雷达系统的时间尺度(快时间、慢时间)
一类是单个脉冲的处理,另一类则是对多个脉冲的处理。
在对单个脉冲进行处理的时候,对应的时间尺度往往都极短。因此在进行雷达信号处理的时候,我们通常定义单个脉冲对应的时间尺度为快时间。在快时间上,会进行脉冲压缩和匹配滤波等操作。
对于多个脉冲的处理,考虑到脉冲的重复间隔PRI,对比单个脉冲的采样时间,此时的采样较慢,因此通常定义对多个脉冲的操作和处理是在慢时间维进行的。慢时间上的处理一般包括多普勒处理,以及一些空时自适应处理,成像等等。
雷达接收到的信号特性
这些特性主要有:功率,频率,极化,到达角,信号随时间的变化,随机性等。这些现象即与发射回波的特性决定,也和雷达自身的特性决定,如发射波形,极化,天线增益等。
雷达的高分辨成像
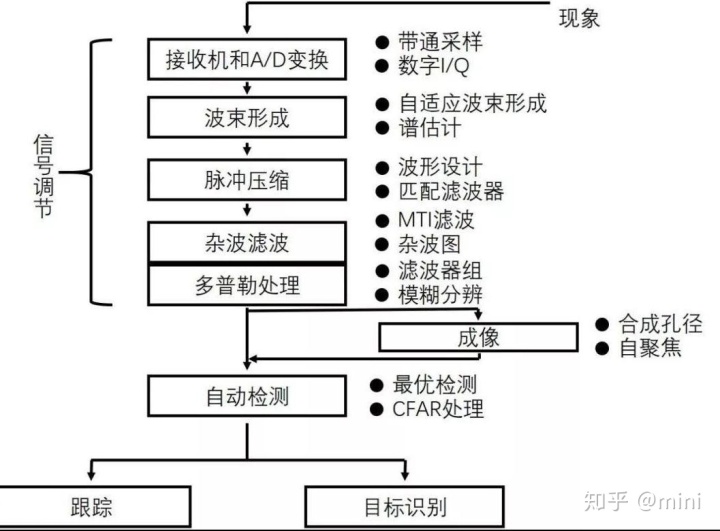
为了得到高分辨的成像,雷达采用两种方法,一种大带宽的波形,可以获得距离维得高分辨率。另一种是采用合成孔径雷达技术,可以获得垂直距离维的高分辨率。
雷达信号处理的目的
首先,通过信号调节提高了数据的SIR,便于后续的参数估计,检测成像等处理。通常包括一些波束形成,脉冲压缩,杂波滤除和一些多普勒处理等。
雷达信号处理的目的是希望判知回波中是否有我们感兴趣的目标,这个时间就需要到检测,大多数情况下,采用门限检测的方法可以获得最佳的检测性能。此时的信号已经经过了前面一系列的信号调节和干扰抑制等处理,通过将信号的幅度和门限进行比较,判断该回波中是否存在目标。
当然这种处理方法也存在着一定的错误概率,有可能出现的干扰强过我们认为的目标信号,导致检测到虚假目标,雷达信号处理中将其定义为“虚警”,在实际中,我们往往是通过估计接收回波数据本身的统计特性进行门限计算,这一过程即为“恒虚警率CFAR”检测。
其他处理
在进行检测处理后,即为数据处理的部分,一般在经过检测处理,我们可以得到目标信号,然后根据得到的目标信号,可以估计出其相应的参数,比如距离,速度,角度等等。给出目标的这些参数,主要用于后面的数据处理,数据处理中一般主要实现跟踪轨迹等功能。
最后
以上就是文静绿草最近收集整理的关于matlab 雷达信号分选 聚类_【Matlab学习】雷达信号处理的全部内容,更多相关matlab内容请搜索靠谱客的其他文章。








发表评论 取消回复