原创声明:
本原创教程由芯驿电子科技(上海)有限公司(ALINX)创作,版权归本公司所有,如需转载,需授权并注明出处。
时序逻辑
组合逻辑电路在逻辑功能上特点是任意时刻的输出仅仅取决于当前时刻的输入,与电路原来的状态无关。而时序逻辑在逻辑功能上的特点是任意时刻的输出不仅仅取决于当前的输入信号,而且还取决于电路原来的状态。下面以典型的时序逻辑分析。
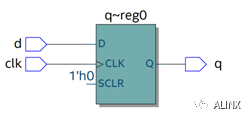
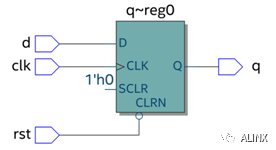
D触发器
D触发器在时钟的上升沿或下降沿存储数据,输出与时钟跳变之前输入信号的状态相同。
代码如下激励文件如下
module top(d, clk, q);
input d ;
input clk ;
outputreg q ;
always@(posedge clk)
begin
q <= d ;
end
endmodule
`timescale1 ns/1 ns
module top_tb();
reg d ;
reg clk ;
wire q ;
initial
begin
d =0;
clk =0;
forever
begin
#({$random}%100)
d =~d ;
end
end
always#10 clk =~clk ;
top t0(.d(d),.clk(clk),.q(q));
endmodule
RTL图表示如下
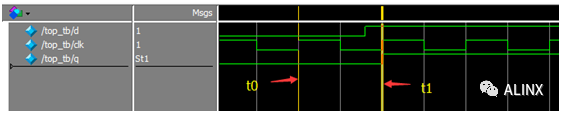
仿真结果如下,可以看到在t0时刻时,d的值为0,则q的值也为0;在t1时刻d发生了变化,值为1,那么q相应也发生了变化,值变为1。可以看到在t0-t1之间的一个时钟周期内,无论输入信号d的值如何变化,q的值是保持不变的,也就是有存储的功能,保存的值为在时钟的跳变沿时d的值。
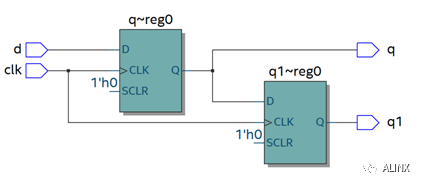
两级D触发器
软件是按照两级D触发器的模型进行时序分析的,具体可以分析在同一时刻两个D触发器输出的数据有何不同,其RTL图如下:
代码如下:激励文件如下:
module top(d, clk, q, q1);
input d ;
input clk ;
outputreg q ;
outputreg q1 ;
always@(posedge clk)
begin
q <= d ;
end
always@(posedge clk)
begin
q1 <= q ;
end
endmodule
`timescale1 ns/1 ns
module top_tb();
reg d ;
reg clk ;
wire q ;
wire q1 ;
initial
begin
d =0;
clk =0;
forever
begin
#({$random}%100)
d =~d ;
end
end
always#10 clk =~clk ;
top
t0(.d(d),.clk(clk),.q(q),.q1(q1));
endmodule
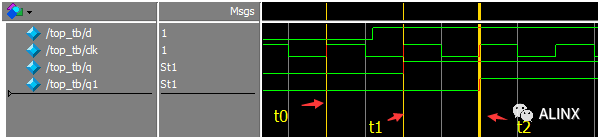
仿真结果如下,可以看到t0时刻,d为0,q输出为0,t1时刻,q随着d的数据变化而变化,而此时钟跳变之前q的值仍为0,那么q1的值仍为0,t2时刻,时钟跳变前q的值为1,则q1的值相应为1,q1相对于q落后一个周期。
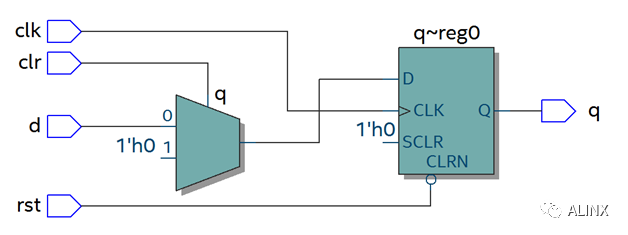
带异步复位的D触发器
异步复位是指独立于时钟,一旦异步复位信号有效,就触发复位操作。这个功能在写代码时会经常用到,用于给信号复位,初始化。其RTL图如下:
代码如下,注意要把异步复位信号放在敏感列表里,如果是低电平复位,即为negedge,如果是高电平复位,则是posedge
module top(d, rst, clk, q);
input d ;
input rst ;
input clk ;
outputreg q ;
always@(posedge clk ornegedge rst)
begin
if(rst ==1'b0)
q <=0;
else
q <= d ;
end
endmodule
`timescale1 ns/1 ns
module top_tb();
reg d ;
reg rst ;
reg clk ;
wire q ;
initial
begin
d =0;
clk =0;
forever
begin
#({$random}%100)
d =~d ;
end
end
initial
begin
rst =0;
#200 rst =1;
end
always#10 clk =~clk ;
top
t0(.d(d),.rst(rst),.clk(clk),.q(q));
endmodule
仿真结果如下,可以看到在复位信号之前,虽然输入信号d数据有变化,但由于正处于复位状态,输入信号q始终为0,在复位之后q的值就正常了。

带异步复位同步清零的D触发器
前面讲到异步复位独立于时钟操作,而同步清零则是同步于时钟信号下操作的,当然也不仅限于同步清零,也可以是其他的同步操作,其RTL图如下:
代码如下,不同于异步复位,同步操作不能把信号放到敏感列表里
module top(d, rst, clr, clk, q);
input d ;
input rst ;
input clr ;
input clk ;
outputreg q ;
always@(posedge clk ornegedge rst)
begin
if(rst ==1'b0)
q <=0;
elseif(clr ==1'b1)
q <=0;
else
q <= d ;
end
endmodule
`timescale1 ns/1 ns
module top_tb();
reg d ;
reg rst ;
reg clr ;
reg clk ;
wire q ;
initial
begin
d =0;
clk =0;
forever
begin
#({$random}%100)
d =~d ;
end
end
initial
begin
rst =0;
clr =0;
#200 rst =1;
#200 clr =1;
#100 clr =0;
end
always#10 clk =~clk ;
top
t0(.d(d),.rst(rst),.clr(clr),.clk(clk),
.q(q));
endmodule
仿真结果如下,可以看到clr信号拉高后,q没有立即清零,而是在下个clk上升沿之后执行清零操作,也就是clr同步于clk。

移位寄存器
移位寄存器是指在每个时钟脉冲来时,向左或向右移动一位,由于D触发器的特性,数据输出同步于时钟边沿,其结构如下,每个时钟来临,每个D触发器的输出q等于前一个D触发器输出的值,从而实现移位的功能。

代码实现:
module top(d, rst, clk, q);
input d ;
input rst ;
input clk ;
outputreg[7:0] q ;
always@(posedge clk ornegedge rst)
begin
if(rst ==1'b0)
q <=0;
else
q <={q[6:0], d};//向左移位//q <= {d, q[7:1]} ; //向右移位end
endmodule
激励文件:
`timescale1 ns/1 ns
module top_tb();
reg d ;
reg rst ;
reg clk ;
wire[7:0] q ;
initial
begin
d =0;
clk =0;
forever
begin
#({$random}%100)
d =~d ;
end
end
initial
begin
rst =0;
#200 rst =1;
end
always#10 clk =~clk ;
top
t0(.d(d),.rst(rst),.clk(clk),.q(q));
endmodule
仿真结果如下,可以看到复位之后,每个clk上升沿左移一位

单口RAM
单口RAM的写地址与读地址共用一个地址,代码如下,其中reg [7:0] ram [63:0]意思是定义了64个8位宽度的数据。其中定义了addr_reg,可以保持住读地址,延迟一周期之后将数据送出。
module top
(
input[7:0] data,
input[5:0] addr,
input wr,
input clk,
output[7:0] q
);
reg[7:0] ram[63:0];//declare ram reg[5:0] addr_reg;//addr register
always@(posedge clk)
begin
if(wr)//write ram[addr]<= data;
addr_reg <= addr;
end
assign q = ram[addr_reg];//read data endmodule
`timescale1 ns/1 ns
module top_tb();
reg[7:0] data ;
reg[5:0] addr ;
reg wr ;
reg clk ;
wire[7:0] q ;
initial
begin
data =0;
addr =0;
wr =1;
clk =0;
end
always#10 clk =~clk ;
always@(posedge clk)
begin
data <= data +1'b1;
addr <= addr +1'b1;
end
top t0(.data(data),
.addr(addr),
.clk(clk),
.wr(wr),
.q(q));
endmodule
仿真结果如下,可以看到q的输出与写入的数据一致

伪双口RAM
伪双口RAM的读写地址是独立的,可以随机选择写或读地址,同时进行读写操作。代码如下,在激励文件中定义了en信号,在其有效时发送读地址。
module top
(
input[7:0] data,
input[5:0] write_addr,
input[5:0] read_addr,
input wr,
input rd,
input clk,
outputreg[7:0] q
);
reg[7:0] ram[63:0];//declare ram reg[5:0] addr_reg;//addr register
always@(posedge clk)
begin
if(wr)//write ram[write_addr]<= data;
if(rd)//read q <= ram[read_addr];
end
endmodule
`timescale1 ns/1 ns
module top_tb();
reg[7:0] data ;
reg[5:0] write_addr ;
reg[5:0] read_addr ;
reg wr ;
reg clk ;
reg rd ;
wire[7:0] q ;
initial
begin
data =0;
write_addr =0;
read_addr =0;
wr =0;
rd =0;
clk =0;
#100 wr =1;
#20 rd =1;
end
always#10 clk =~clk ;
always@(posedge clk)
begin
if(wr)
begin
data <= data +1'b1;
write_addr <= write_addr +1'b1;
if(rd)
read_addr <= read_addr +1'b1;
end
end
top t0(.data(data),
.write_addr(write_addr),
.read_addr(read_addr),
.clk(clk),
.wr(wr),
.rd(rd),
.q(q));
endmodule
仿真结果如下,可以看到在rd有效时,对读地址进行操作,读出数据

真双口RAM
真双口RAM有两套控制线,数据线,允许两个系统对其进行读写操作,代码如下:
module top
(
input[7:0] data_a, data_b,
input[5:0] addr_a, addr_b,
input wr_a, wr_b,
input rd_a, rd_b,
input clk,
outputreg[7:0] q_a, q_b
);
reg[7:0] ram[63:0];//declare ram
//Port A always@(posedge clk)
begin
if(wr_a)//write begin
ram[addr_a]<= data_a;
q_a <= data_a ;
end
if(rd_a)
//read q_a <= ram[addr_a];
end
//Port B always@(posedge clk)
begin
if(wr_b)//write begin
ram[addr_b]<= data_b;
q_b <= data_b ;
end
if(rd_b)
//read q_b <= ram[addr_b];
end
endmodule
`timescale1 ns/1 ns
module top_tb();
reg[7:0] data_a, data_b ;
reg[5:0] addr_a, addr_b ;
reg wr_a, wr_b ;
reg rd_a, rd_b ;
reg clk ;
wire[7:0] q_a, q_b ;
initial
begin
data_a =0;
data_b =0;
addr_a =0;
addr_b =0;
wr_a =0;
wr_b =0;
rd_a =0;
rd_b =0;
clk =0;
#100 wr_a =1;
#100 rd_b =1;
end
always#10 clk =~clk ;
always@(posedge clk)
begin
if(wr_a)
begin
data_a <= data_a +1'b1;
addr_a <= addr_a +1'b1;
end
else
begin
data_a <=0;
addr_a <=0;
end
end
always@(posedge clk)
begin
if(rd_b)
begin
addr_b <= addr_b +1'b1;
end
else addr_b <=0;
end
top
t0(.data_a(data_a),.data_b(data_b),
.addr_a(addr_a),.addr_b(addr_b
),
.wr_a(wr_a),.wr_b(wr_b),
.rd_a(rd_a),.rd_b(rd_b),
.clk(clk),
.q_a(q_a),.q_b(q_b));
endmodule
仿真结果如下

单口ROM
ROM是用来存储数据的,可以按照下列代码形式初始化ROM,但这种方法处理大容量的ROM就比较麻烦,建议用FPGA自带的ROM IP核实现,并添加初始化文件。
代码实现
moduletop
(
input[3:0] addr,
input clk,
outputreg[7:0] q
);
always@(posedge clk)
begin
case(addr)
4'd0: q <=8'd15;
4'd1: q <=8'd24;
4'd2: q <=8'd100;
4'd3: q <=8'd78;
4'd4: q <=8'd98;
4'd5: q <=8'd105;
4'd6: q <=8'd86;
4'd7: q <=8'd254;
4'd8: q <=8'd76;
4'd9: q <=8'd35;
4'd10: q <=8'd120;
4'd11: q <=8'd85;
4'd12: q <=8'd37;
4'd13: q <=8'd19;
4'd14: q <=8'd22;
4'd15: q <=8'd67;
default: q <=8'd0;
endcase
end
endmodule
`timescale1 ns/1 ns
module top_tb();
reg[3:0] addr ;
reg clk ;
wire[7:0] q ;
initial
begin
addr =0;
clk =0;
end
always#10 clk =~clk ;
always@(posedge clk)
begin
addr <= addr +1'b1;
end
top t0(.addr(addr),
.clk(clk),
.q(q));
endmodule
仿真结果如下

有限状态机
在verilog里经常会用到有限状态机,处理相对复杂的逻辑,设定好不同的状态,根据触发条件跳转到对应的状态,在不同的状态下做相应的处理。有限状态机主要用到always及case语句。下面以一个四状态的有限状态机举例说明。
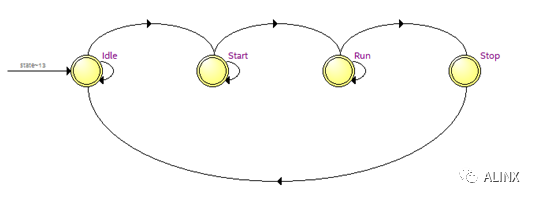
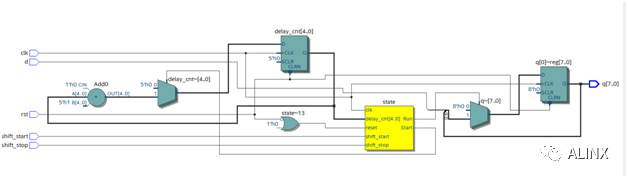
在程序中设计了8位的移位寄存器,在Idle状态下,判断shift_start信号是否为高,如果为高,进入Start状态,在Start状态延迟100个周期,进入Run状态,进行移位处理,如果shift_stop信号有效了,进入Stop状态,在Stop状态,清零q的值,再跳转到Idle状态。
Mealy有限状态机,输出不仅与当前状态有关,也与输入信号有关,在RTL中会与输入信号有连接。
module top
(
input shift_start,
input shift_stop,
input rst,
input clk,
input d,
outputreg[7:0] q
);
parameter Idle =2'd0;//Idle state parameter Start =2'd1;//Start state parameter Run =2'd2;//Run state parameter Stop =2'd3;//Stop state
reg[1:0] state ;//statement reg[4:0] delay_cnt ;//delay counter
always@(posedge clk ornegedge rst)
begin
if(!rst)
begin
state <= Idle ;
delay_cnt <=0;
q <=0;
end
else
case(state)
Idle :begin
if(shift_start)
state <= Start ;
end
Start :begin
if(delay_cnt ==5'd99)
begin
delay_cnt <=0;
state <= Run ;
end
else
delay_cnt <= delay_cnt +1'b1;
end
Run :begin
if(shift_stop)
state <= Stop ;
else
q <={q[6:0], d};
end
Stop :begin
q <=0;
state <= Idle ;
end
default: state <= Idle ;
endcase
end
endmodule
Moore有限状态机,输出只与当前状态有关,与输入信号无关,输入信号只影响状态的改变,不影响输出,比如对delay_cnt和q的处理,只与state状态有关。
module top
(
input shift_start,
input shift_stop,
input rst,
input clk,
input d,
outputreg[7:0] q
);
parameter Idle =2'd0;//Idle state parameter Start =2'd1;//Start state parameter Run =2'd2;//Run state parameter Stop =2'd3;//Stop state
reg[1:0] current_state ;//statement reg[1:0] next_state ;
reg[4:0] delay_cnt ;//delay counter //First part: statement transition always@(posedge clk ornegedge rst)
begin
if(!rst)
current_state <= Idle ;
else
current_state <= next_state ;
end
//Second part: combination logic, judge statement transition condition always@(*)
begin
case(current_state)
Idle :begin
if(shift_start)
next_state <= Start ;
else
next_state <= Idle ;
end
Start :begin
if(delay_cnt ==5'd99)
next_state <= Run ;
else
next_state <= Start ;
end
Run :begin
if(shift_stop)
next_state <= Stop ;
else
next_state <= Run ;
end
Stop : next_state <= Idle ;
default:next_state <= Idle ;
endcase
end
//Last part: output data always@(posedge clk ornegedge rst)
begin
if(!rst)
delay_cnt <=0;
elseif(current_state == Start)
delay_cnt <= delay_cnt +1'b1;
else
delay_cnt <=0;
end
always@(posedge clk ornegedge rst)
begin
if(!rst)
q <=0;
elseif(current_state == Run)
q <={q[6:0], d};
else
q <=0;
end
endmodule
在上面两个程序中用到了两种方式的写法,第一种的Mealy状态机,采用了一段式的写法,只用了一个always语句,所有的状态转移,判断状态转移条件,数据输出都在一个always语句里,缺点是如果状态太多,会使整段程序显的冗长。第二个Moore状态机,采用了三段式的写法,状态转移用了一个always语句,判断状态转移条件是组合逻辑,采用了一个always语句,数据输出也是单独的 always语句,这样写起来比较直观清晰,状态很多时也不会显得繁琐。
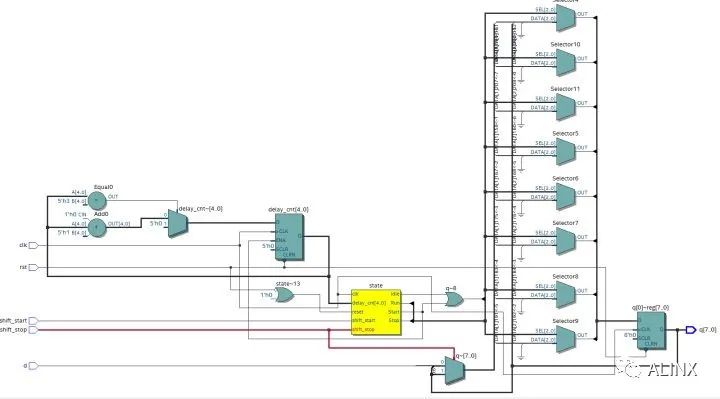
Mealy有限状态机RTL图
Moore有限状态机RTL图
激励文件如下:
`timescale1 ns/1 ns
module top_tb();
reg shift_start ;
reg shift_stop ;
reg rst ;
reg clk ;
reg d ;
wire[7:0] q ;
initial
begin
rst =0;
clk =0;
d =0;
#200 rst =1;
forever
begin
#({$random}%100)
d =~d ;
end
end
initial
begin
shift_start =0;
shift_stop =0;
#300 shift_start =1;
#1000 shift_start =0;
shift_stop =1;
#50 shift_stop =0;
end
always#10 clk =~clk ;
top t0
(
.shift_start(shift_start),
.shift_stop(shift_stop),
.rst(rst),
.clk(clk),
.d(d),
.q(q)
);
endmodule
仿真结果如下:

总结
本文档介绍了组合逻辑以及时序逻辑中常用的模块,其中有限状态机较为复杂,但经常用到,希望大家能够深入理解,在代码中多运用,多思考,有利于快速提升水平。
最后
以上就是勤劳季节最近收集整理的关于verilog异步复位jk触发器_【ZYNQ Ultrascale+ MPSOC FPGA教程】第三章 Verilog基础模块介绍 (下)...的全部内容,更多相关verilog异步复位jk触发器_【ZYNQ内容请搜索靠谱客的其他文章。








发表评论 取消回复