雷达原理与系统复习概要
课程目标:
– 认识和理解雷达系统的组成和工作原理
– 掌握雷达系统中天线、发射机、接收机、频综等分系统的工作原理
– 掌握雷达方程、脉冲压缩、信号检测、脉冲多普勒、目标跟踪的基本原理
– 了解雷达技术的应用领域和发展方向
第一课
雷达的概念
• 雷达:无线电检测与测距(RAdio Detection AndRanging)
– 以定向方式将无线电信号发射至空间中,接收物体所反射信号,实现目标的探测和测距
•工作过程:发射-反射-接收-处理
– 发射:雷达发射无线电信号
– 反射:目标反射雷达信号
– 接收:雷达接收目标反射的回波信号
– 处理:处理接收到的回波信号,检测目标有无,测量目标信息
•雷达系统组成:
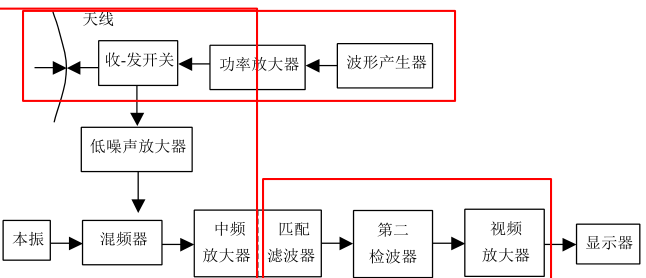
• 发射机
– 产生雷达发射信号
– 激励信号产生、功率放大
•接收机
–对雷达回波信号进行放大、滤波、变频
–产生适合于AD采样和数字信号处理的中频或基带回波信号
• 天线:能量转换器
– 将发射信号辐射到空间中
– 从空间中接收目标回波信号
•信号处理机:雷达信号处理
–实时信号处理 ASIC、FPGA、DSP、Microprocessors
–输出测量结果 距离、角度、速度、雷达图像
•数据处理:高级数据处理
–气象雷达:降水率
–跟踪雷达:目标轨迹
–合成孔径雷达:遥感信息
• 雷达显示器
– A显:距离-功率显示
– P显:Plan-position indicator
• 极坐标显示器
• 距离、方位显示
雷达的分类(按用途)
• 搜索雷达(警戒雷达)
– 用于发现和监视海面、空中目标,与敌我识别系统相配合判定目标的敌我属性,给导弹制导雷达和炮瞄雷达提供目标指示等。
• 跟踪雷达
– 连续跟踪目标并测量目标坐标和运动轨迹的雷达
– 跟踪雷达一般由距离跟踪支路、方位角跟踪支路和仰角跟踪支路组成
– 主要应用于武器控制和导弹靶场测量:在这两种用途中通常都要求有一个高的精度,并对目标的未来位置作精确的预测。
• 气象雷达
• 测控雷达
• 制导雷达
• 合成孔径雷达
– 用雷达与目标的相对运动把尺寸较小的真实天线孔径用数据处理的方法合成一较大的等效天线孔径的雷达,也称综合孔径雷达
雷达的技术优势
• 远距离探测、跟踪 – 最远可达数千公里
• 全天时、全天候工作
• 广域覆盖能力
• 灵活的处理方式– 杂波或干扰信号抑制– 目标精细成像– 快速扫描(相控阵)
第二课 雷达检测原理
主要内容
• 目标检测 • 距离探测 • 角度探测 • 速度探测 • 先进雷达探测技术
1.雷达系统与无线通信系统的异同
• 相同点
– 都是利用无线电或微波信号工作
– 工作过程:调制-发射-接收-解调(检波)
– 都需要使用检测理论
• 不同点
– 收发方式
• 雷达:自发自收
• 通信:我发他收
– 用途
• 雷达:未知目标的检测
• 通信:未知信息的传输
2.雷达的核心功能
• 检测 发现目标是否存在
• 测量 获取目标的详细信息
距离、方位角、俯仰角、速度、航迹、尺寸、类型、材料等
雷达检测原理
• 检测原理– 门限检测
当信号幅度超过一定值时,判定目标存在
滤除噪声信号和干扰信号的影响
• 理想的检测器
– 虚警最小、检测概率最大
– 理想检测器的两个目标是相互矛盾的
• 聂曼-皮尔逊准则(Neyman-Pearson Criterion )
– 给定的虚警率Pfa,通过对似然比L与由虚警率Pfa决定的适当门限T进行比较,使检测概率PD达到最大
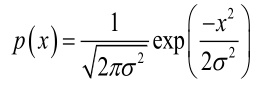
复噪声信号–高斯分布:
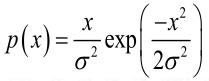
包络检波后的热噪声–瑞利分布:
• 为什么雷达中要使用聂曼-皮尔逊准则?(而不是下面两个准则)
– 贝叶斯准则(最小平均代价准则)
– 最小错误概率准则
通信系统应该采用什么样的检测准则?(最大似然准则)
答:因为雷达的功率有限,要节省资源。
雷达检测的问题和难点
1. 热噪声
2. 杂波(被检测目标外的回波信号)
3. 目标回波信号的起伏(当目标相对于雷达的姿态和角度发生变化时,回波信号会产生显著的起伏)
4. 无源干扰(箔条)
5. 诱饵
• 雷达检测方法
– 恒虚警检测
– 单元平均恒虚警检测
测距原理
– 测量雷达信号往返目标的时间
– 雷达信号的传播速度R=C*T/2
如何实现雷达信号传播时间的测量?
• 雷达信号发射:计数器清零,开始计数
• 雷达信号接收:计数器结束计数
• 计数器计数值×定时周期
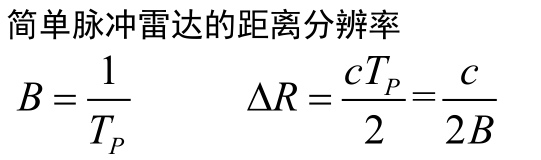
距离分辨率
– 雷达从距离上区分不同目标的能力
测距精度和距离分辨率的区别与联系?
距离分辨率体现的是分辨二个目标的情况;而测距精度反映是一个目标的测量值与真实值之间的误差关系。
联系在于都是雷达性能的参数。
• 测角目的
– 获取目标在空间中的角度信息
• 测角原理
测量方式1--天线方向性 • 幅度-角度敏感
测量方式2--相位-角度敏感
解释:因为波束是平行的,所以如果目标位于中心,雷达回波将同时到达两个天线并且具有相同的相位。另一方面,如果目标与视轴成一定角度,则雷达回波将比另一个天线延迟一定的相位。
三坐标雷达需要什么样的天线?
– 三坐标:距离、方位、俯仰
测速目的
– 测量目标与雷达间的相对速度
– 目标识别、分类
• 测速原理
– 多普勒效应 多普勒频率测量
• FFT处理
如何利用FFT处理实现目标速度的测量?
– 雷达使用脉冲信号工作
• 航迹测量目的
– 测量目标的连续运动轨迹,指示目标未来位置
• 测量原理
– 综合利用历史测量数据• 距离、角度、速度
– 卡尔曼滤波的数据融合
先进雷达探测技术
• 极化测量(极化:电磁波电场振荡方式– 线极化、圆极化、椭圆极化)
• 合成孔径雷达/逆合成孔径雷达
• 干涉合成孔径雷达(使用卫星或飞机搭载的合成孔径雷达系统获取高分辨率地面反射复数影像,每一分辨元的影像信息中不仅含有灰度信息,而且还包含干涉所需的相位信号。)
• 量子雷达(– 基于量子力学基本原理,主要依靠收发量子信号实现目标探测的一种新型雷达)
• 微波光子雷达(– 以光子为信息载体,利用丰富的光谱资源和灵活的光子技术,更好、更快地产生和处理雷达宽带信号,具有快速成像、高分辨率和清晰辨识目标的能力)
区分:dB=10lgN 0 dBm=1 mw 0 dBW =1 w
第三课 天线
天线的作用:发射信号、接收信号
• 天线工作原理
– 实现导行波与自由空间电磁波中间的转换
• 天线的作用
– 发射时将能量集中辐射到某一特定方向;接收时收集目标反射的回波信号。发射和接收天线是互易的,既用于发射又用于接收
• 天线的发明人– 俄国科学家波波夫
• 无线电系统的工作过程
– 发射端,发射机产生的高频振荡电流(能量)经馈电设备输入发射天线,发射天线将高频电流或导波(能量)转变为无线电波—自由电磁波(能量)向周围空间辐射
– 在接收端,无线电波(能量)通过接收天线转变成高频电流或导波(能量)经馈电设备传送到接收机。
天线不但是辐射和接收无线电波的装置,同时也是一个能量转换器,是电路与空间的界面器件
• 天线的场区
– 近场或菲涅尔区:存在切向传播的功率分量
– 远场:所有功率流沿径向向外传播
• 表征天线的主要参数
– 增益
在输入功率相等的条件下,实际天线 最大辐射方向 功率密度 与理想的 全向辐射天线功率密度之比

- 方向性系数D(表示天线向某一个方向集中辐射电磁波程度的参数)
定义:远场区最大辐射方向上的功率密度(辐射强度)与平均功率密度之比
– 方向图(描述天线发出无线电波的强度与方向(角度)之间依赖关系的图形)
表示天线辐射特性的数学函数或图示的空间坐标函数,增益在空间中分布曲线。坐标可以是:极坐标、直角坐标
– 波束宽度Beam Width– 主瓣3dB宽度
与天线的孔径有关
波束宽度与雷达的哪种性能相关?
 波束窄,搜索效率低
波束窄,搜索效率低
– 输入阻抗(天线输入信号电压与电流之比。)
阻抗匹配– 指信号源或者传输线跟负载之间的一种合适的搭配方式
最大功率传递定理
特征阻抗:50欧/75欧/100欧
– 驻波比(行驻波的电压峰值与电压谷值之比,此值可以通过反射系数的模值计算)
VSWR=(1+反射系数模值)/(1-反射系数模值)
– 极化方式
1.同极化接收(涉及到天线的选择)
垂直极化波要用具有垂直极化特性的天线来接收,水平极化波要用具有水平极化特性的天线来接收。右旋圆极化波要用右旋极化特性的天线来接收…
2. 极化完全隔离:正交
3. 去极化(depolarization):目标发射的电磁波一般都不再与入射的电磁波相同
典型雷达天线的分类
• 缝隙天线
在导体面上开缝形成的天线,也称为开槽天线
• 利用多个缝隙可构成缝隙阵
• 应用:微波波段的雷达、导航、电子对抗和通信等设备。能做成共形结构,适用于高速飞行器。
• 喇叭天线
优点:结构简单、频带宽、功率容量大、调整与使用方便。
– 合理的选择喇叭尺寸,可以取得良好的辐射特性:
• 反射面天线
– 抛物面天线(抛物面反射器和位于其焦点上的照射器(馈源)组成的面天线)
球形问题:波束泄露– 馈源辐射特性非理想型导致天线辐射性能下降
辐射效率降低、增益下降
天线方向图恶化
解决方法 馈源赋形辐射
赋形
– 卡塞格伦天线
工作原理
主反射面:旋转抛物面
副反射面:旋转双曲面
双曲面的一个焦点与抛物面的焦点重合,双曲面焦轴与抛物面的焦轴重合,而辐射源位于双曲面的另一焦点上
• 技术特点
(1)主副反射面,便于主面口面场分布最佳化,以提高口面利用系数,改善天线增益;
(2)馈源放置在靠近主面顶点处,大大缩短了馈线长度,结构紧凑,噪声系数低;
(3)双镜面天线用短焦距抛物面实现了长焦距抛物面的性能,缩短了的天线纵向尺寸,解决了单镜面天线中的焦距大时性能好但结构复杂的矛盾;
(4)双曲面反射是扩散型的,返回馈源的能量较单镜面天线要小,从而减弱了对馈源匹配的影响
缺点:副反射面、副反射面的支杆以及馈源会在主反射面上带来遮挡影响,副瓣抬升、增益降低(遮挡和副瓣影响较大)
单脉冲天线
– 能同时提供多个波束,利用单个脉冲回波 形成测向 所需的“和”信号与“差”信号的天线
– 2馈源单脉冲天线
• 将2个馈源安装在焦点附近,照射主反射面,形成有一定偏置的两个波束
比幅单脉冲天线
– 实用的单脉冲天线:4馈源单脉冲
– 能够同时测量俯仰和方位角误差
kα=A-B/A+B 归一化操作,清除幅度信息,测量角度
单脉冲跟踪天线进行角误差测量需要什么前提条件?
答:目标位于波束内。(需要低精度目标搜索雷达指示引导)
• 微带天线
在薄介质基片上,一面附上金属薄层作为接地板,另一面用光刻腐蚀方法制成一定形状的金属贴片,利用微带线或同轴探针对贴片馈电构成的天线。
分类
– ①贴片形状是一细长带条,则为微带振子天线,贴片是一个面积单元时,则为微带天线。
– ②如果把接地板刻出缝隙,而在介质基片的另一面印制出微带线时,缝隙馈电,则构成微带缝隙天线。
特点:体积小,重量轻,低剖面,能与载体(如飞行器)共形;– 电性能多样化,不同设计的微带元,其最大辐射方向可以从边射到端射范围内调整;易于得到各种极化;易集成,能和有源器件、电路集成为统一的组件。
相控阵雷达
– 又称相位阵列雷达,是一种以改变雷达波相位来改变波束方向的雷达,又称电子扫描雷达。
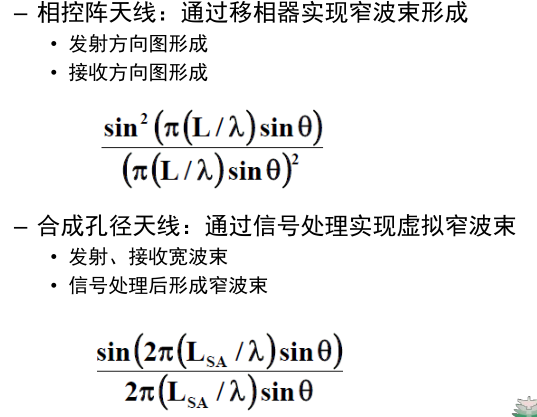
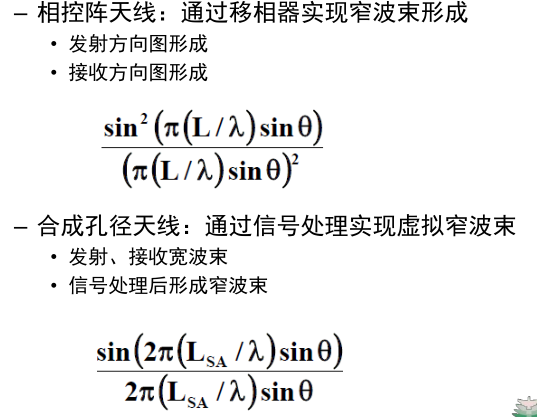
• 相控阵天线
– 通过控制阵列天线中辐射单元的馈电相位来改变方向图形状的天线
相控阵雷达有相当密集的天线阵列,在传统雷达天线面的面积上目前可安装一千多到两千多个相控阵天线。
雷达需要什么样的天线?
– 能够在指定方向上获得高增益,能够在其他方向上实现低增益、抑制干扰或杂波信号
天线增益依赖于天线口径
相控阵天线通过多个小天线合成大口径天线阵列,提供天线辐射性能
天线单元间距设计依赖于天线扫描角度要求
扫描角度越大,天线单元间距越小
线性相控阵阵列:半波长间距能够实现±45度扫描
T/R组件:Transmitter and Receiver module
有源相控阵天线由T/R模块+天线单元组成
无源相控阵天线使用统一的发射机与接收机,外加具有相位控制能力的天线单元
有源相控天线技术特点
– (1)传输效率高、噪声系数低
– (2)降低馈线系统承受高功率的要求
– (3)每个阵元通道上均有一个 T/R 组 件,重复性、可靠性、一致性好
– (4)易于实现共形相控阵天线
– (5)有利于采用 MMIC 单片微波集成电路和 HMIC混合微波集成电路,可提高天线的宽带性能,实现频谱共享的多功能天线阵列,为综合化、标准化电子信息系统(包括雷达、通信和 ESM 等)的实现提供条件。
– (6)成本高
无源相控天线组成原理
– 统一的发射机与接收机,信号经馈线网络自动分配给天线阵的各个辐射器,目标反射信号经馈线网络送入接收机统一放大
• 技术特点
– 技术难度小
– 性能上优于普通雷达、复杂度优于有源相控阵雷达
– 成本低于有源相控阵雷达
• 旁瓣抑制技术(解决 干扰信号通过天线方向图的旁瓣进入接收机)
– 阵列幅度加权
– 不同的加权方式可以获得不同的旁瓣抑制水平
• 阵列误差的影响
– 各TR模块和天线单元存在一致性误差
– 移相器存在相位量化误差
– 损坏TR模块
• 阵列扫描技术
– 相位扫描、延迟线扫描、频率扫描
相控阵天线辐射单元
– 偶极子、波导缝隙、微带天线
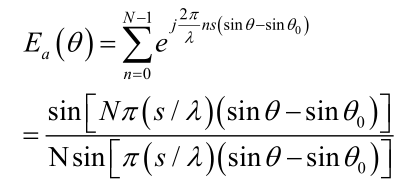
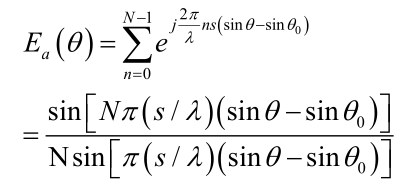
实际相控阵天线的方向图
– 天线单元方向图因子×阵列因子
相控阵天线的馈电
• 馈电的作用
– 发射:将发射信号功率分配至各天线单位
– 接收:将接收信号功率合成
• 强制馈电
– 采用波导、同轴线、微带线等传输线进行功率分配
并联馈电,串联馈电
• 空间馈电
透镜馈电– 利用信号在空间的传播特性实现功率分配
反射式馈电– 利用信号在空间的传播特性实现功率分配
混合体制天线
• 综合采用多种体制
– 相控阵实现快速扫描
– 抛物面实现窄波束
发展:
– 无源相控阵雷达( PESA)
– 有源相控阵雷达( AESA)
– 数字多功能相控阵雷达( MPAR)
• 采用多通道技术+数字波束形成技术( DBF)
– 具有快速的广域扫描速率、高灵敏度、更好的杂波对消、操作灵活( 多路同时波束) 等优势
超宽频带天线及多波段天线
智能天线
• 由天线阵、波束形成单元和自适应控制单元构成
移动通信基站的天线技术
– 从无源天线到有源天线系统
– 天线设计的系统化和复杂化
• 波束阵列(实现空分复用)
• 多波束以及多/高频段
多功能综合射频系统
– 通过分布式宽带多功能孔径,采用模块化、开放式、可重构的射频系统体系架构,基于功能控制与资源管理调度算法,同时 (或分时)实现雷达、电子战或通信等多种功能
第四课 发射机
发射机
– 对雷达频率源产生的小功率射频信号进行放大
• 小信号变成了大功率信号,能量从何而来?
– 能量从低频交流电或者直流电能转换而来。
• 发射机是综合技术
– 功率放大技术
– 电源和调制
– 保护和控制
– 冷却
雷达对发射机的要求
• 大功率– 峰值功率高、可用占空比大
• 高质量
– 相参发射机
– 信号相位噪声低
– 信号畸变小
• 大带宽– 工作频带范围大
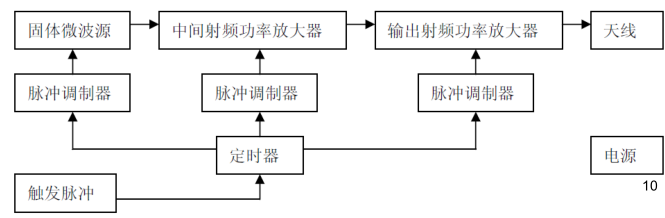
• 单级振荡式
– 同时完成大功率电磁振荡产生与调制
– 简单,廉价,高效,难以产生复杂调制,频率稳定性差
• 主振放大式
– 先产生小功率激励信号,再分多级进行放大
– 适应多种复杂调制方式
发射机技术参数
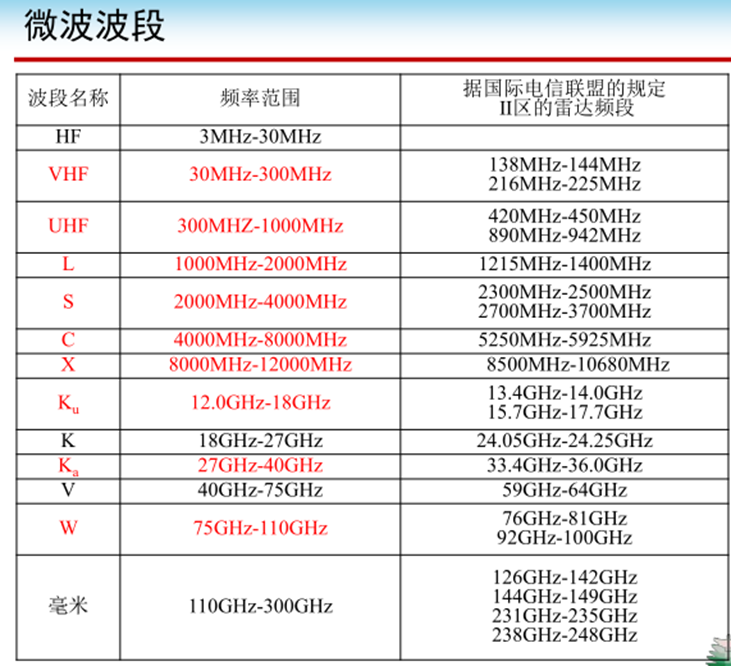
• 工作频段、带宽
– 频段的选择根据雷达所执行的任务来确定的
大气层气候条件、分辨率、雷达平台、环境、微波管水平等
– 发射机瞬时带宽:输出功率值的变化小于1dB
• 发射效率 – 发射机全机效率:发射机输出功率与供电输入功率之比
• 输出功率
– 指发射机末级放大器送至天线的射频功率。
– 对于连续波雷达,其输出功率是连续波功率;
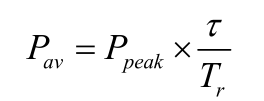
– 对于脉冲雷达,输出功率分为:峰值功率和平均功率;
平均功率是指PRT内输出功率的平均值
• 稳定性和频谱纯度
– 稳定性包括:振幅、频率、相位、脉宽、PRT
– 离散型:杂散、谐波
– 分布型:相位噪声、相位抖动
分类
1.真空管发射机(Vacuum Tub)
2.磁控管(Cavity Magnetron)
补充:是一种用来产生微波能的电真空器件。实质上是一个置于恒定磁场中的二极管。管内电子在相互垂直的恒定磁场和恒定电场的控制下,与高频电磁场发生相互作用,把从恒定电场中获得能量转变成微波能量,从而达到产生微波能的目的。同时,磁控管是一种消耗品,容易老化和消磁。
磁控管由一密封真空管组成,管内有一柱形中心阴极(电子源),置于一柱形阳极里,电子被静电场吸引流至阳极。沿真空管轴的一稳定磁场使电子偏离其径向路程,绕阴极旋转,产生微波频率的振荡。广泛用于雷达发生器
– 微波振荡器(非放大管)– 每个脉冲起始相位随机– 可通过机械调谐(5%~10%)
磁控管的缺点
– 无法精确控制频率
– 雷达脉冲脉间或者脉内的频率无法跳变
– 频率稳定度不高,不能输出宽脉冲和窄脉冲(如0.1us)
– 脉间无法相参
– 无法输出复杂波形
– 杂散功率电平高,频谱不纯净
速调管(Klystrons)
• 利用周期性调制电子注速度实现振荡或放大的微波电子管
高增益,大功率,体积大,带宽较小(≤10%)
行波管(Travelling Wave Tube)
• 依靠连续调制电子注的速度实现放大的微波电子管
• 特点
– 高峰值功率、高效率、大占空比、大带宽(100%)
固态发射机
– 由多个固态发射模块组成,应用先进的微波单片集成电路(MMIC)和优化设计的微波网络技术,将多个微波功率器件、低噪声接收器等组合成固态发射模块或固态收发模块
• 固态器件(Solid State Electronic Devices)
– 全称:固态电子器件,主要是指半导体电子元件
• 使用半导体技术实现射频信号功率放大的放大器
– 第一代半导体材料:锗(50年代)、硅(60年代后),– 第二代半导体材料:砷化镓(GaAs)
– 第三代半导体材料:SiC和GaN
如何产生多种形式的雷达波形?
– 简单脉冲– 线性调频– 相参脉冲串– 频率步进– 相位编码
信号产生器
• 直接数字合成Direct digital synthesizer
– 组成:频率控制寄存器、高速相位累加器和正余弦表.
• 直接数字波形合成 Direct digital waveform synthesizer (DDWS)
• 如何设计一个DDWS?
– 雷达信号参数:信号形式、带宽等
– 选择合适的DA芯片:DA时钟速率、DA位数
– 设计足够的波形存储器容量
– 波形存储器与DA间传输带宽足够
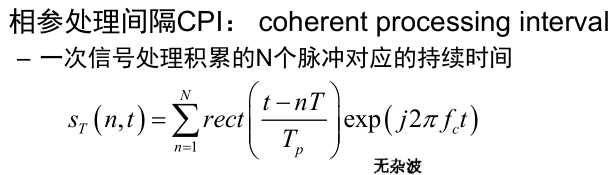
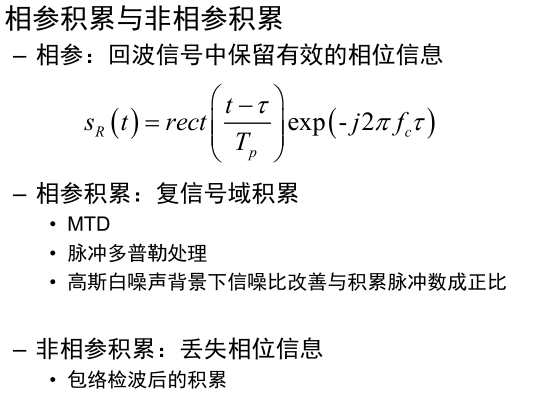
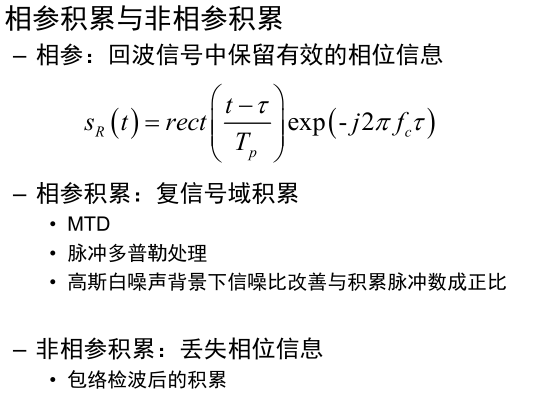
相参雷达
• 相参的概念coherent
– 两个或多个信号间存在的确定相位关系
• 相参:相位关系确定
• 非相参:相位关系随机
小结
• 发射机的作用
将频率源的小功率射频信号进行功率放大
单级振荡式、主振放大式
• 发射机的主要技术参数
工作频段、带宽、发射效率、输出功率、稳定度和频谱纯度
• 雷达发射机的类型
真空管发射机、磁控管发射机、速调管发射机、行波管发射机、固态发射机
• 信号产生器
DDWS直接数字频率波形合成
第五课 接收机
• 功能
– 接收雷达天线输出的微弱回波信号,进行放大、变频和滤波处理,输出适合于进行检波或AD采样的中频(基带)回波信号
理想的雷达接收机
• 理想的放大特性
– 在不引入噪声或信号失真的条件下放大信号
• 具有足够的动态范围
– 既能够放大大信号、又能够放大小信号
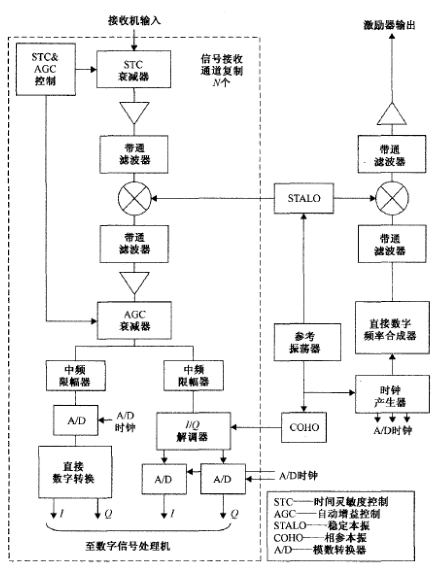
典型的接收机构成
• 滤波器• 混频器• 衰减器• 放大器• 解调器
接收机类型
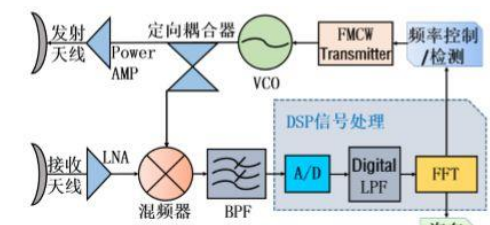
零差接收机Homodyne Receiver
• 直接变频接收机、同步接收机、零拍接收机
• 工作原理
– 将发射信号耦合出小功率信号作为接收机混频器的本振信号;
• 特点
– 发射和接收必须同时进行
– 主要用于连续波雷达的接收机
• 连续波零差接收机的应用
– 交通测速雷达 – 汽车雷达(FMCW雷达) – 近距离高分辨雷达(FMCW雷达)
• 技术优势
– 结构简单、成本低
– 能够降低信号带宽
R(t)=R0+Vt
τ(t)=2R(t)/c
SR(t)=ST(t-τ)=sin[2πfc(t-τ)]
混频:SR(t)×ST(t)=1/2(cos[2πfcτ]- sin[2πfc(2t-τ)])
输出:Sout=1/2(cos[2πfcτ]=1/2 cos[2πfc 2(R0+Vt) /c]
再进行微分运算,变换到基带
连续波零差接收机的应用
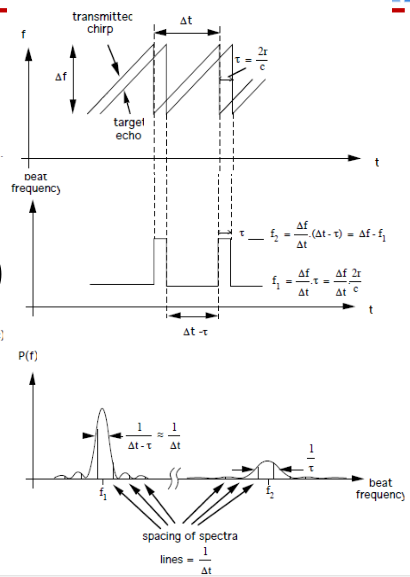
– 调频连续波雷达去斜处理
Chirp啁啾
Echo反射
求导得到频率变化2π (fc+γt)
超外差式接收机:
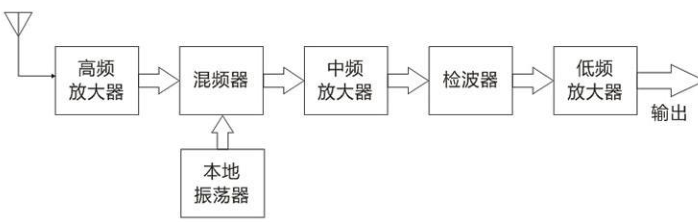
利用本地产生的振荡信号与输入信号混频,将输入信号频率变换为某个预先确定频率的接收机
超外差接收机的优点
– 提供良好的灵敏度特性、频率选择特性
– 将射频信号变频到中频,中频滤波器可以提供良好的工作特性
接收机的主要参数
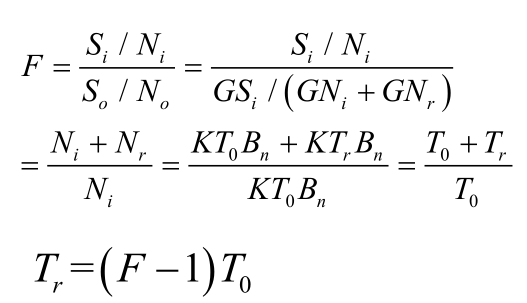
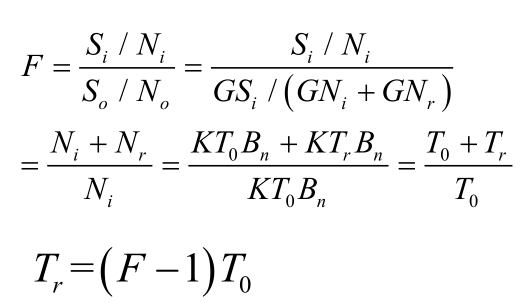
1.噪声因子
噪声因子是接收机内部噪声产生的信噪比(SNR)劣化程度的表征
– 计算方法:输入和输出信噪比的比值
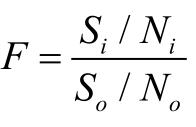
2.噪声系数
– 将噪声因子转换为dB值
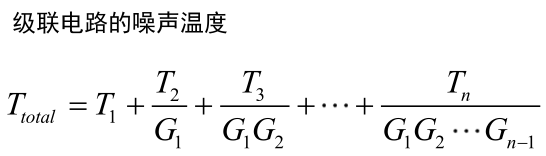
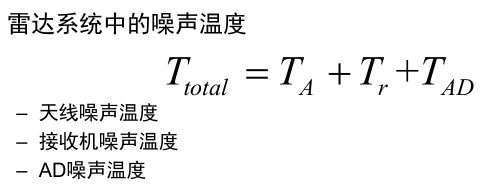
3.噪声温度:

• 如何理解第一级放大器的噪声系数决定整个接收机的噪声系数?
答:因为第一级的噪声系数占整个噪声系数的比重最大。
• 既然使用接收机会引起信噪比恶化,为什么还需要使用接收机?
答:接收机可以接收雷达天线输出的微弱回波信号,进行放大、变频和滤波处理,输出适合于进行检波或AD采样的中频(基带)回波信号
4. 接收机灵敏度与最小可检测信号
– 接收机最小可检测信号由接收机噪声决定
– 一般定义为接收机的噪声电平
雷达通过信号处理技术可以获得信噪比增益,实现负信噪比回波信号的检测
• 匹配滤波 • 信号积累
5.接收机动态范围Receiver dynamic range
• 接收机能够线性放大的的最大和最小可能接收功率之比
• 线性放大器:能够线性放大的信号功率上限是1dB压缩点
– 1dB压缩点:当放大器增益出现1dB下降时对应的输出功率
• 大功率信号进入接收机放大后使接收机进入饱和状态,引起信号失真(削峰),引起信号处理性能下降
• 接收机进入饱和状态,恢复正常工作状态需要恢复时间
• 接收器动态范围受模拟(特别是混频器和放大器)和数字(AD)组件的限制。
– 下限:雷达系统的本底噪声
– 上限:放大器或混频器中的非线性效应
6.接收机带宽
接收机带宽主要指中频带宽
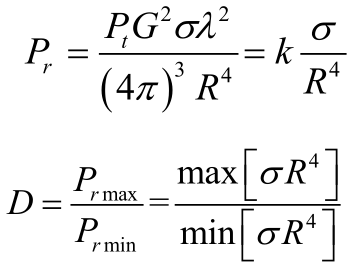
回波信号中最大信号和最小信号功率之比
– 最大信号:距离四次方的倒数与目标RCS乘积最大目标的回波信号
– 最小信号:距离四次方的倒数与目标RCS乘积最小目标的回波信号
扩展接收机动态范围
• 自动增益控制
– 根据回波信号强度自动调节接收机增益,大信号时调低增益、小信号是调高增益
– 使回波信号的功率范围处于接收机线性放大区间
• 实现方式
– 增加可变衰减器
• 程序增益控制
– 根据回波信号强度,通过程序调节接收机增益,大信号时调低增益、小信号是调高增益
– 使回波信号的功率范围处于接收机线性放大区间
• 实现方式
– 增加数控衰减器
• 时间灵敏度控制(Sensitivity time control:STC)
– 同等RCS的目标回波信号功率与距离的4次方成反比
– 按照雷达探测距离变化反向调节接收机
接收机带宽
• 瞬时带宽
– 接收机内射频、中频、视频和数字滤波组合决定的最终频带宽度
• 接收机带宽主要指中频带宽
– 理想的雷达接收机具有与辐射频谱和硬件限制相当的最窄射频瞬时带宽,以及良好的频率响应和冲击脉冲响应
• 调谐范围:部件工作性能指标不变坏的可用频带范围
– 通常采用调节本振频率和调节射频滤波器特性来完成调谐
– 雷达工作的频率范围常常被称为工作频带
接收机的主要组成
限幅器
• 保护接收机免遭损害和控制接收机中可能产生的饱和
• 工作特性
– 当输入信号幅度增长到限幅开始的电平时,其输出随着输入线性变化,当输入信号幅度达到和超过限幅电平期间,输出为常数
低噪声放大器(low noise amplifier: LNA)
• 具有低噪声系数的放大器
• 一般用作各类无线电接收机的高频或中频前置放大器,以及高灵敏度电子探测设备的放大电路
混频器(Mixer)
• 通过本振信号与输入信号的非线性处理和滤波完成频率变换
• 理想的混频器的工作相当于一个乘法器,只产生一个与两个
输入信号乘积成比例的输出,实现频谱搬移
IQ解调器(Mixer)
• 正交通道接收机、正交检波器、同步检波器或相参检波器等
• 功能
– 将中频信号解调为基带信号
数字下变频
• 通过数字信号处理完成将中频信号变换到基带
– 数字混频
– 数字滤波
– 数字抽取
• 数字下变频的优点
– I和Q 不平衡几乎消除:
– 直流电平漂移几乎消除:
– 通道不一致性减小:
– 线性度更好;
– 带宽和采样率选择更加灵活:
– 滤波器误差范围小,相位线性、抗混叠滤波性能更好:
– 器件的价格低、尺寸小、质量轻且功耗小
频率综合器
• 频率综合技术/频率合成技术(frequency synthesis)
– 由一个或者多个参考频率通过某些转换方式产生特定频率的信号
• 频率综合器的作用
– 通过频率合成方式产生本振信号
– 混频器利用本振信号完成信号的频谱搬移
• 发射:中频搬移至射频
• 接收:射频搬移至中频或基带
发展趋势
– 集成化– 程控化– 数字化– 小型化
– 高性能:频率范围宽、频率间隔细、频率转换快
石英晶体振荡器(晶振)crystal oscillator
• 类型
– 晶体振荡器(XO)
– 电压控制式晶体振荡器(VCXO)
– 温度补偿式晶体振荡(TCXO)
– 恒温控制式晶体振荡(OCXO)
典型的频率合成技术
• 第一代频率合成技术:直接频率合成
– 优点:频率切换速度快、相位噪声好、工作频段宽
• 第二代频率合成技术:锁相频率合成
– 目前最为普遍的频率合成方式
– 通过锁相环技术,结合分频器的使用,实现灵活的频率合成
• 第三代频率合成技术:直接数字频率合成Direct Digital
• 组合式频率合成技术
– DDS+PLL
综合利用各频率合成技术的优点
频综的主要技术参数
• 相位噪声
– 电子器件在各种噪声的作用下引起的系统输出信号相位随机变化
• 频率稳定度
– 频率测量值的波动程度:阿伦方差
• 频率准确度
– 频率均值与理论值的接近程度:相对频率偏差
小结
• 接收机的功能
– 接收雷达天线输出的微弱回波信号,进行放大、变频和滤波处理
– 输出适合于进行检波或AD采用的中频(基带)回波信号
• 典型的雷达接收机
– 零差接收机
– 超外差接收机
• 接收机的主要参数
–噪声因子dB、噪声系数(比值)、噪声温度
– 动态范围
– 接收机灵敏度
– 接收机带宽


• 接收机的组成
混频器、衰减器、低噪声放大器、滤波器、IQ解调器、限幅器、频率综合器
• 频率合成技术
直接频率合成
锁相频率合成
直接数字频率合成
组合频率合成
主要技术参数
相位噪声、频率稳定度、准确度
第六课 雷达方程
自由传播路径损耗
– 全向辐射天线
• 向空间中各个方向等功率密度辐射
• 球面上各位置处功率密度相同
雷达散射截面积
– 目标雷达散射截面积为一个与它有相等回波信号的金属球的投影面积(等效面积)
球体πR^2
圆柱体 2πr*h^2/λ
矩形 4πb^2*h^2/λ^2
– 雷达散射截面积与下列因素相关
• 目标的物理几何尺寸和外部特性
• 雷达信号的入射方向
• 雷达的工作频率
雷达方程推导
考虑天线增益
到达目标处发射
回到雷达天线后:

考虑天线的有效接收面积
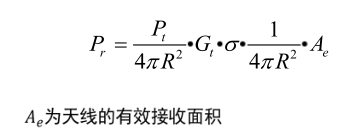
整理得:

考虑到衰减
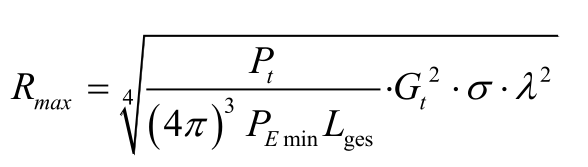
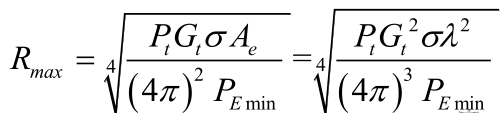
简单脉冲雷达方程;
搜索雷达方程;
tcts=Ω0Ω![]()
Rmax=4PtGtσAe (4π)2PEminLges 
Rmax=4PtσAe (4π)2PEminLges *4πΩ0
Rmax=4PtσAe 4πΩ0PEminLges 
Rmax=4PavσAe4πΩ0PEminLges* PRTtP 
Rmax=4PavσAeB4πΩ0PEminLges*tc 
Rmax=4PavσAeB4πΩ0PEminLges*tsΩ0Ω
Rmax=4PavσAeBts4πΩPEminLges
Rmax=4PavσAeBts4πΩ SNR KTsB Lges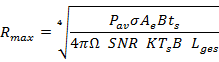
Rmax=4PavσAets4πΩKTsLS/N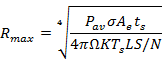
• 系统损耗的主要组成:
– 发射损耗– 大气传播衰减– 接收损耗
– 方向图损耗– 信号处理损耗
第七课 脉冲压缩技术
看做两个独立信号同时发射,回波有无重叠。即后一波束首部在Tp时间内发生了一次发射(往返),临界追上了Tp末时刻前一雷达波发射末波
脉冲雷达的局限
• 同等峰值发射功率下,脉宽越大、探测距离越远
• 脉宽越大,雷达分辨率越差
如何解决探测距离与雷达分辨率间的矛盾?
• 在不降低脉冲宽度的条件下增加信号带宽
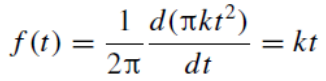
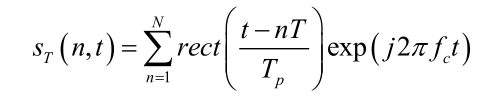
线性调频脉冲信号
• 线性调频脉冲信号
– 脉冲内部采用线性频率调制
– 瞬时频率随时间线性变化

驻定相位原理
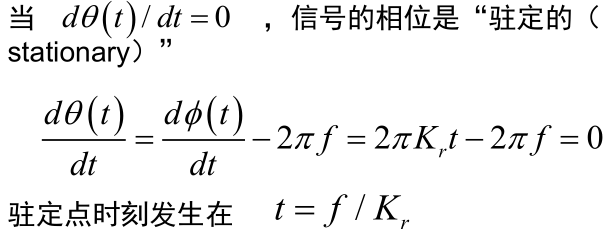
驻定点附近意味着
• 相位变化缓慢
• 积分值主要由驻定点附近的信号决定
• 远离驻定点的区域相位变化很快,对积分结果贡献很小
– 对于线性调频信号,相位谱由各频率的驻定点相位决定


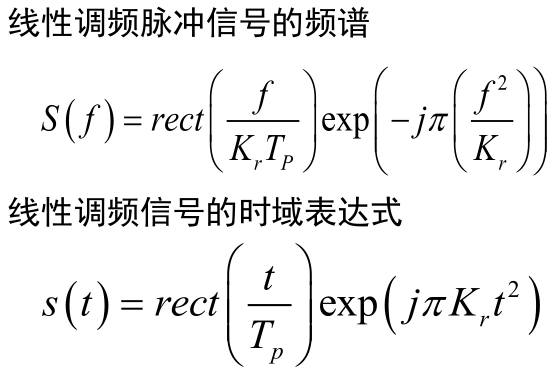
• 线性调频脉冲信号的有什么好处?
– 脉冲宽度、信号带宽可以实现独立控制
利用驻定相位原理推导线性调频脉冲信号频谱的条件?
答:1.信号的时宽、带宽积足够大。
2.保证傅里叶变换积分时间内相位有多个周期的变化
线性调频脉冲信号具有同时大时宽和大带宽的特点
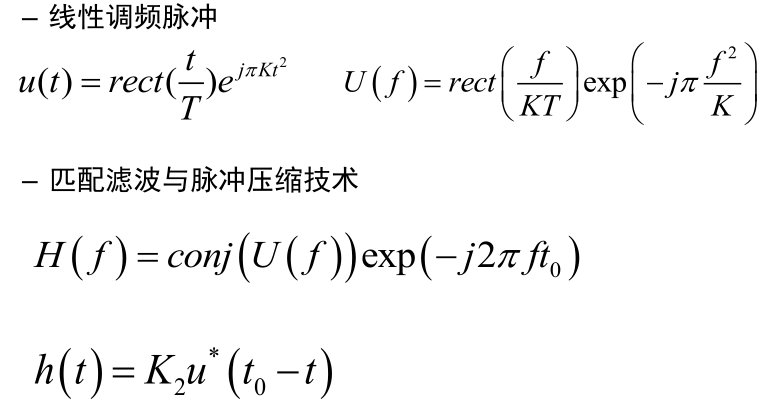
匹配滤波
– 确定信号在信道是加性噪声情况下,输出信噪比最大的滤波器
– 匹配滤波器本质是将输入信号频谱s(f)进行加权,信号越强,噪声越弱,H(f)的幅度值越大,共轭的作用是将不同频率处的不同相位转化为同相,使得抽样时刻信噪比最大
– 相关接收机
思考: 匹配滤波器为什么既能提供最大信噪比输出,又能实现高距离分辨率?
信噪比增强,且原信号带宽不变,所以实现高距离分辨率。
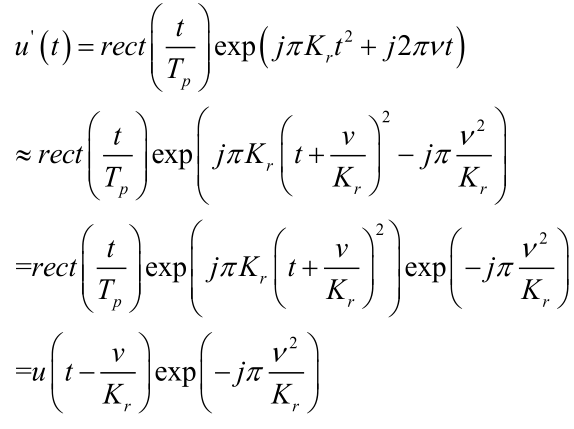
时延多普勒耦合
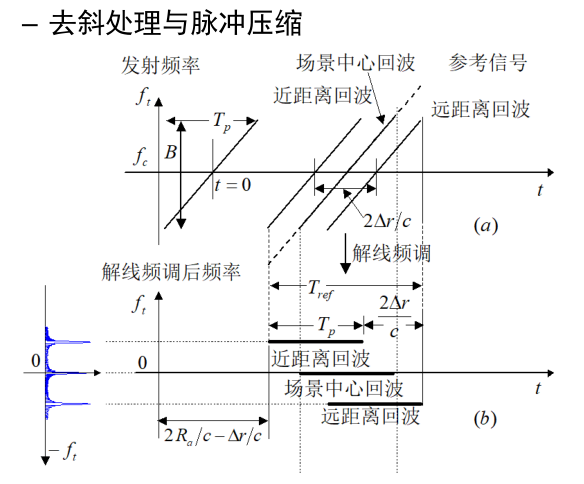
• 去斜(解斜)处理技术Dechirping
– 高分辨雷达意味着大信号带宽
– 大信号带宽需要高速AD采样
• 1GHz带宽,0.15m分辨率
• 10GHz带宽,0.015m分辨率
– 有无办法在低采样率条件下下实现距离向高分辨?
– 去斜处理是一种有效的解决方案
• 去斜(解斜)处理技术Dechirping
– 参考信号与回波作其共轭相乘,即作差频处理,回波变成单频信号,且其频率与回波和参考信号的距离差成正比
fi=-Kr2R∆C![]() ∆f=1Tp
∆f=1Tp![]() Kr=BTp
Kr=BTp![]()
所以 1Tp=-BTp2R∆C![]() R∆=C2B
R∆=C2B![]()
思考一:
线性调频脉冲该信号的去斜处理和调频连续波雷达的零差接收机处理有何区别?
线性调频信号的参考信号是专门产生的。调频连续波雷达是发射信号。
线性调频脉冲信号的脉冲浪费少,连续波雷达党的脉冲信号浪费大。
思考二:去斜处理后的回波信号带宽?
B=2Kr2R∆C![]()
• 线性调频脉冲信号的旁瓣抑制
– 线性调频脉冲信号的峰值旁瓣比水平为-13.2dB
– 高旁瓣电平将使得强目标回波信号淹没弱目标回波信号,影响检测性能下降
• 如何实现线性调频脉冲信号的旁瓣抑制?
– 幅度加权处理
• FFT的频谱泄露抑制
• 相控阵雷达天线方向图的旁瓣抑制
加权抑制旁瓣的副作用
• 分辨率恶化.
• 信噪比降低
第七课 MTI与MTD
• Fast Time 快时间 & Slow Time 慢时间
– 快时间:一个PRT内的时间轴
– 慢时间:多个PRT间的时间轴
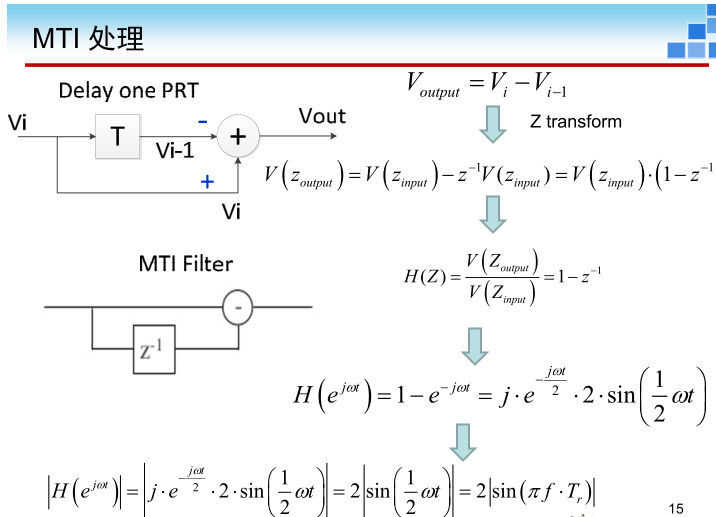
MTI 处理
• 脉冲对消处理
– 利用动目标回波信号的多普勒频移来区分动目标和固定目标
• 运动目标不同PRT的回波信号相位变化(多普勒频移引入)
• 静止目标不同PRT的回波信号相位不变
– 通过2个以上PRT回波信号的对消处理,保留运动目标回波信号,去除静止杂波信号
两脉冲对消器
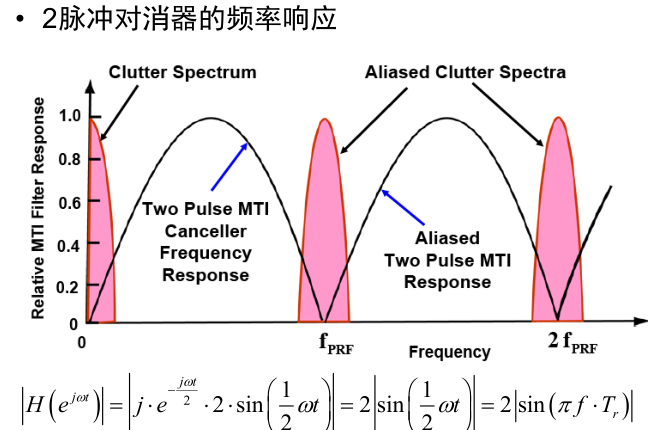
基带I/Q 2脉冲对消
补充:依靠信号处理的潜在能力再加上合理的系统配合,MTI的性能还可以进一步提高和改善:
1、增大信号处理的线性动态范围;
2、增加一组多普勒滤波器,使之更接近与最佳滤波,提高改善因子;
3、能抑制地杂波(其平均多普勒频移通常为零)且能同时抑制运动杂波(比如气象、鸟等);
4、增加一个或者多个杂波图,可以起到帮助检测切向飞行大目标的作用。
做了上述改进的系统称为动目标检测(MTD,MovingTargetDetention)系统,以区别于只有对消器的MTI(MovingTargetIndication)系统。
MTD处理
• 带通滤波器组代替脉冲对消 – 提供更灵活的动杂波抑制能力
• 多脉冲积累 – 信噪比提升
MTI或MTD处理后如何解决剩余杂波问题?
MTD+杂波图
– 首先进行MTD
– 在进行杂波图对消抑制剩余杂波
技术参数
杂波衰减
– MTI滤波器的输入杂波功率与输出杂波功率之比
– 一般条件下杂波衰减可以达到20dB以上
信杂比:SCR(Signal to Clutter Ratio)
– MTD每个多普勒滤波器组的输入或输出信杂比
改善因子
– 多普勒滤波器组输出信杂比与输入信杂比的比值
– 每个滤波器具有有不同的信杂比改善因子
杂波中可见度SCV
– 在给定的检测概率和虚警概率下,最小可检测目标回波功率与杂波功率之比
– 衡量雷达能检测叠加在杂波信号上的动目标能力的度量
– 举例
• 杂波中可见度为20dB的雷达可从比目标回波信号强100 倍的杂波中检测出飞行的目标
杂波谱:
– 高度线杂波: 由雷达平台正下方接近垂直入射的地面所产生的杂波
– 副瓣杂波:主瓣区以外的杂波信号
– 主瓣杂波:波束主瓣内非目标的杂波信号
机载脉冲多普勒雷达Vs MTD雷达
– FFT代替带通滤波器组进行动目标检测和杂波抑制
• FFT处理的滤波特性
– 满足采样定理条件下,一个离散信号经过FFT处理后,输出为该信号的频谱
– 每条谱线等效为一个窄带滤波器的输出,即FFT可等效为一组窄带滤波器
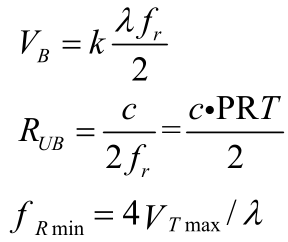
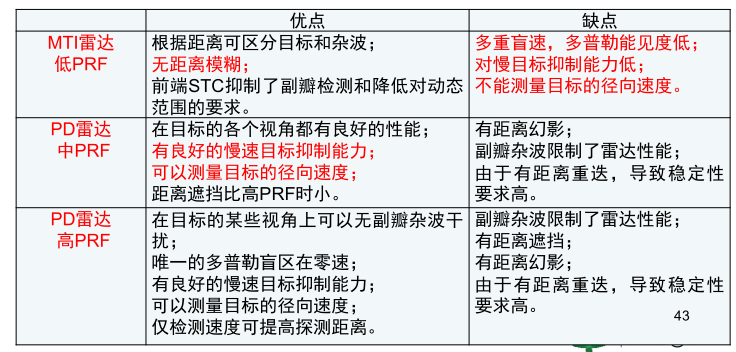
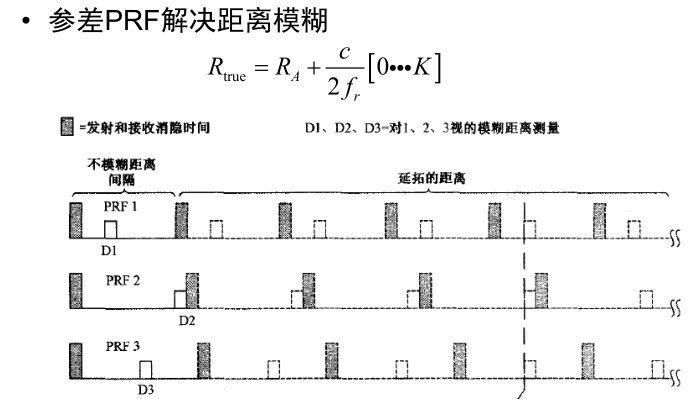
脉冲重复频率:低、中、高重频脉冲雷达
• 低重频:感兴趣的探测距离不模糊而径向速度(多普勒频率)通常
高度模糊的雷达
• 高重频:在感兴趣径向速度范围内不模糊多普勒测量,但通常在
距离上高度模糊
• 中重频:距离及多普勒上都是模糊的
MTI与脉冲多普勒处理的比较
– MTI雷达:低重频
– PD雷达:中、高重频
机载脉冲多普勒雷达
• 杂波抑制:多普勒处理
• 雷达检测:CFAR恒虚警算法
PRF脉冲重复频率
• 恒虚警检测
– 雷达系统通常要求能够在比热噪声更为复杂和不确知的
背景环境中检测目标测存在并保持给定的虚警概率
• 自适应门限检测
– 采用自适应门限检测电路.在没有目标存在时,利用自动检测电路来估计接收机的输出,以保持一个恒虚警率的系统称为恒虚警系统(CFAR)
若杂波干扰的概率密度分布已知,只需估计某些未知参量的情况,属于参量型处理方法.
– (a) 噪声电平恒定恒虚警检测:
• 这是一种对接收机内部噪声电平进行恒虚警处理的电路.内部噪声
由于温度,电源等因素而改变,它的变化是缓慢的,因此这种处理是慢门限恒虚警处理
单元平均恒虚警检测(cell averaging CFAR)
• 被检测距离单元附近选择一定范围的距离单元通过平均方法计算检测门限.
恒虚警检测有无副作用?
– 恒虚警检测损失,强杂波区域会自动提高检测门限,雷达最小可检测信号性能变差(灵敏度恶化)
解决办法:提高信噪比
小结
• MTI处理
– 2脉冲对消器
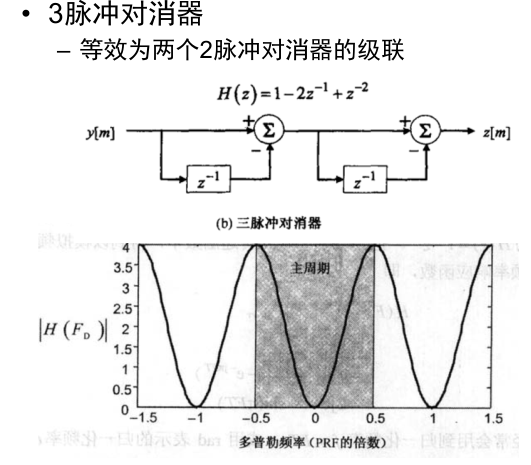
– 3脉冲对消器
– 盲速
(目标速度使回波信号在脉冲间的相移刚好为360° 或其整倍数,相位检波器的输出没有变化– 系统盲速的多普勒频率出现在PRF的整数倍上)
• MTD处理
– 带通滤波器组:更好的动杂波抑制能力
• 脉冲多普勒处理
– 使用FFT代替滤波器组,实现更好的杂波抑制能力和速度分辨能力
第九课.相控阵雷达
相控阵天线
合成天线阵列
– 使用一个小口径天线,通过空间移动的方式在空间不同位置分别发射和接收信号,通过分时方式形成天线阵列下列两式为双程,之前为单程
角度分辨率由天线波束宽度决定
• 横向分辨率
– 信号传播的切向分辨率
– 与角度分辨率和距离的乘积成正比,远距离的横向分辨率恶化
• 合成天线阵列
– 使用一个小口径天线,通过空间移动的方式在空间不同位置分别发射和接收信号,通过分时方式形成天线阵列
合成孔径雷达的关键特性
– 空间二维高分辨:距离、方位
– 实现方式
• 距离向高分辨:宽带雷达信号
• 方位向高分辨:相参雷达,运动平台合成孔径
– 运动平台的合成孔径处理是合成孔径雷达的核心
• 合成孔径雷达的几何关系
– 迎坡缩短 迭掩 阴影
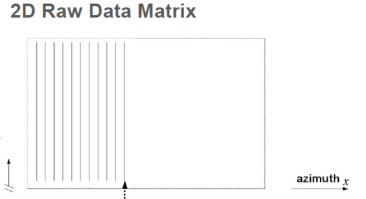
• 合成孔径雷达的数据录取
– 距离、方位二维回波数据
• 合成孔径雷达回波信号模型
– “走-停-走”假设
• 信号在发射和接收过程中近似认为雷达静止.
• 完成一次发射和接收后雷达移动至下一位置
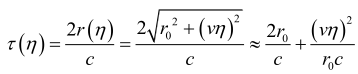
为什么假设成立?
答:假设存在近似误差。τ=2R/C,卫星运动L=Vτ,卫星运动速度7~8km/s
轨道高度:150km以上,取900km,τ=6ms,L=42m~48m
机载火控雷达走停走假设不成立,雷达与目标存在径向速度
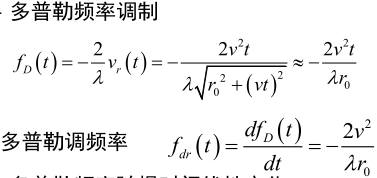
SAR回波信号模型
– 距离徙动
– 雷达相对于目标的运动导致目标与雷达间的距离变化
思考脉冲多普勒雷达有无距离徙动问题?
答:有距离徙动问题。常规脉冲多普勒雷达多采用窄带信号,距离分辨率低,不太考虑这个问题。
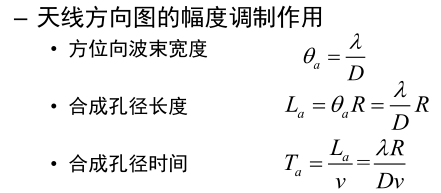
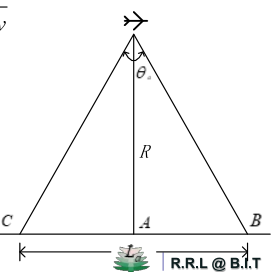
在Ta这段时间内可以接受到有效信号。近距离时间短,合成孔径长度短,远距离时间长,合成孔径长度大。
角度分辨率θ=λ/2La=D/2R
横向分辨率△δ=θ*R=D/2 (2由合成孔径雷达发射接收特性决定)
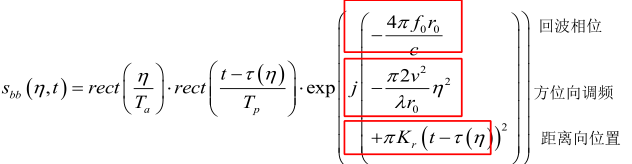
合成孔径雷达回波信号模型
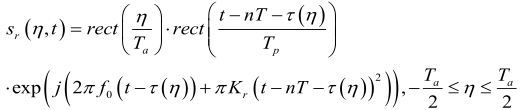
![]()
射频信号变换到基带

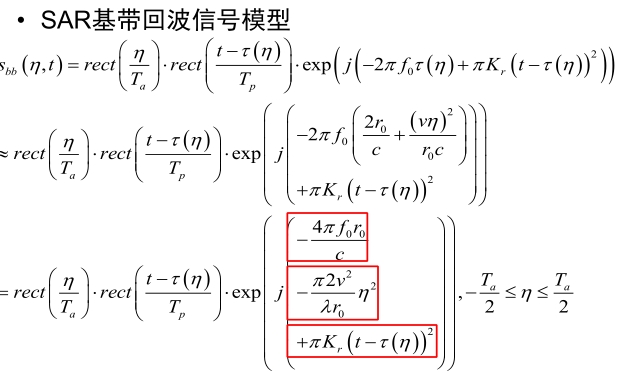
• 回波信号模型
– 距离向:线性调频脉冲信号
– 方位向:线性调频信号
– 距离徙动
• 方位向平移不变性
• 距离向空变性
合成孔径雷达的成像算法
Step 1: 距离压缩
Step 2: 方位向FFT
Step 3: 距离徙动校正
Step 4: 方位压缩
聚焦深度
– 方位向调频率随距离变化
– 方位向的参考函数需要随距离变化
– 在一定距离范围内可以使用相同的方位向参考函数进行方位向处理
思考
– 前斜模式SAR与正侧模式SAR的主要差异?
答:正侧模式 多普勒频率为0 回波信号距离徙动为抛物线形状
前斜式 多普勒中心频率不为0 回波信号距离徙动为抛物线一部分
运动误差补偿
– 运动参数测量与天线稳定技术
– 天线稳定平台
多普勒参数估计(功率谱能量平衡法、图移法)
• 多普勒参数估计是指从雷达回波本身去提取多普勒参数的各种方法。
• 其目的是获得以下两个参数的估计值:
fDC是多普勒中心频率
fr是多普勒调频率
合成孔径雷达的成像模式
条带模式 聚束模式 扫描SAR模式 逆合成孔径模式
高级模式:
干涉SAR模式 圆迹SAR模式 视频SAR
思考
SAR通过运动平台和合成孔径处理实现了高分辨率微波成像,除了成像功能外,SAR是否可以提供其他信息吗?
答: 干涉合成孔径雷达可以获得高度维信息进行3D建模,差分干涉合成孔径雷达可以检测地表形变
常规SAR为单通道方式工作(一个发射通道加一个接收通道),如果可以扩展通道,是否能提供其他观测能力?
答:是,顺轨合成孔径干涉实现运动目标的测量
干涉合成孔径雷达;– 交叉轨道干涉 顺轨干涉 差分干涉 层析SAR
小结
• 合成孔径雷达的成像原理
– 距离向高分辨:宽带信号
– 方位向高分辨:合成孔径
• 典型的合成孔径雷达成像模式
– 条带、聚束、扫描
• 合成孔径雷达的信号模型
• 距离多普勒成像算法
– 距离压缩 – 距离徙动校正 – 方位压缩
• 合成孔径雷达的运动补偿
• 合成孔径雷达的高级模式
-----------------------------------------------------------
图源转侵删
本人整理仅作为学习交流使用
最后
以上就是尊敬香水最近收集整理的关于雷达系统与原理期末个人总结的全部内容,更多相关雷达系统与原理期末个人总结内容请搜索靠谱客的其他文章。








发表评论 取消回复