
--trusted-host <hostname> Mark this host as trusted, even though it does not have valid or any HTTPS.
--cert <path> Path to alternate CA bundle.
--client-cert <path> Path to SSL client certificate, a single file containing the private key and the
certificate in PEM format.
--cache-dir <dir> Store the cache data in <dir>.
--no-cache-dir Disable the cache.
--disable-pip-version-check
Don't periodically check PyPI to determine whether a new version of pip is available for
download. Implied with --no-index.可以安装torch了,参考下面教程
Install PyTorch on Jetson Nano - Q-engineering
测试结果
root@NanoPi-NEO:~# python3
Python 3.6.5 (default, Apr 16 2022, 08:39:54)
[GCC 5.4.0 20160609] on linux
Type "help", "copyright", "credits" or "license" for more information.
>>> import torch
>>>第四步、先测试视频流、完成我们识别任务
root@NanoPi-NEO:~/C/mjpg-streamer# export LD_LIBRARY_PATH="$(pwd)"
root@NanoPi-NEO:~/C/mjpg-streamer# make
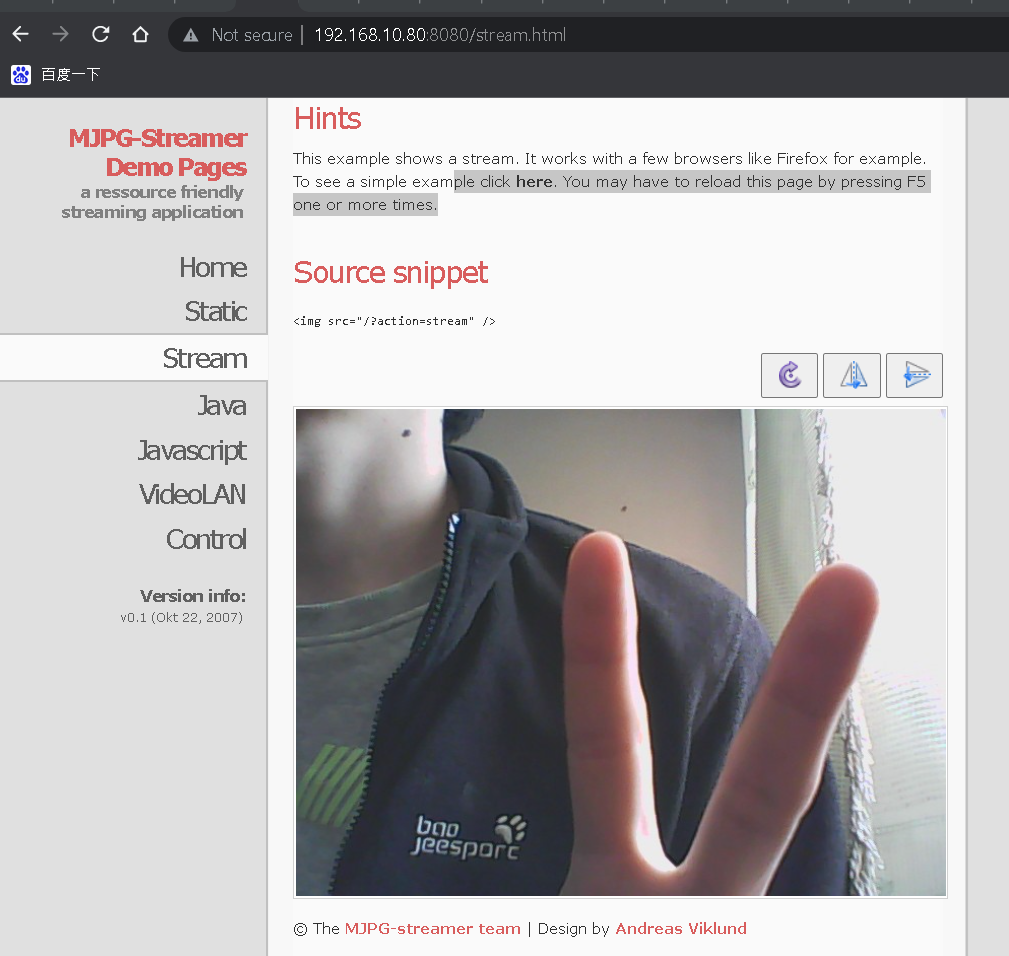
root@NanoPi-NEO:~/C/mjpg-streamer# ./mjpg_streamer -i "./input_uvc.so -d /dev/video0 -y 1 -r 1280x720 -f 30 -q 90 -n -fb 0" -o "./output_http.so -w ./www"
测试视频结果 在网页输入192.168.10.80:8080
第五步、配置一下clion远程开发功能,开始写检测模块和摄像头进行联调
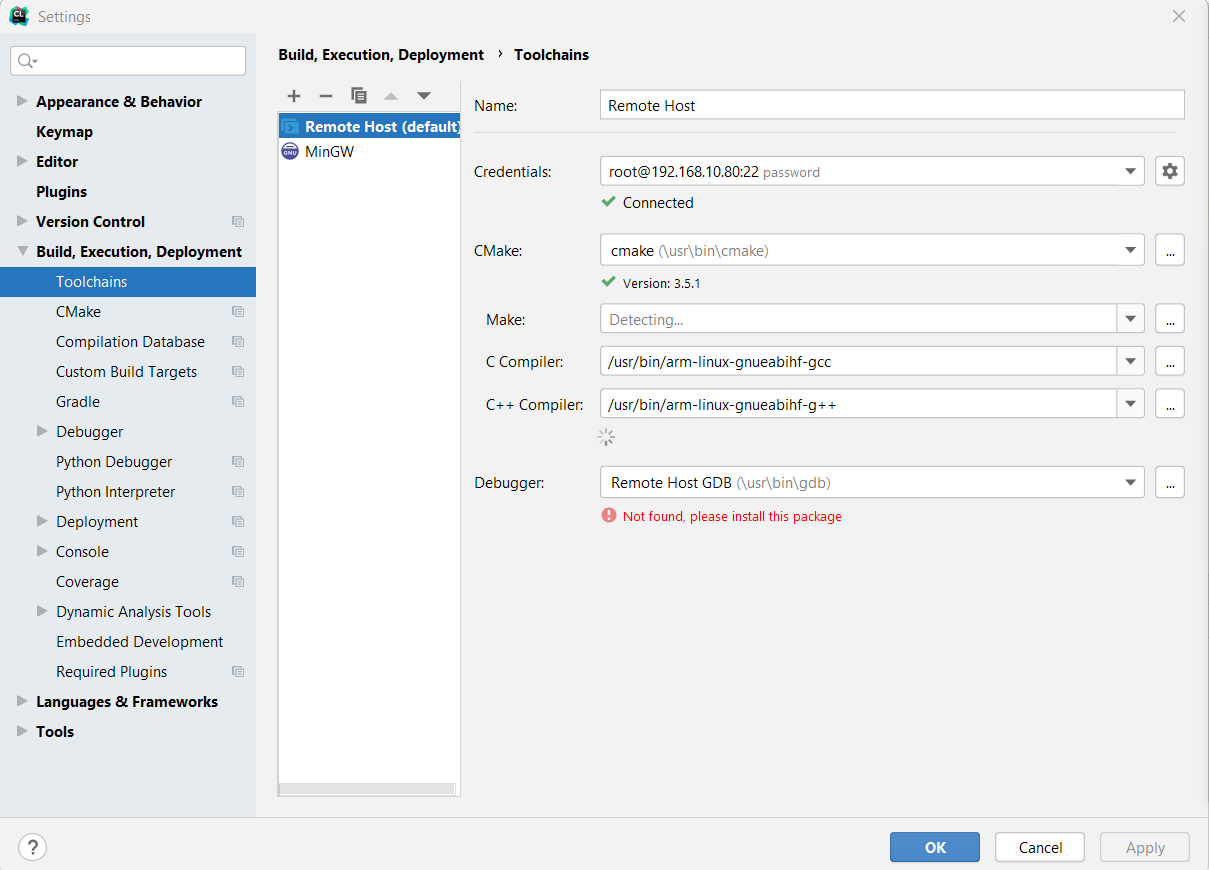
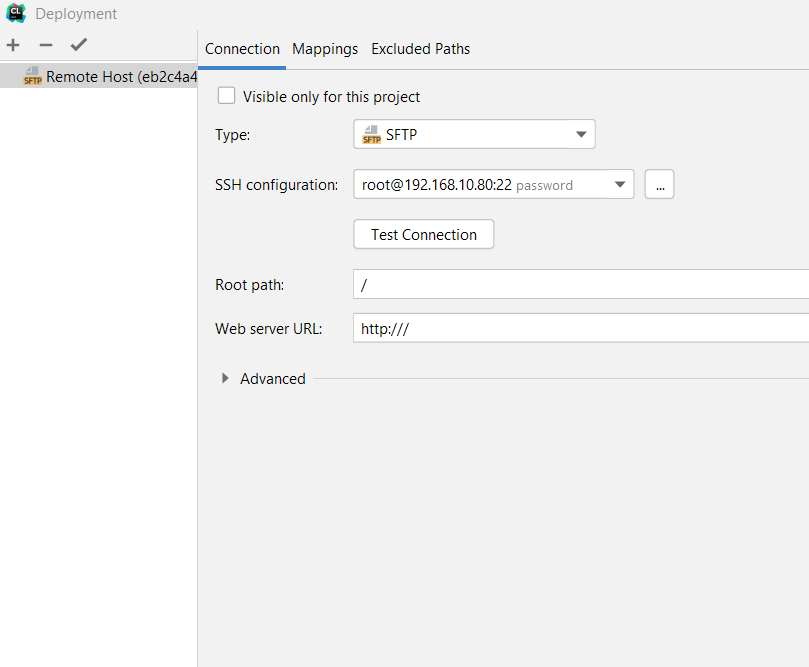
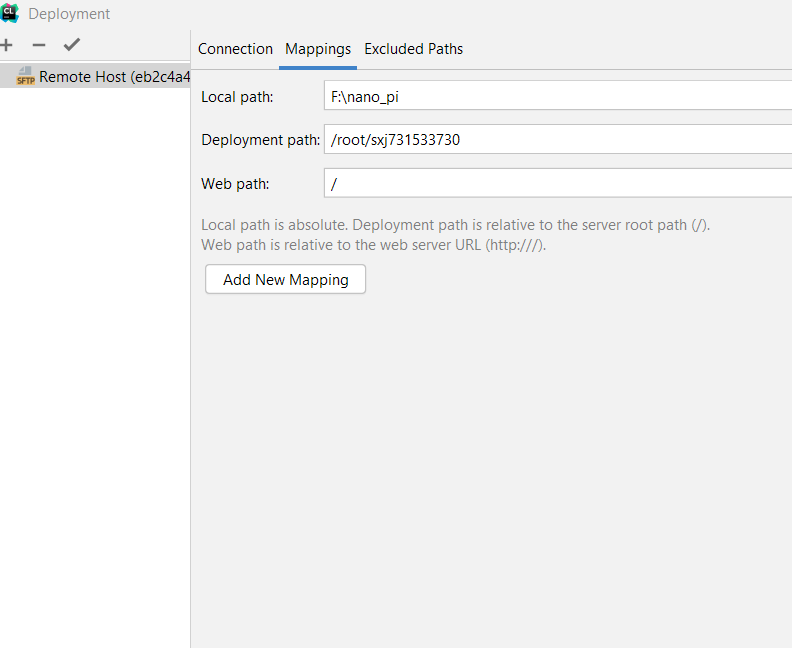
测试一下远程调用代码,可用测试代码 main.cpp
#include <iostream>
int main() {
std::cout << "Hello, World!" << std::endl;
return 0;
}
测试结果
/root/sxj731533730/cmake-build-debug/nano_pi
Hello, World!
Process finished with exit code 0
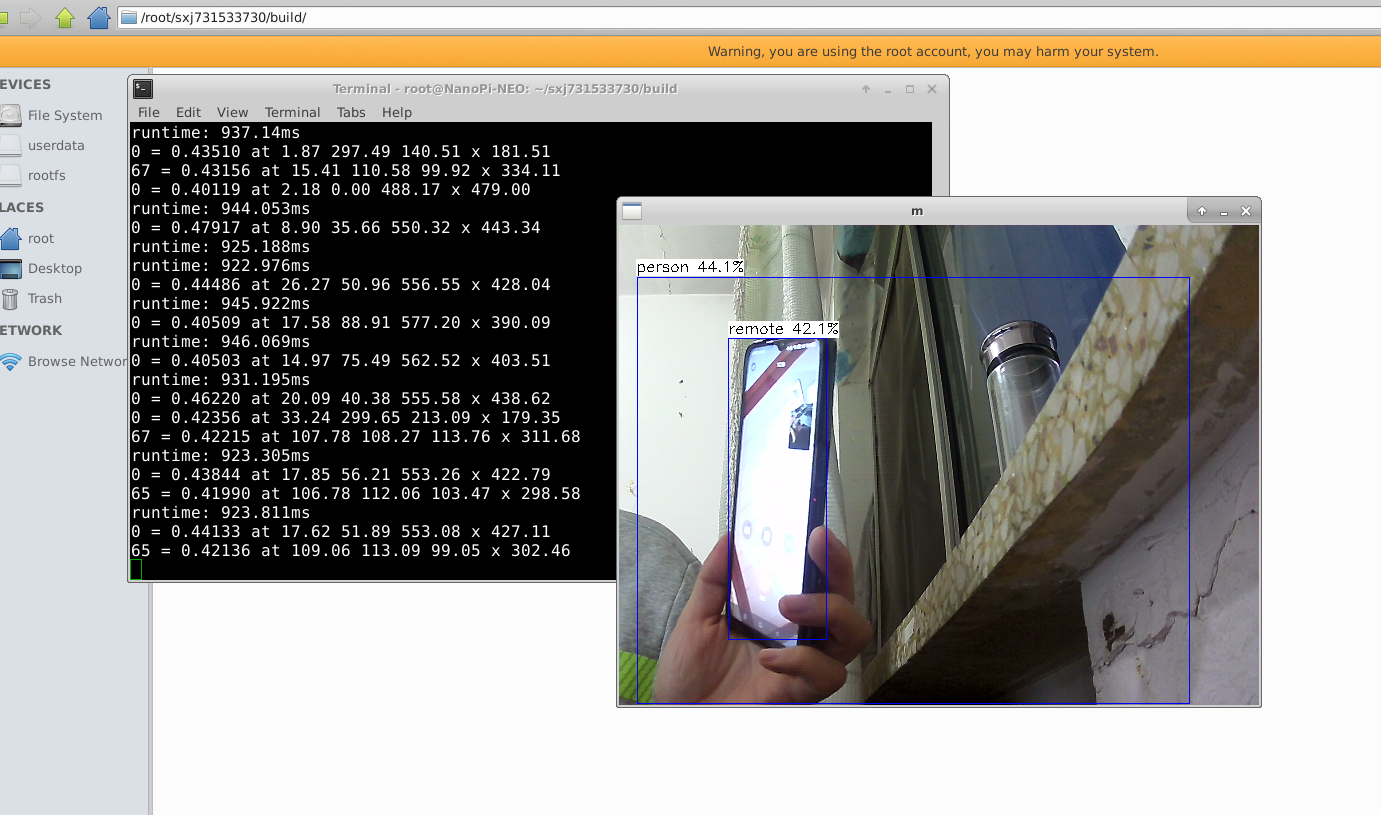
测试一下ncnn+nanodet,然后将代码集成到视频流代码中吧,官方例子是makefile ......
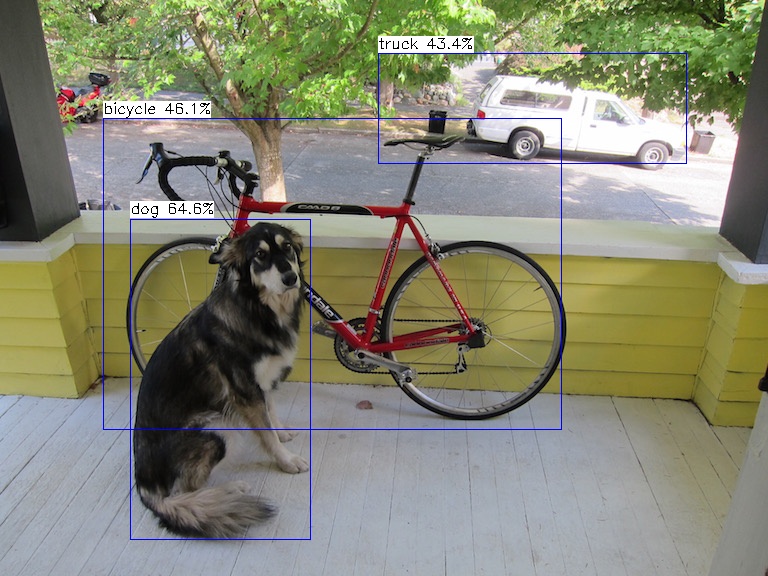
(1)先测试那只狗

cmakelists.txt 这里用的交叉编译库.a
cmake_minimum_required(VERSION 3.5)
project(nano_pi)
set(CMAKE_CXX_STANDARD 14)
set(CMAKE_CXX_FLAGS "${CMAKE_CXX_FLAGS} -fopenmp")
set(CMAKE_C_FLAGS "${CMAKE_C_FLAGS} -fopenmp")
include_directories(${CMAKE_SOURCE_DIR}/include/ncnn)
include_directories(${CMAKE_SOURCE_DIR}/include)
#导入ncnn
add_library(libncnn STATIC IMPORTED)
set_target_properties(libncnn PROPERTIES IMPORTED_LOCATION ${CMAKE_SOURCE_DIR}/lib/libncnn.a)
find_package(OpenCV REQUIRED)
set(CMAKE_CXX_STANDARD 11)
add_executable(nano_pi main.cpp)
target_link_libraries(nano_pi libncnn ${OpenCV_LIBS})测试代码
#include <iostream>
#include<time.h>
#include "net.h"
#if defined(USE_NCNN_SIMPLEOCV)
#include "simpleocv.h"
#else
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv2/imgproc/imgproc.hpp>
#endif
#include <stdlib.h>
#include <float.h>
#include <stdio.h>
#include <vector>
struct Object
{
cv::Rect_<float> rect;
int label;
float prob;
};
static inline float intersection_area(const Object& a, const Object& b)
{
cv::Rect_<float> inter = a.rect & b.rect;
return inter.area();
}
static void qsort_descent_inplace(std::vector<Object>& faceobjects, int left, int right)
{
int i = left;
int j = right;
float p = faceobjects[(left + right) / 2].prob;
while (i <= j)
{
while (faceobjects[i].prob > p)
i++;
while (faceobjects[j].prob < p)
j--;
if (i <= j)
{
// swap
std::swap(faceobjects[i], faceobjects[j]);
i++;
j--;
}
}
#pragma omp parallel sections
{
#pragma omp section
{
if (left < j) qsort_descent_inplace(faceobjects, left, j);
}
#pragma omp section
{
if (i < right) qsort_descent_inplace(faceobjects, i, right);
}
}
}
static void qsort_descent_inplace(std::vector<Object>& faceobjects)
{
if (faceobjects.empty())
return;
qsort_descent_inplace(faceobjects, 0, faceobjects.size() - 1);
}
static void nms_sorted_bboxes(const std::vector<Object>& faceobjects, std::vector<int>& picked, float nms_threshold)
{
picked.clear();
const int n = faceobjects.size();
std::vector<float> areas(n);
for (int i = 0; i < n; i++)
{
areas[i] = faceobjects[i].rect.width * faceobjects[i].rect.height;
}
for (int i = 0; i < n; i++)
{
const Object& a = faceobjects[i];
int keep = 1;
for (int j = 0; j < (int)picked.size(); j++)
{
const Object& b = faceobjects[picked[j]];
// intersection over union
float inter_area = intersection_area(a, b);
float union_area = areas[i] + areas[picked[j]] - inter_area;
// float IoU = inter_area / union_area
if (inter_area / union_area > nms_threshold)
keep = 0;
}
if (keep)
picked.push_back(i);
}
}
static void generate_proposals(const ncnn::Mat& cls_pred, const ncnn::Mat& dis_pred, int stride, const ncnn::Mat& in_pad, float prob_threshold, std::vector<Object>& objects)
{
const int num_grid = cls_pred.h;
int num_grid_x;
int num_grid_y;
if (in_pad.w > in_pad.h)
{
num_grid_x = in_pad.w / stride;
num_grid_y = num_grid / num_grid_x;
}
else
{
num_grid_y = in_pad.h / stride;
num_grid_x = num_grid / num_grid_y;
}
const int num_class = cls_pred.w;
const int reg_max_1 = dis_pred.w / 4;
for (int i = 0; i < num_grid_y; i++)
{
for (int j = 0; j < num_grid_x; j++)
{
const int idx = i * num_grid_x + j;
const float* scores = cls_pred.row(idx);
// find label with max score
int label = -1;
float score = -FLT_MAX;
for (int k = 0; k < num_class; k++)
{
if (scores[k] > score)
{
label = k;
score = scores[k];
}
}
if (score >= prob_threshold)
{
ncnn::Mat bbox_pred(reg_max_1, 4, (void*)dis_pred.row(idx));
{
ncnn::Layer* softmax = ncnn::create_layer("Softmax");
ncnn::ParamDict pd;
pd.set(0, 1); // axis
pd.set(1, 1);
softmax->load_param(pd);
ncnn::Option opt;
opt.num_threads = 1;
opt.use_packing_layout = false;
softmax->create_pipeline(opt);
softmax->forward_inplace(bbox_pred, opt);
softmax->destroy_pipeline(opt);
delete softmax;
}
float pred_ltrb[4];
for (int k = 0; k < 4; k++)
{
float dis = 0.f;
const float* dis_after_sm = bbox_pred.row(k);
for (int l = 0; l < reg_max_1; l++)
{
dis += l * dis_after_sm[l];
}
pred_ltrb[k] = dis * stride;
}
float pb_cx = (j + 0.5f) * stride;
float pb_cy = (i + 0.5f) * stride;
float x0 = pb_cx - pred_ltrb[0];
float y0 = pb_cy - pred_ltrb[1];
float x1 = pb_cx + pred_ltrb[2];
float y1 = pb_cy + pred_ltrb[3];
Object obj;
obj.rect.x = x0;
obj.rect.y = y0;
obj.rect.width = x1 - x0;
obj.rect.height = y1 - y0;
obj.label = label;
obj.prob = score;
objects.push_back(obj);
}
}
}
}
static int detect_nanodet(const cv::Mat& bgr, std::vector<Object>& objects)
{
ncnn::Net nanodet;
nanodet.opt.use_vulkan_compute = true;
// nanodet.opt.use_bf16_storage = true;
// original pretrained model from https://github.com/RangiLyu/nanodet
// the ncnn model https://github.com/nihui/ncnn-assets/tree/master/models
nanodet.load_param("../model/nanodet_m.param");
nanodet.load_model("../model/nanodet_m.bin");
int width = bgr.cols;
int height = bgr.rows;
const int target_size = 320;
const float prob_threshold = 0.4f;
const float nms_threshold = 0.5f;
// pad to multiple of 32
int w = width;
int h = height;
float scale = 1.f;
if (w > h)
{
scale = (float)target_size / w;
w = target_size;
h = h * scale;
}
else
{
scale = (float)target_size / h;
h = target_size;
w = w * scale;
}
ncnn::Mat in = ncnn::Mat::from_pixels_resize(bgr.data, ncnn::Mat::PIXEL_BGR, width, height, w, h);
// pad to target_size rectangle
int wpad = (w + 31) / 32 * 32 - w;
int hpad = (h + 31) / 32 * 32 - h;
ncnn::Mat in_pad;
ncnn::copy_make_border(in, in_pad, hpad / 2, hpad - hpad / 2, wpad / 2, wpad - wpad / 2, ncnn::BORDER_CONSTANT, 0.f);
const float mean_vals[3] = {103.53f, 116.28f, 123.675f};
const float norm_vals[3] = {0.017429f, 0.017507f, 0.017125f};
in_pad.substract_mean_normalize(mean_vals, norm_vals);
ncnn::Extractor ex = nanodet.create_extractor();
ex.input("input.1", in_pad);
std::vector<Object> proposals;
// stride 8
{
ncnn::Mat cls_pred;
ncnn::Mat dis_pred;
ex.extract("792", cls_pred);
ex.extract("795", dis_pred);
std::vector<Object> objects8;
generate_proposals(cls_pred, dis_pred, 8, in_pad, prob_threshold, objects8);
proposals.insert(proposals.end(), objects8.begin(), objects8.end());
}
// stride 16
{
ncnn::Mat cls_pred;
ncnn::Mat dis_pred;
ex.extract("814", cls_pred);
ex.extract("817", dis_pred);
std::vector<Object> objects16;
generate_proposals(cls_pred, dis_pred, 16, in_pad, prob_threshold, objects16);
proposals.insert(proposals.end(), objects16.begin(), objects16.end());
}
// stride 32
{
ncnn::Mat cls_pred;
ncnn::Mat dis_pred;
ex.extract("836", cls_pred);
ex.extract("839", dis_pred);
std::vector<Object> objects32;
generate_proposals(cls_pred, dis_pred, 32, in_pad, prob_threshold, objects32);
proposals.insert(proposals.end(), objects32.begin(), objects32.end());
}
// sort all proposals by score from highest to lowest
qsort_descent_inplace(proposals);
// apply nms with nms_threshold
std::vector<int> picked;
nms_sorted_bboxes(proposals, picked, nms_threshold);
int count = picked.size();
objects.resize(count);
for (int i = 0; i < count; i++)
{
objects[i] = proposals[picked[i]];
// adjust offset to original unpadded
float x0 = (objects[i].rect.x - (wpad / 2)) / scale;
float y0 = (objects[i].rect.y - (hpad / 2)) / scale;
float x1 = (objects[i].rect.x + objects[i].rect.width - (wpad / 2)) / scale;
float y1 = (objects[i].rect.y + objects[i].rect.height - (hpad / 2)) / scale;
// clip
x0 = std::max(std::min(x0, (float)(width - 1)), 0.f);
y0 = std::max(std::min(y0, (float)(height - 1)), 0.f);
x1 = std::max(std::min(x1, (float)(width - 1)), 0.f);
y1 = std::max(std::min(y1, (float)(height - 1)), 0.f);
objects[i].rect.x = x0;
objects[i].rect.y = y0;
objects[i].rect.width = x1 - x0;
objects[i].rect.height = y1 - y0;
}
return 0;
}
static void draw_objects(const cv::Mat& bgr, const std::vector<Object>& objects)
{
static const char* class_names[] = {
"person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light",
"fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow",
"elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee",
"skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove", "skateboard", "surfboard",
"tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana", "apple",
"sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake", "chair", "couch",
"potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard", "cell phone",
"microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase", "scissors", "teddy bear",
"hair drier", "toothbrush"
};
cv::Mat image = bgr.clone();
for (size_t i = 0; i < objects.size(); i++)
{
const Object& obj = objects[i];
fprintf(stderr, "%d = %.5f at %.2f %.2f %.2f x %.2fn", obj.label, obj.prob,
obj.rect.x, obj.rect.y, obj.rect.width, obj.rect.height);
cv::rectangle(image, obj.rect, cv::Scalar(255, 0, 0));
char text[256];
sprintf(text, "%s %.1f%%", class_names[obj.label], obj.prob * 100);
int baseLine = 0;
cv::Size label_size = cv::getTextSize(text, cv::FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
int x = obj.rect.x;
int y = obj.rect.y - label_size.height - baseLine;
if (y < 0)
y = 0;
if (x + label_size.width > image.cols)
x = image.cols - label_size.width;
cv::rectangle(image, cv::Rect(cv::Point(x, y), cv::Size(label_size.width, label_size.height + baseLine)),
cv::Scalar(255, 255, 255), -1);
cv::putText(image, text, cv::Point(x, y + label_size.height),
cv::FONT_HERSHEY_SIMPLEX, 0.5, cv::Scalar(0, 0, 0));
}
cv::imwrite("image.jpg",image);
// cv::imshow("image", image);
// cv::waitKey(0);
}
int main(int argc, char** argv)
{
cv::Mat m = cv::imread("../dog.jpg");
if (m.empty())
{
return -1;
}
clock_t start_t,finish_t;
double total_t = 0;
start_t = clock();
std::vector<Object> objects;
detect_nanodet(m, objects);
finish_t = clock();
total_t = (double)(finish_t - start_t) ;//将时间转换为秒
printf("runtime %f msn", total_t);
draw_objects(m, objects);
return 0;
}测试结果
/root/sxj731533730/cmake-build-debug/nano_pi
runtime 850.795ms
16 = 0.64556 at 130.38 218.80 180.83 x 321.38
1 = 0.46087 at 103.48 118.24 458.68 x 311.99
7 = 0.43419 at 378.29 53.21 308.82 x 111.28
Process finished with exit code 0
测试图 这友善开发板测试时间有点长。。。
实测代码
第六步、先进行串口调试,然后在完成自己的任务
测试代码,测试结果
root@NanoPi-NEO:~/sxj731533730# stty -F /dev/ttyS0 speed 115200 cs8 -parenb -cstopb -echo
115200
root@NanoPi-NEO:~/sxj731533730# echo "666" > /dev/ttyS0
root@NanoPi-NEO:~/sxj731533730# echo "6666" > /dev/ttyS0测试结果
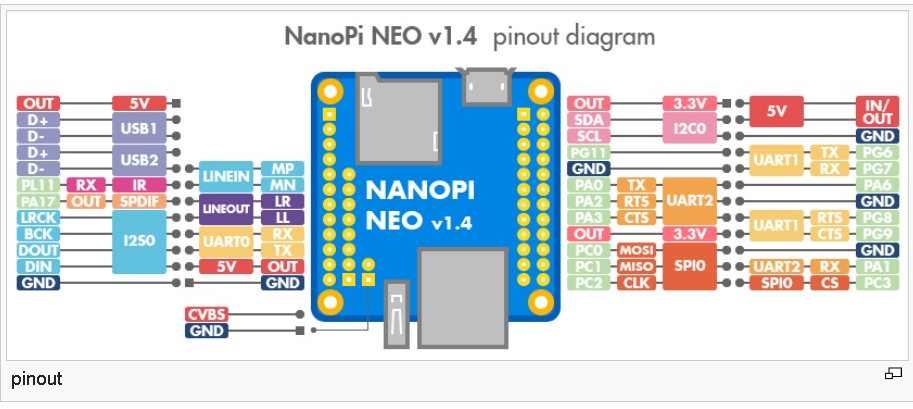
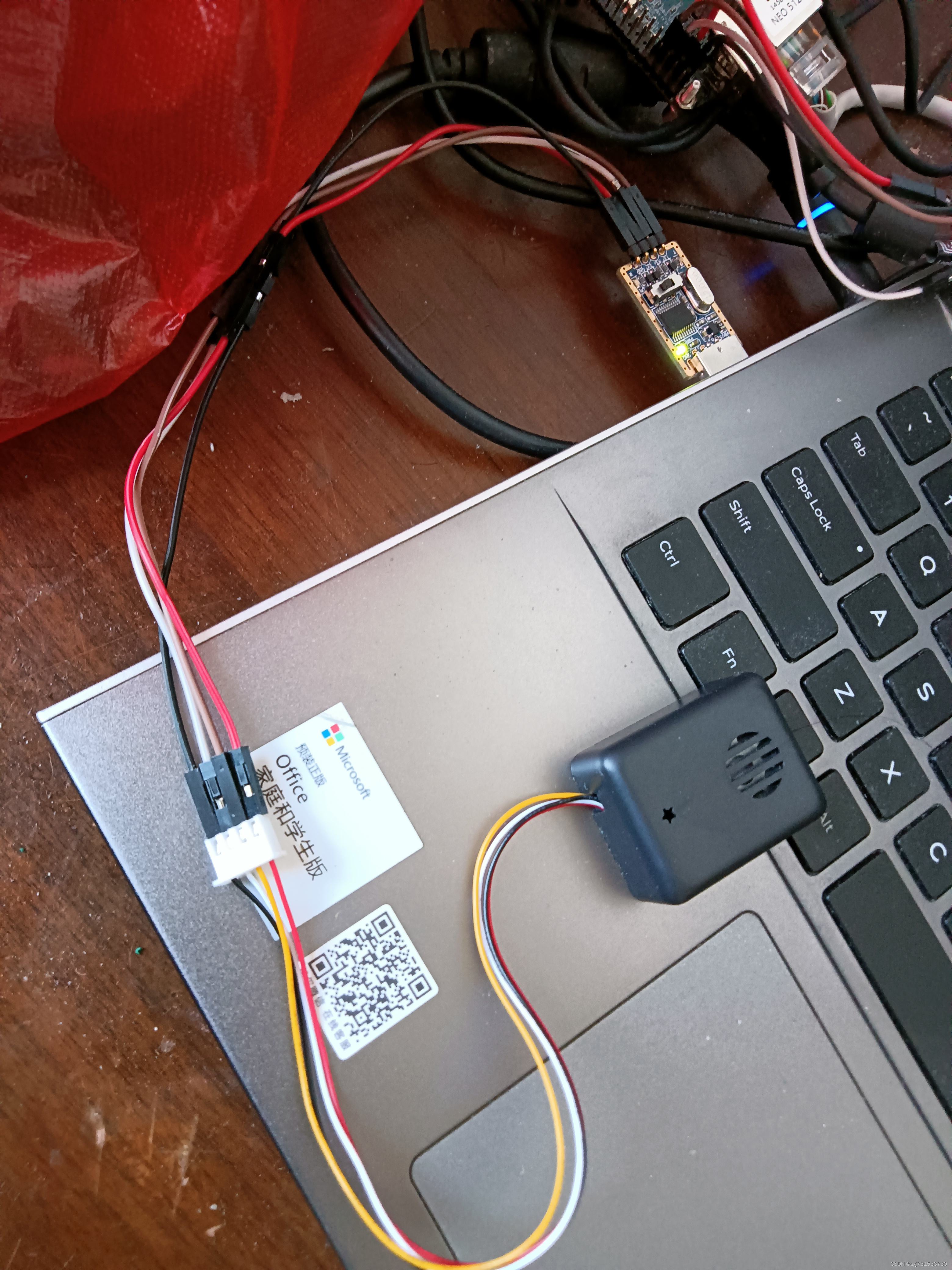
开发板的连线方式示意图
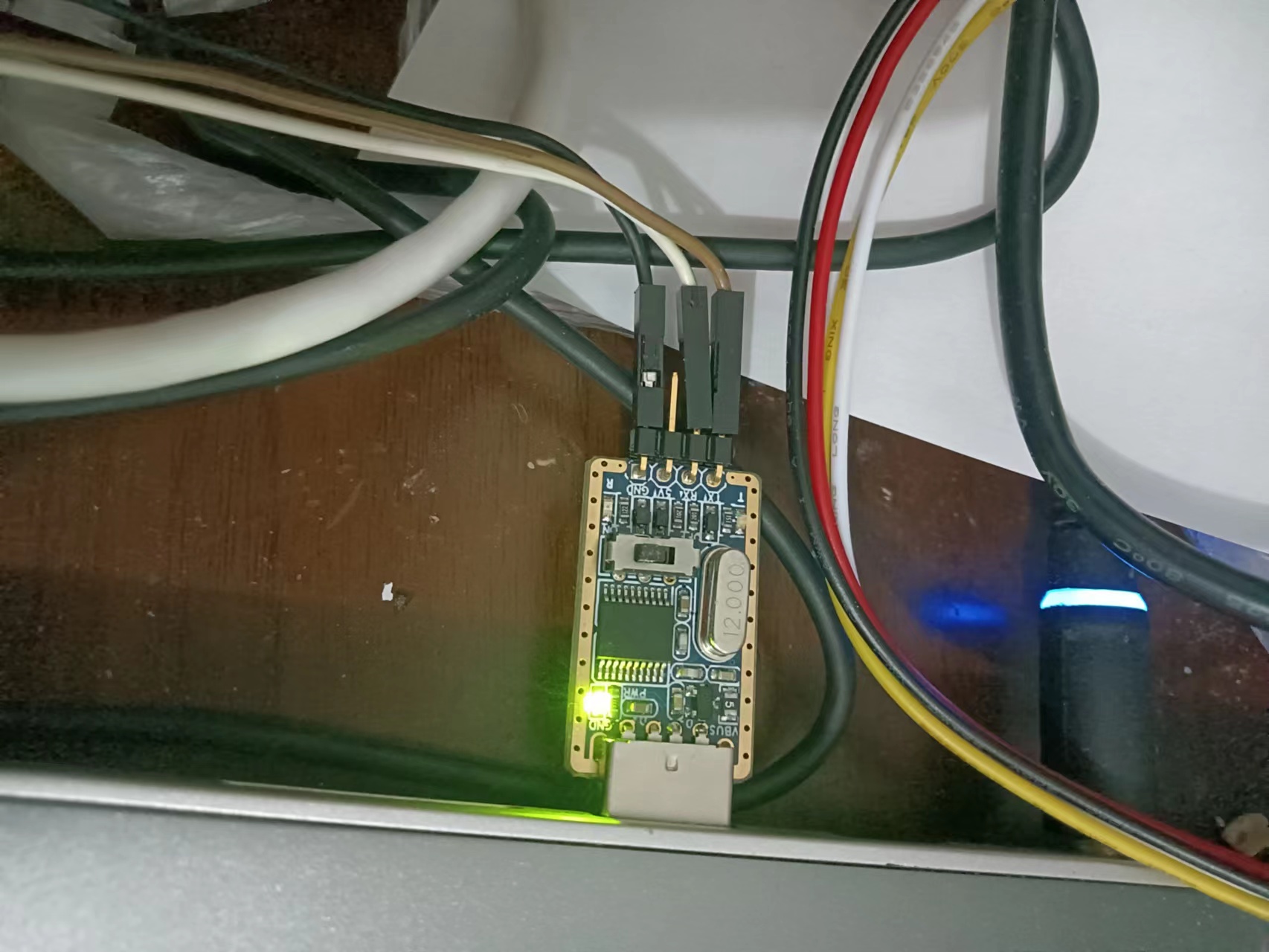
注意(以usb转ttl为基准)GND--GND(黑色)VCC-VCC(红色,可以不连) RX--TX(白色) TX-RX(灰色)
使用代码进行测试 window11+clion+远程+ int sendSerialPort(const char *W_BUF)
#include <chrono>
#include <sys/stat.h>
#include <fcntl.h>
#include <termios.h>
#include <unistd.h>
#include<unistd.h>
#include<stdio.h>
#include<sys/types.h>
#include<sys/stat.h>
#include <iostream>
#include <cstring>
using namespace std;
int sendSerialPort(const unsigned char W_BUF[], int length) {
int tty_fd = -1;
int rv = -1;
struct termios options;
tty_fd = open("/dev/ttyS0", O_RDWR | O_NOCTTY | O_NDELAY); //打开串口设备
fcntl(tty_fd, F_SETFL, 0);
if (tty_fd < 0) {
printf("open tty failed:%sn", strerror(errno));
close(tty_fd);
return -1;
}
printf("open devices sucessful!n");
memset(&options, 0, sizeof(options));
rv = tcgetattr(tty_fd, &options); //获取原有的串口属性的配置
if (rv != 0) {
printf("tcgetattr() failed:%sn", strerror(errno));
close(tty_fd);
return -1;
}
options.c_cflag |= (CLOCAL | CREAD); // CREAD 开启串行数据接收,CLOCAL并打开本地连接模式
options.c_cflag &= ~CSIZE;// 先使用CSIZE做位屏蔽
options.c_cflag |= CS8; //设置8位数据位
options.c_cflag &= ~PARENB; //无校验位
cfsetispeed(&options, B9600);
cfsetospeed(&options, B9600);
options.c_cflag &= ~CSTOPB;
options.c_cc[VTIME] = 0;
options.c_cc[VMIN] = 0;
tcflush(tty_fd, TCIFLUSH);
if ((tcsetattr(tty_fd, TCSANOW, &options)) != 0) {
printf("tcsetattr failed:%sn", strerror(errno));
close(tty_fd);
return -1;
}
std::cout << std::endl << "length= " << length << std::endl;
rv = write(tty_fd, W_BUF, length);
if(rv<=0) /* 出错了*/
{
if (errno == EINTR) /* 中断错误 我们继续写*/
{
close(tty_fd);
printf("[SeanSend]error errno==EINTR continuen");
} else if (errno == EAGAIN) /* EAGAIN : Resource temporarily unavailable*/
{
sleep(1);//等待一秒,希望发送缓冲区能得到释放
close(tty_fd);
printf("[SeanSend]error errno==EAGAIN continuen");
} else /* 其他错误 没有办法,只好退了*/
{
printf("[SeanSend]ERROR: errno = %d, strerror = %s n", errno, strerror(errno));
return (-1);
}
}
if (rv < 0) {
printf("Write() error:%sn", strerror(errno));
close(tty_fd);
return -1;
}
for (int i = 0; i < length; i++) {
std::cout << std::hex << (int) W_BUF[i] << " ";
}
close(tty_fd);
printf("nWrite() successfullyn");
return 0;
}
int main(int argc, char **argv) {
//0xFD 0x00 0x07 0x01 0x01 0xD6 0xB1 0xD0 0xD0 0x9D //直行
//0xFD 0x00 0x07 0x01 0x01 0xD7 0xF3 0xD7 0xAA 0xA3 //左转
//0xFD 0x00 0x07 0x01 0x01 0xD3 0xD2 0xD7 0xAA 0x86 //右转
while(true){
const unsigned char data[][10] = {{0xFD, 0x00, 0x07, 0x01, 0x01, 0xD6, 0xB1, 0xD0, 0xD0, 0x9D},
{0xFD, 0x00, 0x07, 0x01, 0x01, 0xD7, 0xF3, 0xD7, 0xAA, 0xA3},
{0xFD, 0x00, 0x07, 0x01, 0x01, 0xD3, 0xD2, 0xD7, 0xAA, 0x86}};
sendSerialPort(data[0], sizeof(data[0]));//测试
}
return 0;
}测试结果,一步步来,先完成这种串口传递数据到pc端
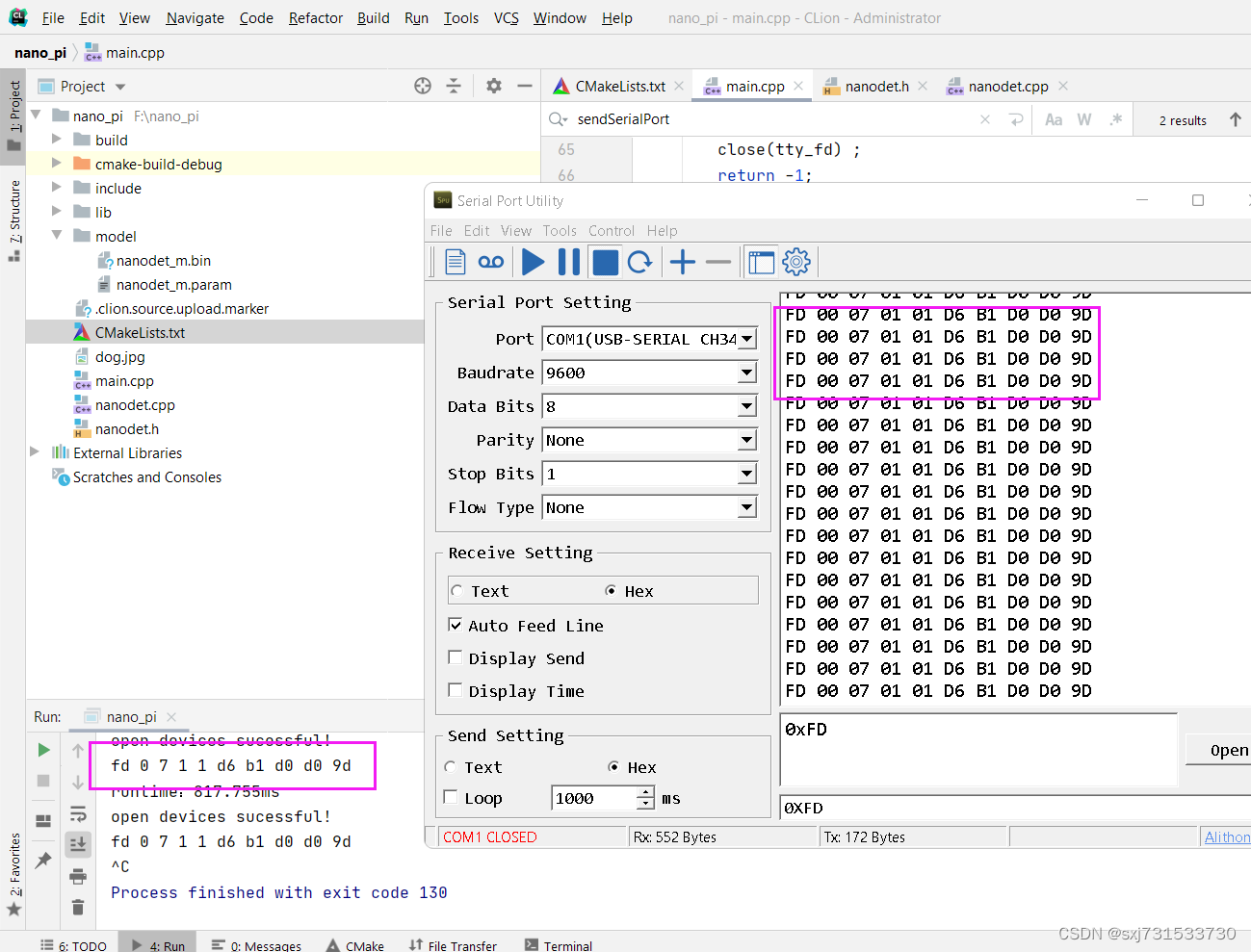
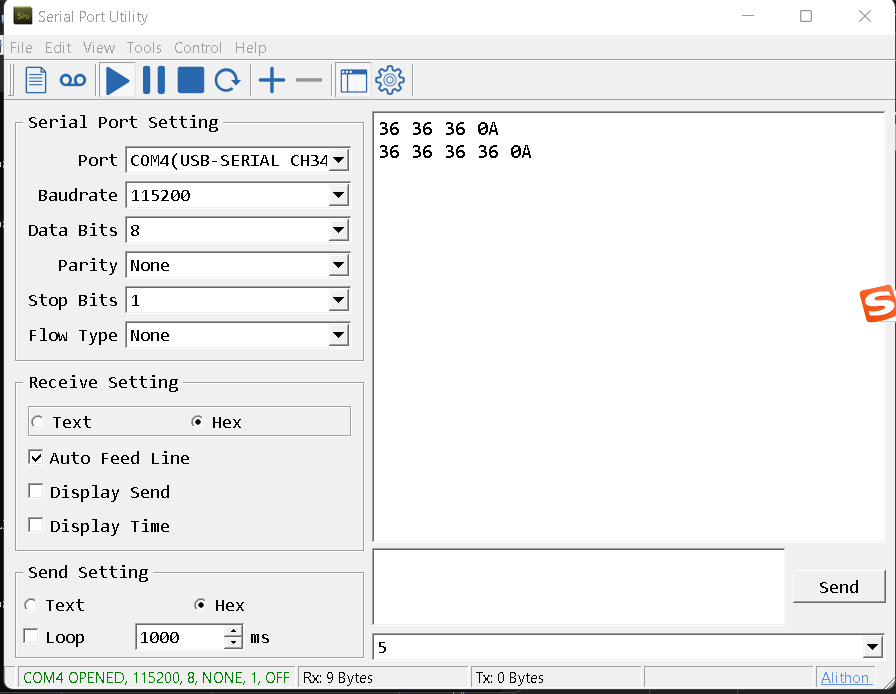
第七步、根据检测目标、驱动小喇叭语音播放,先在pc端验证串口命令;先使用官方《SYN6288语音合成模块资料(绿深旗舰店)》提供的控制台输入“直行”命令,查看发送的指令 购买链接
https://detail.tmall.com/item.htm?spm=a230r.1.14.29.499b4e15oWRrq4&id=636100723867&ns=1&abbucket=3&skuId=4720393766430
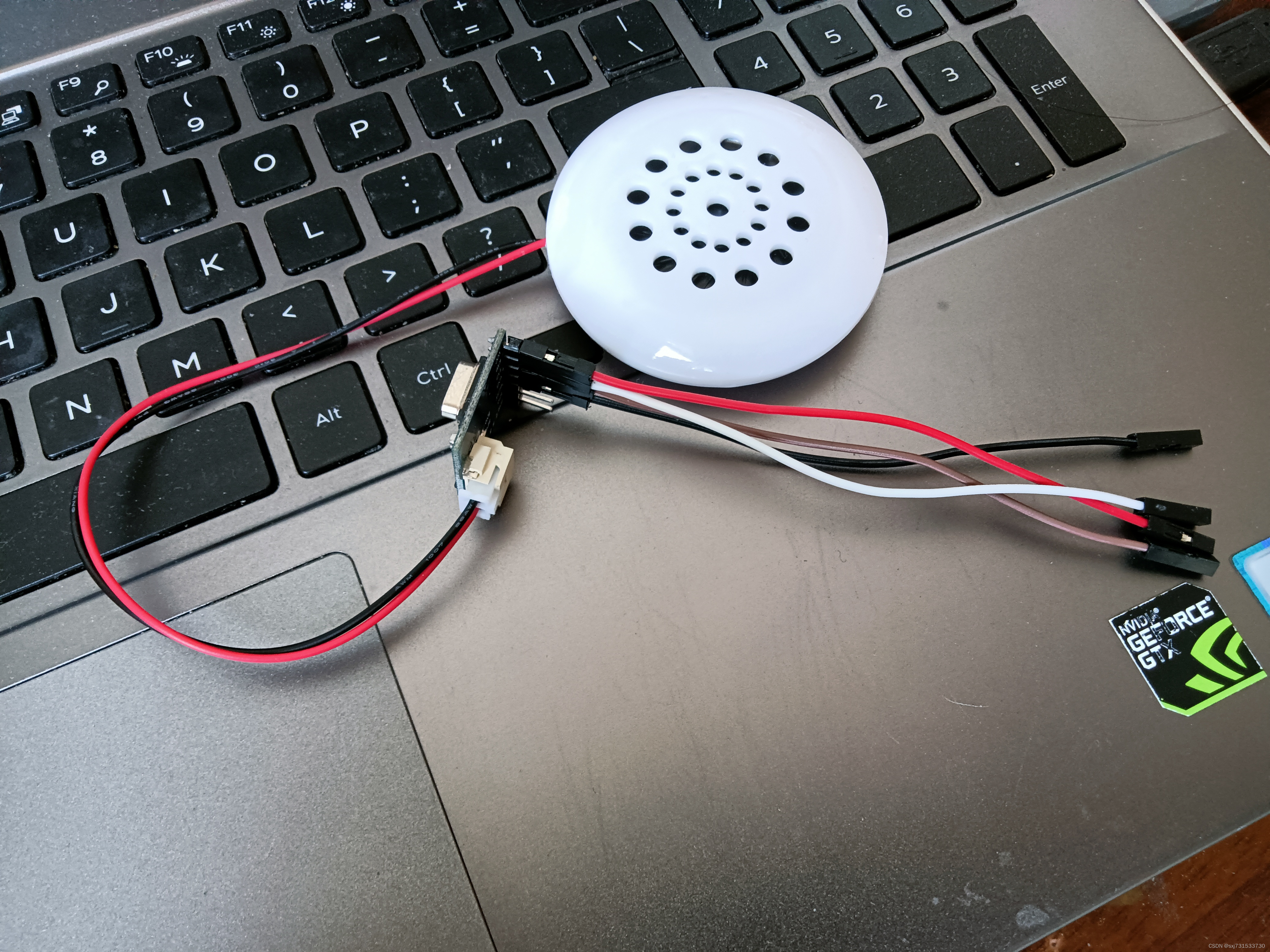
喇叭模样
上位机软件

然后使用串口工具进行发送验证
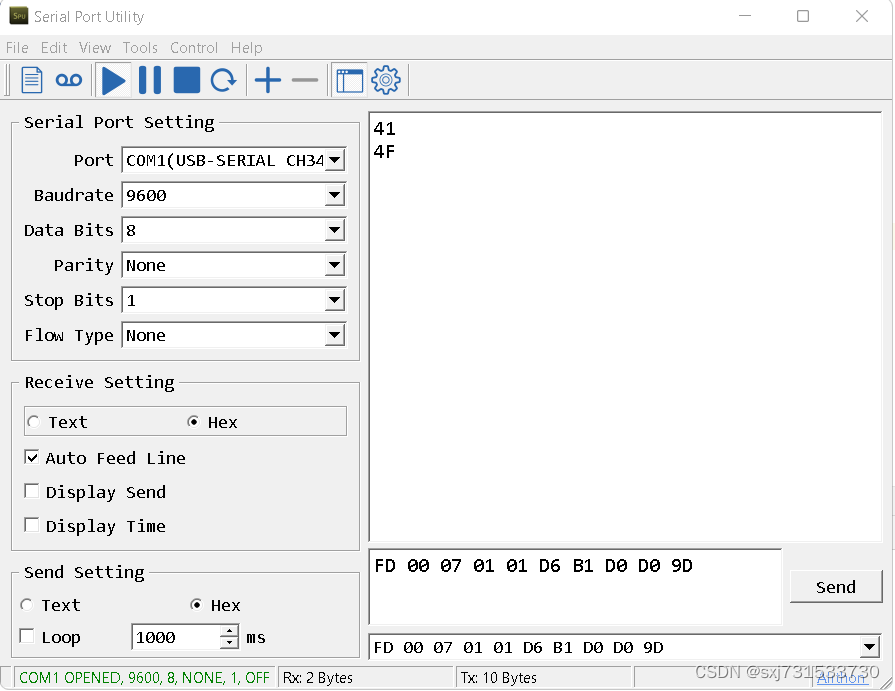
验证没有问题,可以播放直行的语音提播放 直行

测试代码 语音模块也没啥问题,保证接线正确即可GND--GND(黑色)VCC-VCC(红色,可以不连) RX--TX(白色) TX-RX(灰色)
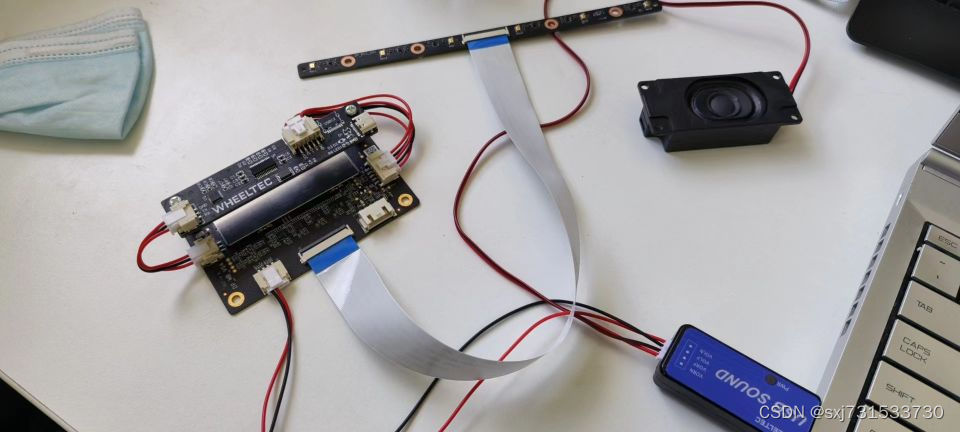
使用这个喇叭也可以https://detail.tmall.com/item.htm?spm=a230r.1.14.11.499b4e15oWRrq4&id=565603673443&ns=1&abbucket=3 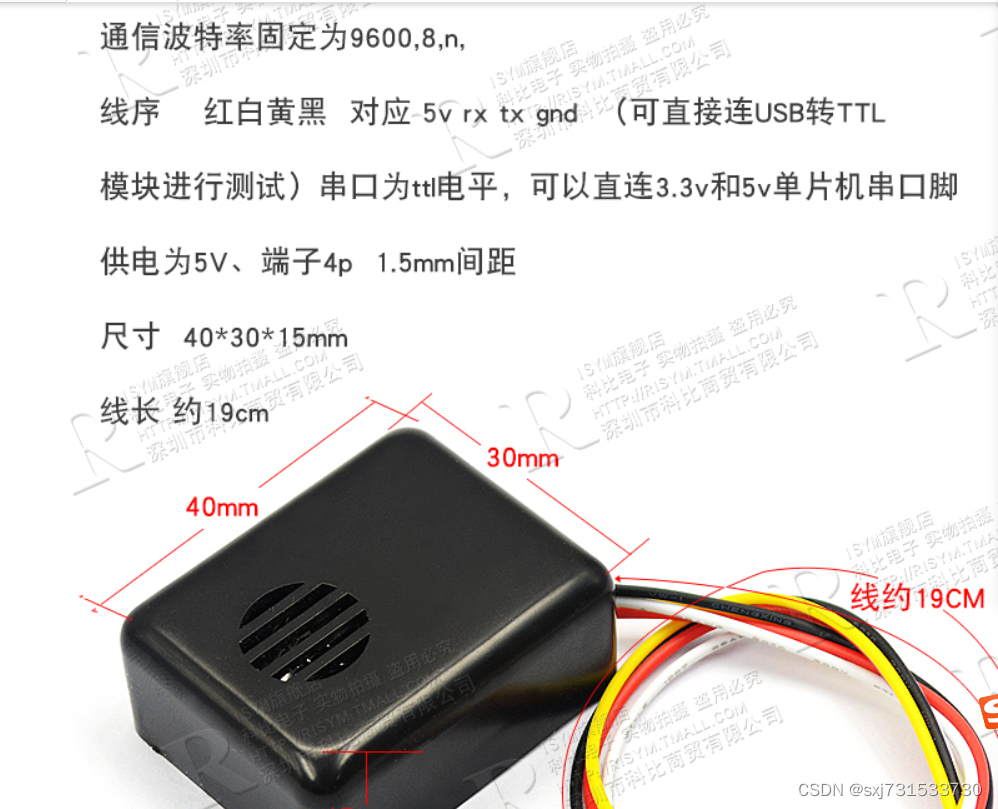
线序和测试没啥问题
命令和串口测试如上,不重复贴了
第八步、最后实现我们意图
#include <stdio.h>
#include <algorithm>
#include <vector>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <iostream>
#include "net.h"
#include <fcntl.h>
#include <termios.h>
#include <unistd.h>
#include<unistd.h>
#include<stdio.h>
#include<sys/types.h>
#include<sys/stat.h>
#include <iostream>
#include <cstring>
#include <cv.h>
#if NCNN_VULKAN
#include "gpu.h"
#endif // NCNN_VULKAN
ncnn::Net shufflenetv2;
int sendSerialPort(const char W_BUF[], int length) {
int tty_fd = -1;
int rv = -1;
struct termios options;
tty_fd = open("/dev/ttyS0", O_RDWR | O_NOCTTY | O_NDELAY); //打开串口设备
fcntl(tty_fd, F_SETFL, 0);
if (tty_fd < 0) {
printf("open tty failed:%sn", strerror(errno));
close(tty_fd);
return -1;
}
printf("open devices sucessful!n");
memset(&options, 0, sizeof(options));
rv = tcgetattr(tty_fd, &options); //获取原有的串口属性的配置
if (rv != 0) {
printf("tcgetattr() failed:%sn", strerror(errno));
close(tty_fd);
return -1;
}
options.c_cflag |= (CLOCAL | CREAD); // CREAD 开启串行数据接收,CLOCAL并打开本地连接模式
options.c_cflag &= ~CSIZE;// 先使用CSIZE做位屏蔽
options.c_cflag |= CS8; //设置8位数据位
options.c_cflag &= ~PARENB; //无校验位
cfsetispeed(&options, B9600);
cfsetospeed(&options, B9600);
options.c_cflag &= ~CSTOPB;
options.c_cc[VTIME] = 0;
options.c_cc[VMIN] = 0;
tcflush(tty_fd, TCIFLUSH);
if ((tcsetattr(tty_fd, TCSANOW, &options)) != 0) {
printf("tcsetattr failed:%sn", strerror(errno));
close(tty_fd);
return -1;
}
std::cout << std::endl << "length= " << length << std::endl;
rv = write(tty_fd, W_BUF, length);
if(rv<=0) /* 出错了*/
{
if (errno == EINTR) /* 中断错误 我们继续写*/
{
close(tty_fd);
printf("[SeanSend]error errno==EINTR continuen");
} else if (errno == EAGAIN) /* EAGAIN : Resource temporarily unavailable*/
{
sleep(1);//等待一秒,希望发送缓冲区能得到释放
close(tty_fd);
printf("[SeanSend]error errno==EAGAIN continuen");
} else /* 其他错误 没有办法,只好退了*/
{
printf("[SeanSend]ERROR: errno = %d, strerror = %s n", errno, strerror(errno));
return (-1);
}
}
if (rv < 0) {
printf("Write() error:%sn", strerror(errno));
close(tty_fd);
return -1;
}
for (int i = 0; i < length; i++) {
std::cout << std::hex << (int) W_BUF[i] << " ";
}
close(tty_fd);
printf("nWrite() successfullyn");
return 0;
}
int detect_squeezenet( cv::Mat &bgr, std::vector<float> &cls_scores) {
ncnn::Mat in = ncnn::Mat::from_pixels_resize(bgr.data, ncnn::Mat::PIXEL_BGR2RGB, bgr.cols, bgr.rows,320,320);
//按照pytorch样例进行标准化
const float mean_vals[3] = {0.485f, 0.456f, 0.406f};
const float std_vals[3] = {1 / 0.229f, 1 / 0.224f, 1 / 0.225f};
const float norm_255[3] = {1 / 255.0f, 1 / 255.0f, 1 / 255.0f};
// in.substract_mean_normalize(mean_vals, std_vals);
in.substract_mean_normalize(0, norm_255);
in.substract_mean_normalize(mean_vals, std_vals);
fprintf(stderr, "input shape: %d %d %d %dn", in.dims, in.h, in.w, in.c);
ncnn::Extractor ex = shufflenetv2.create_extractor();
ex.input("input", in);//input 是 .param文件中输入节点名称
ncnn::Mat out;
ex.extract("output", out);
fprintf(stderr, "output shape: %d %d %d %dn", out.dims, out.h, out.w, out.c);
cls_scores.resize(out.w);
std::vector<float> index_vec;
for (int j = 0; j < out.w; j++) {
cls_scores[j] = out[j];
index_vec.push_back(cls_scores[j]);
printf("cls_scores[%d]=%fn", j, cls_scores[j]);
}
int maxValue = *max_element(index_vec.begin(), index_vec.end());
int maxPosition = max_element(index_vec.begin(), index_vec.end()) - index_vec.begin();
std::cout << "road type: " << maxPosition << " conf: " << maxValue << std::endl;
cv::putText(bgr,"road type: "+std::to_string(maxPosition), cv::Point2d(0,40), cv::FONT_HERSHEY_PLAIN, 2, cv::Scalar(255,0,0));
return maxPosition;
}
int main(int argc, char **argv) {
shufflenetv2.load_param("../model/model-75.param");
shufflenetv2.load_model("../model/model-75.bin");
// cv::VideoCapture cap(0); //0 摄像头
cv::VideoCapture cap("/root/sxj731533730/nano_pi_1/a.mp4"); //0 摄像头
if (!cap.isOpened()) {
std::cout << "open camera fail" << std::endl;
return -1;
}
cv::Mat m;
//0xFD 0x00 0x07 0x01 0x01 0xD6 0xB1 0xD0 0xD0 0x9D //直行
//0xFD 0x00 0x07 0x01 0x01 0xD7 0xF3 0xD7 0xAA 0xA3 //左转
//0xFD 0x00 0x07 0x01 0x01 0xD3 0xD2 0xD7 0xAA 0x86 //右转
const char data[][14] = {{0xFD,0x00 ,0x0B ,0x01 ,0x01 ,0xD6 ,0xB1 ,0xD0 ,0xD0 ,0xC3 ,0xA4 ,0xB5 ,0xC0 ,0x83},
{0xFD ,0x00 ,0x0B ,0x01 ,0x01 ,0xD7 ,0xF3 ,0xD7 ,0xAA ,0xC3 ,0xA4 ,0xB5 ,0xC0 ,0xBD},
{0xFD ,0x00 ,0x0B ,0x01 ,0x01 ,0xD3 ,0xD2 ,0xD7 ,0xAA ,0xC3 ,0xA4 ,0xB5 ,0xC0 ,0x98 },
{0xFD ,0x00 ,0x0B ,0x01 ,0x01 ,0xC6 ,0xD5 ,0xCD ,0xA8 ,0xB5 ,0xC0 ,0xC2 ,0xB7 ,0x80 }};
int k=0;
while (true) {
cap >> m;
//
//cv::Mat m = cv::imread("../dog.jpg");
if (m.empty()) {
return -1;
}
std::vector<float> cls_scores;
int maxPosition= detect_squeezenet(m, cls_scores);
imshow("m", m);
cv::waitKey(1);
if(k++%10==0){
sendSerialPort(data[maxPosition], sizeof(data[maxPosition]));//测试
}
if(k==1000) k=0;
}
cap.release();
return 0;
}第九步、接收语音模块我用的这个设备,代码是例程中的改改即可,实现了语音唤醒,然后进行目标检测和播报https://item.taobao.com/item.htm?spm=a1z09.2.0.0.1ad22e8dZZKiG4&id=633822976782&_u=b2jrsof5b32c
参考
NanoPi NEO/zh - FriendlyELEC WiKi
https://wiki.friendlyelec.com/wiki/index.php/NanoPi_NEO/zh
https://dl.friendlyelec.com/nanopineo
Install PyTorch on Jetson Nano - Q-engineering
最后
以上就是高贵面包最近收集整理的关于26、使用友善NanoPi NEO和外设硬件实现语音唤醒功能、目标检测功能、语音播报功能的全部内容,更多相关26、使用友善NanoPi内容请搜索靠谱客的其他文章。








发表评论 取消回复