TwinCAT3Bode图是分析和优化机械系统内机械共振的理想工具。
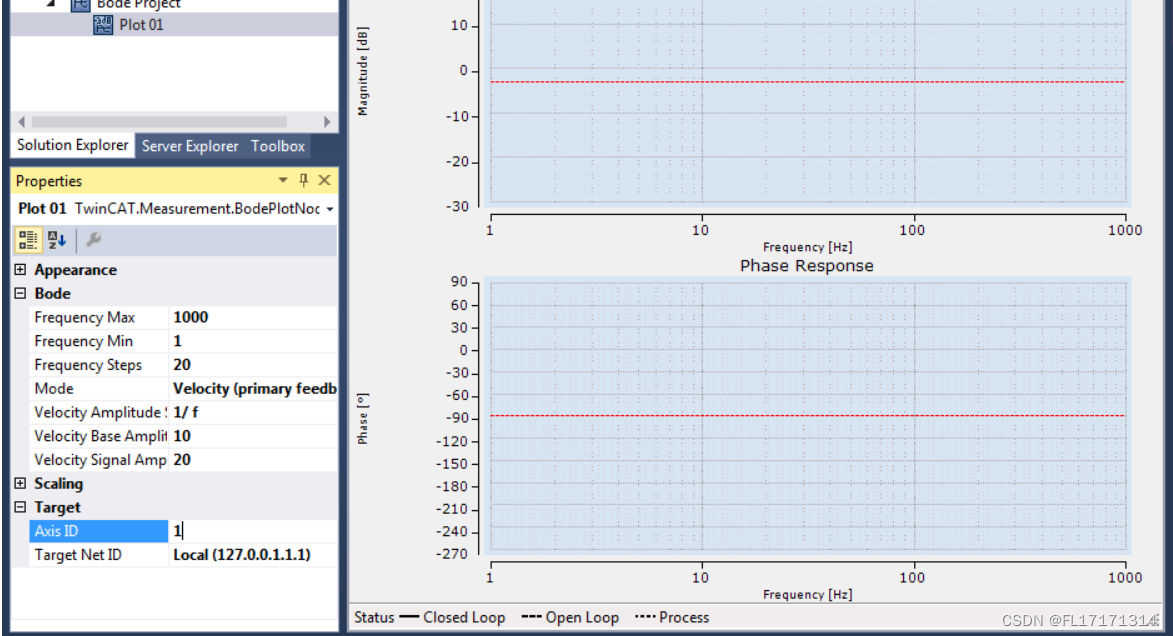
一、在“属性”窗口中,为波特图所在的驱动轴设置“Axis ID”和“Target Net ID” 被创建。
(NC。NC 轴如果关联到物理轴,就是实轴。在 TwinCAT NC 中,NC 轴一定要关联到物理轴,才 能控制电机动作。所以一个电机对应一个实轴。 如果不关联到任何硬件,就是虚轴)
二、在执行实际的波特图之前,必须只调整一次 TwinCAT 项目的设置。
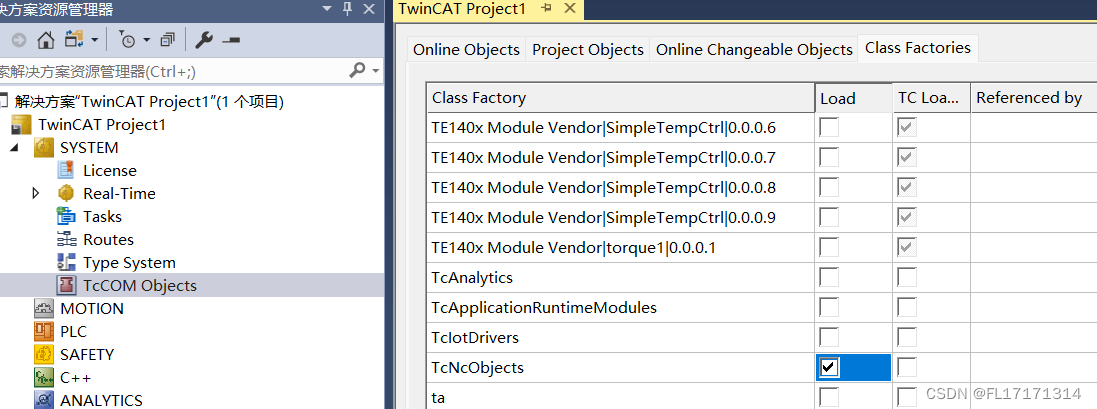
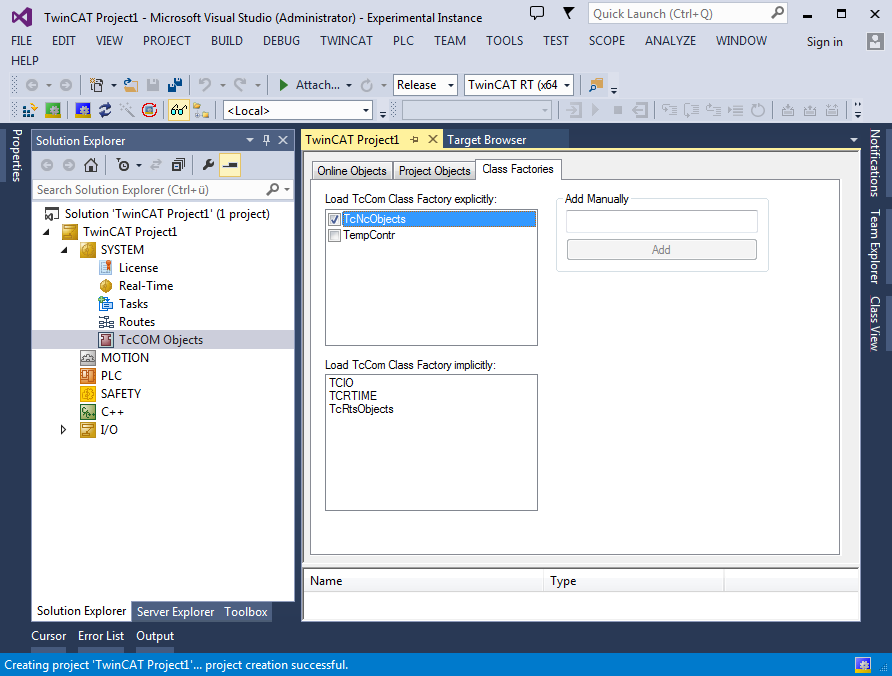
宣布 TcNcObjects 类对象:波特图由 TwinCAT 中的 TcCom 对象执行 系统。为确保这可以从 Bode 项目自动生成,必须宣布 TcNcObjects 的类对象。
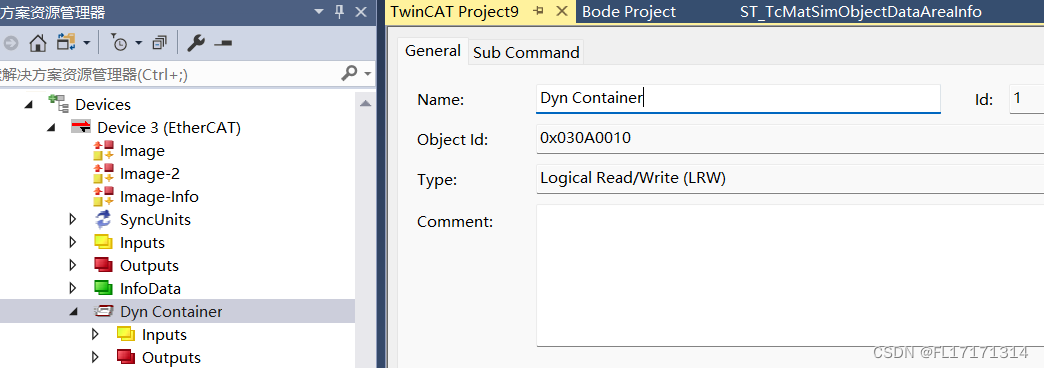
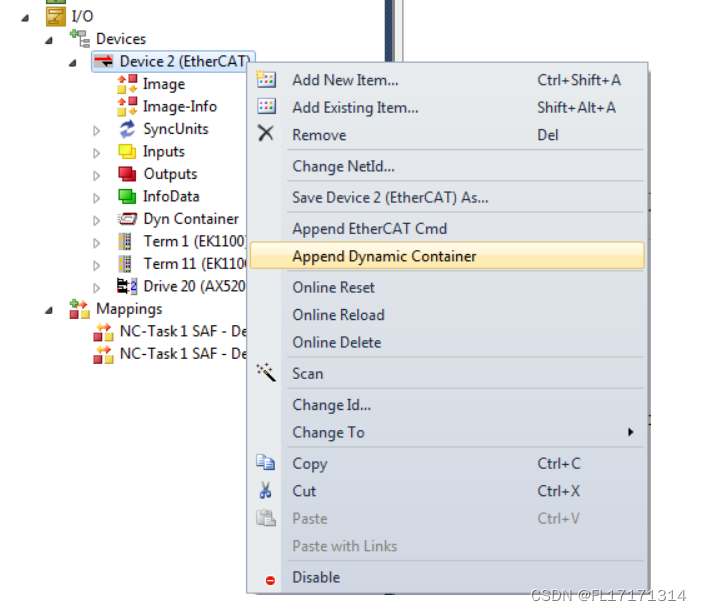
三、将动态容器(Dyn Container)附加到 EtherCAT 主站:为了与驱动器进行动态通信,保留一个 每个 EtherCAT 设备仅存储一次。确认后续查询容器的对话框 大小与确定。
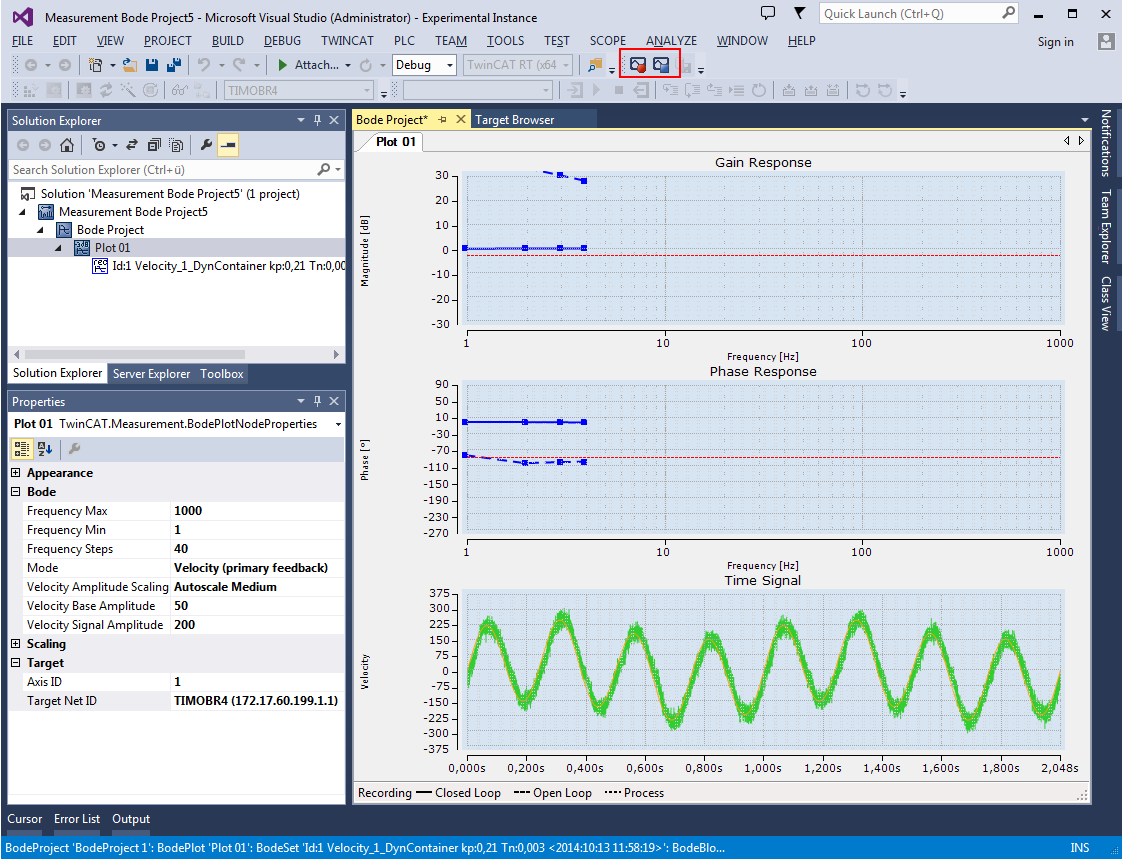
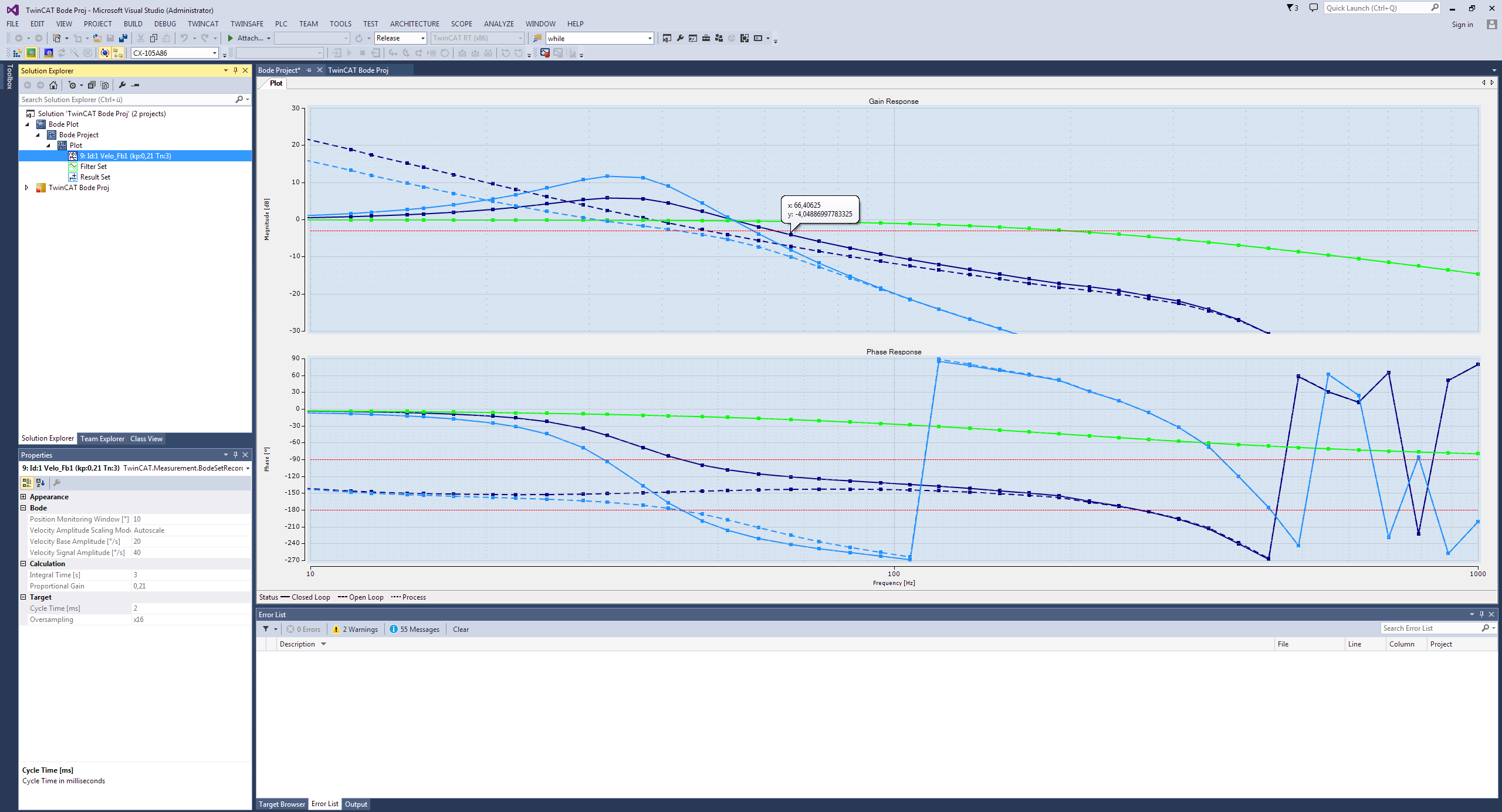
四、波特图记录 选择目标系统和驱动轴后,可以参数化绘图中的记录 特性。绘图设置的详细信息可以在“波特图 - 绘图属性”。 波特图从测量工具栏中的“开始记录”按钮开始。
例子:
————————————————————————————————————
报错信息:


Bode 记录开始,没有任何反应。可能是什么原因? !!可能的原因可能是:
•轴未释放。
•存在驱动器错误。(这可以在 TC_Drive_Manager 中读取)。
•安全已取消发布。
•滞后错误监控处于活动状态。
哪些测量范围有用?
!速度模式下为 5 - 500 Hz,电流模式下为 50 - 3000 Hz。
? NC 循环时间对波特表示是否有影响?
!测量值在所谓的动态容器中传输。此外,过采样 方法确保测量值的精确再现。
————————————————————————————————————
最高响应频率即给定最高频率的正弦速度指令,系统输出速度波形的相位滞后不超过90°或者幅值不小于71%(-3dB)。
波德图原理
波德图是复杂传递函数或频率范围内系统的一种特殊表示。波德图由一个值图(振幅响应)和一个相移图(相位响应)组成。它描述了系统对谐波激励的平稳反应(窦振荡)。频率以对数形式显示在x轴上。因此,在较宽的频率范围内的行为一目了然。
在伺服系统中,借助伯德图分析可以分析闭环和开环控制以及传动环节(如连接机构)的行为,并制作或优化控制器和滤波器的设置。一般来说,这可以发生在典型的操作模式中——电流、速度和位置控制——也可以作为自动调整算法的基础。目前有两个变种在TwinCAT -电流和速度控制。
传统的方法,如优化到阶跃响应,只能在有限的程度上可用。波德图包含了比阶跃响应更多的信息,因此是分析和优化控制回路的理想工具。
系统在整个频率范围内的性能和稳定性是直接可见的(在休息位置的精度-在较低的频率范围;动态反应-在中频范围内;噪音抑制-在高频范围内)
带宽可以更简单、更精确地指定,而不会受到噪声影响的干扰
问题频率(机械共振点)分析起来更简单
过滤器可以相应地确定和调整
什么会在传动系统中产生共振?
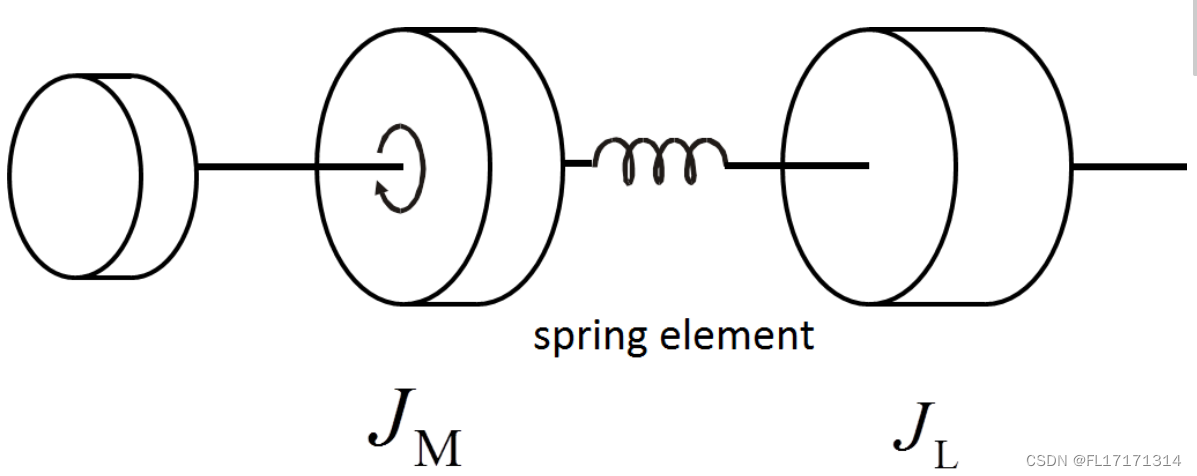
负载和电机之间的每一个联轴器都具有有限的刚度。这就导致了整个系统的惯性比和共振频率不同。如果没有合适的工具,这些不同的频率很难确定。为了可靠地检测所有共振点,频率分析可以用几乎无限精细的分级进行。
测量过程中必须消除机械摩擦,否则测量将无效。因此,为了克服静摩擦,在电机轴上附加了一个恒定低频的正弦振荡。正弦频率,逐步增加,以这种方式调制。为了确保电机电流在速度(和位置)控制中保持或多或少的恒定,正弦振荡的振幅随着频率的增加而减小。因此,在高频率下,驱动振幅非常小。波德图中的电流是恒定的。
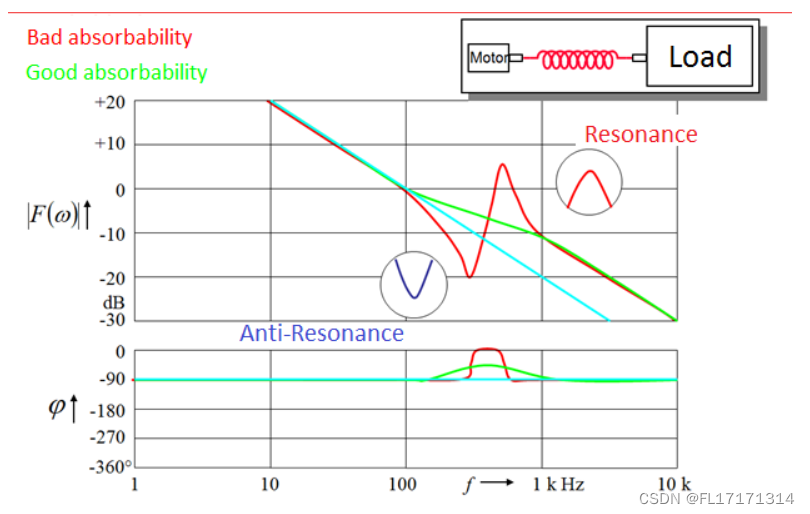
波德图
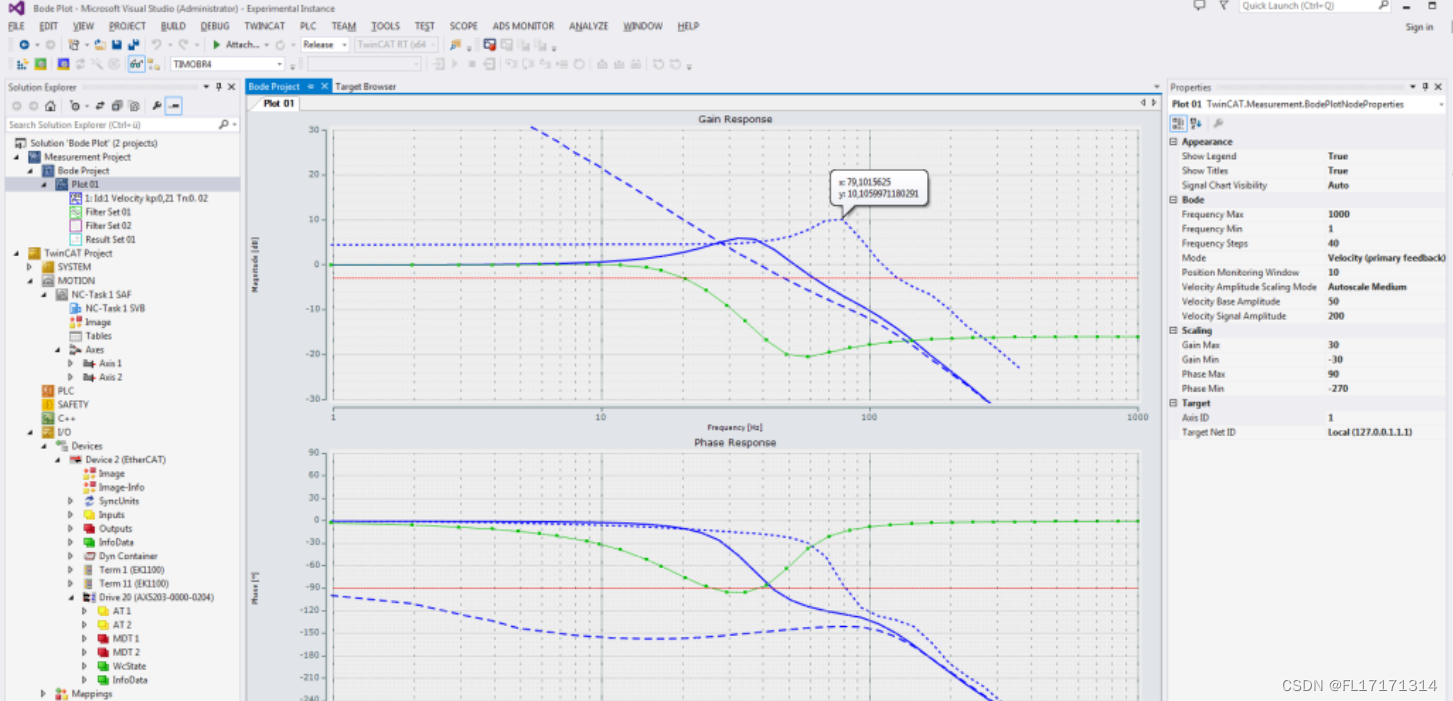
共振点用波德图表示。在表述中,一个共振点由一个反共振(频率响应显示一个明显的最小值)和一个共振(频率响应显示一个明显的最大值)组成。
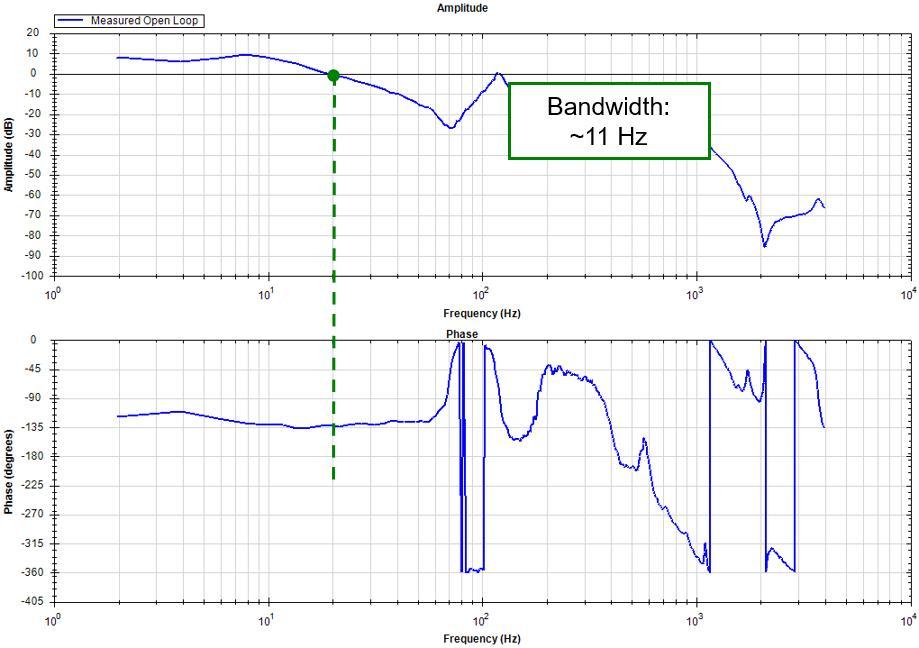
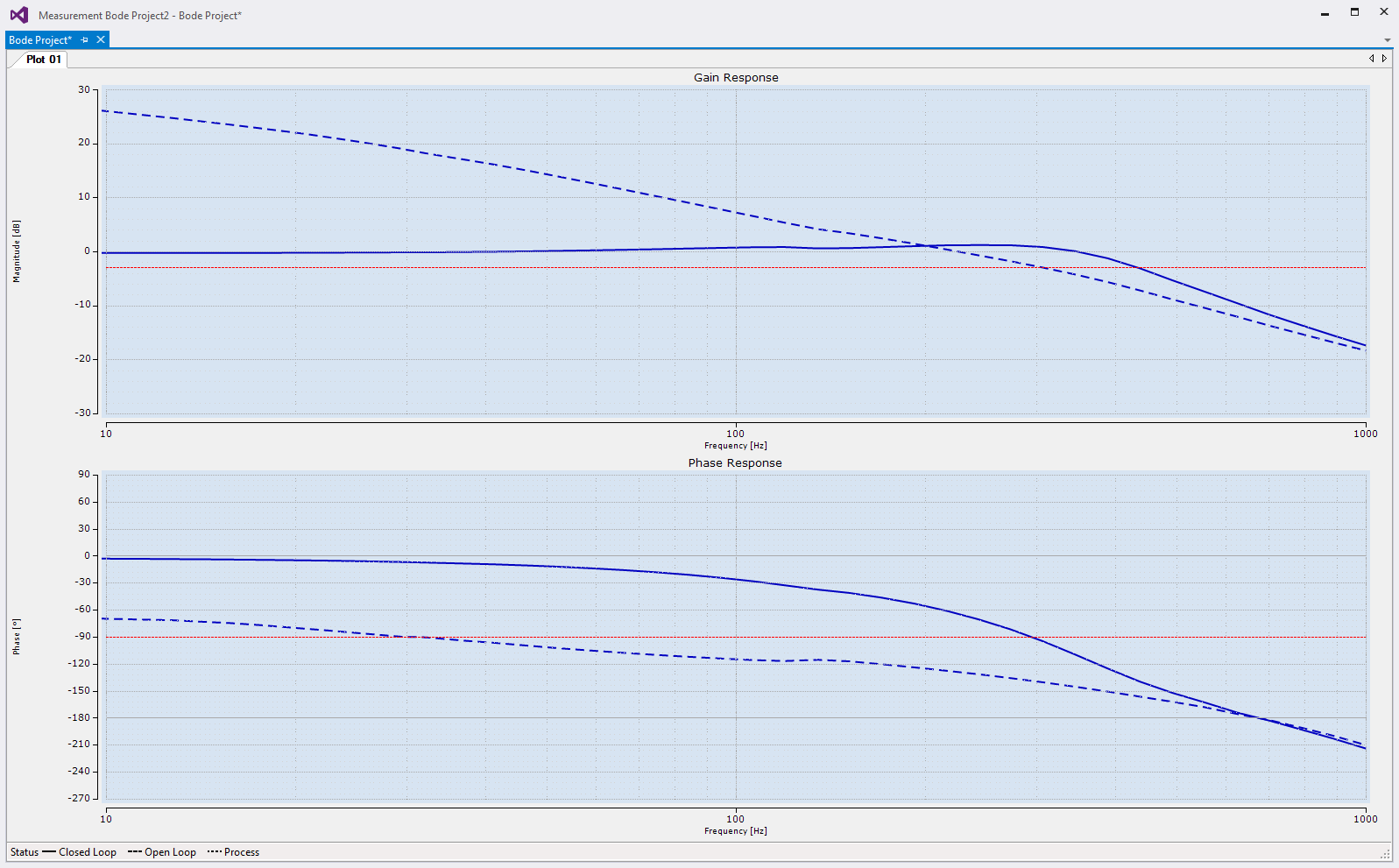
下面的插图显示了一个电机的频率响应的例子,没有负载,没有共振点和相当宽的带宽。闭环控制回路用于确定带宽,开环控制回路用于计算幅值响应。在振幅响应第一次穿过-3 dB或-90°线的地方读取带宽。系统的带宽越高,系统的稳定性越好,控制环路增益也可以设置得越高。这导致了高动态。
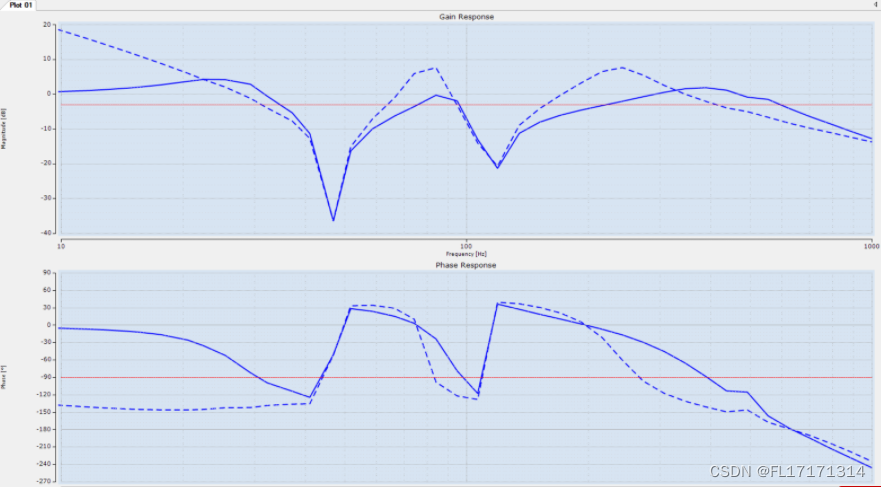
下一个图显示了一个典型的有谐振点的曲线:一个有两个谐振点和窄带宽的曲线。
第二个重要的极限是+ 3db线。如果闭环控制回路的幅值响应超过这个限制,这被称为正反馈,类似于音频(麦克风靠近扬声器的扬声器)。
这种正反馈产生了一种不希望的机械振荡,这可能导致不受控制的行为。
通过增加P部分(比例增益),曲线平行于横坐标向上平移;而减少则会产生相反的效果。
波德图-结构
TwinCAT波德图不仅显示了信号曲线,还创建了记录配置。为了创建这些配置,熟悉Bode Plot的体系结构是很重要的。体系结构反映在解决方案资源管理器中的度量项目中的树状结构中。
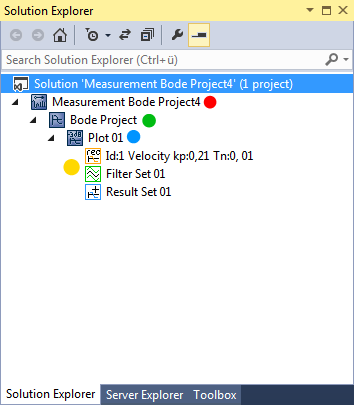
每个波德图表示与驱动轴的连接。一个波德项目可以有多个地块。
图的显示区域包含一个振幅和相位响应的图表,其中显示了相关轴已经记录或生成的集合(特征曲线)。当一个记录运行时,第三个图表也可以有选择地显示当前的实际值和设定点值。
除了驱动轴的连接数据,下一次记录的参数也通过波德图设置。
——————————————————————
每一组对应一个记录或生成的频率响应,并代表了振幅和相位除以频率的结果特征曲线。图形可以显示为开放和封闭的控制回路,以及链接。
区分三种类型的集合:
记录集表示实际记录的值
滤波器集表示滤波器的特性曲线
结果集按顺序表示两个集合的组合,例如,以了解滤波器如何影响频率响应。
除此之外,外观,例如颜色和线宽,可以在属性窗口中调整。
——————————————————————
控制Bode Plot的界面被划分为几个单独的窗口(工具窗口),它们的位置和大小可以自由配置。
扩展
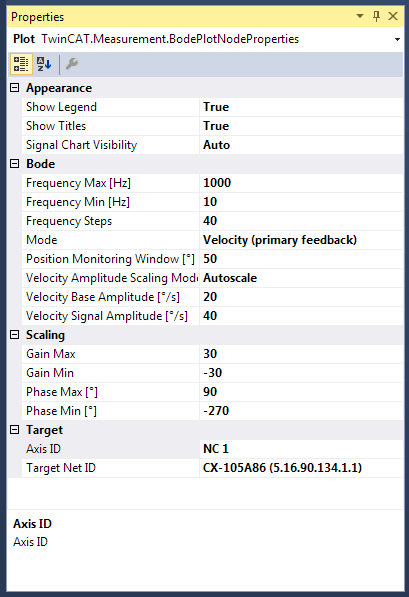
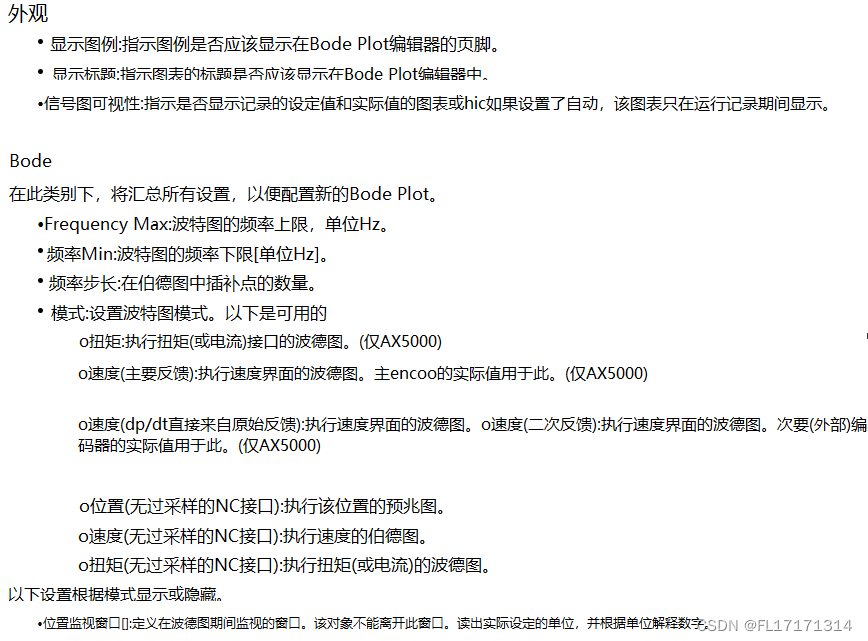
增益最大值:表示幅值响应图中值轴的上幅值。
增益最小值:幅值响应图中值轴的下幅值。
最大相位:表示相位响应图中最高的刻度。
相位最小:表示相位响应图中最小的刻度端。
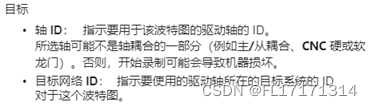
目标
“Axis ID”:表示要用于该伯德图的驱动轴的ID。所选轴可能不是轴联轴器的一部分(例如主/从联轴器,数控硬或软龙门)。否则,开机录音可能会造成人员和机器的损坏。
“Target Net ID”:表示驱动器轴所在的目标系统的ID,该目标系统将用于这个波德图。
基本频率:显示克服静摩擦的基本振荡的频率[以赫兹为单位](仅在速度模式中)。
波德对象Id:如果波德图是通过“Drive Diag TcCom Object 驱动器Diag TcCom对象”发生,已经设置在系统管理器(例如,为了从驱动器的范围额外的进程数据),这可以在这里通过对象Id发生。
检查驱动器限制:如果要对驱动器进行检查,可以在这里指定。
DynContainerId:为动态进程数据设置容器的ID。在TwinCAT项目中,DynContainer被附加到EtherCAT设备。
测量样本计数:用于计算波德特征曲线(频率点)插补值的设定值和实际值的个数。
“测量时间”:系统以一个频率被激活的时间长度,单位为s。
信号发生器:表示所用信号发生器的曲线类型。
系统死亡时间:完整的死亡时间可以在这里输入,以秒为单位。
Trace Level:设置由“Drive Diag -TcCom Object”产生并显示在错误列表中的消息的详细级别。可用选项为“始终”、“错误”、“详细”和“警告”。
用户死亡时间:可以在这里指定以秒为单位的死亡时间。
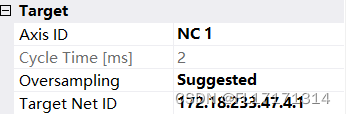
目标
Cycle Time:最近一次使用的周期时间,单位为ms。
Oversampling:使用过采样系数。如果设置为“建议”,在开始录音时自动选择最高的有用系数。
在Properties窗口中,设置要创建Bode Plot的驱动轴的“Axis ID”和“Target Net ID”。
准备TwinCAT项目:
在您可以执行实际的Bode Plot之前,您必须只调整一次TwinCAT项目的设置。
宣布TcNcObjects类工厂:Bode Plot是由TwinCAT系统中的TcCom对象执行的。为了确保这可以从Bode项目中自动生成,您必须为TcNcObjects宣布类工厂。
向EtherCAT主机添加动态容器dynamic containers:对于与驱动器的动态通信,每个EtherCAT设备只保留一次内存范围。使用OK确认后续查询容器大小的对话框。
制作一个波德图记录
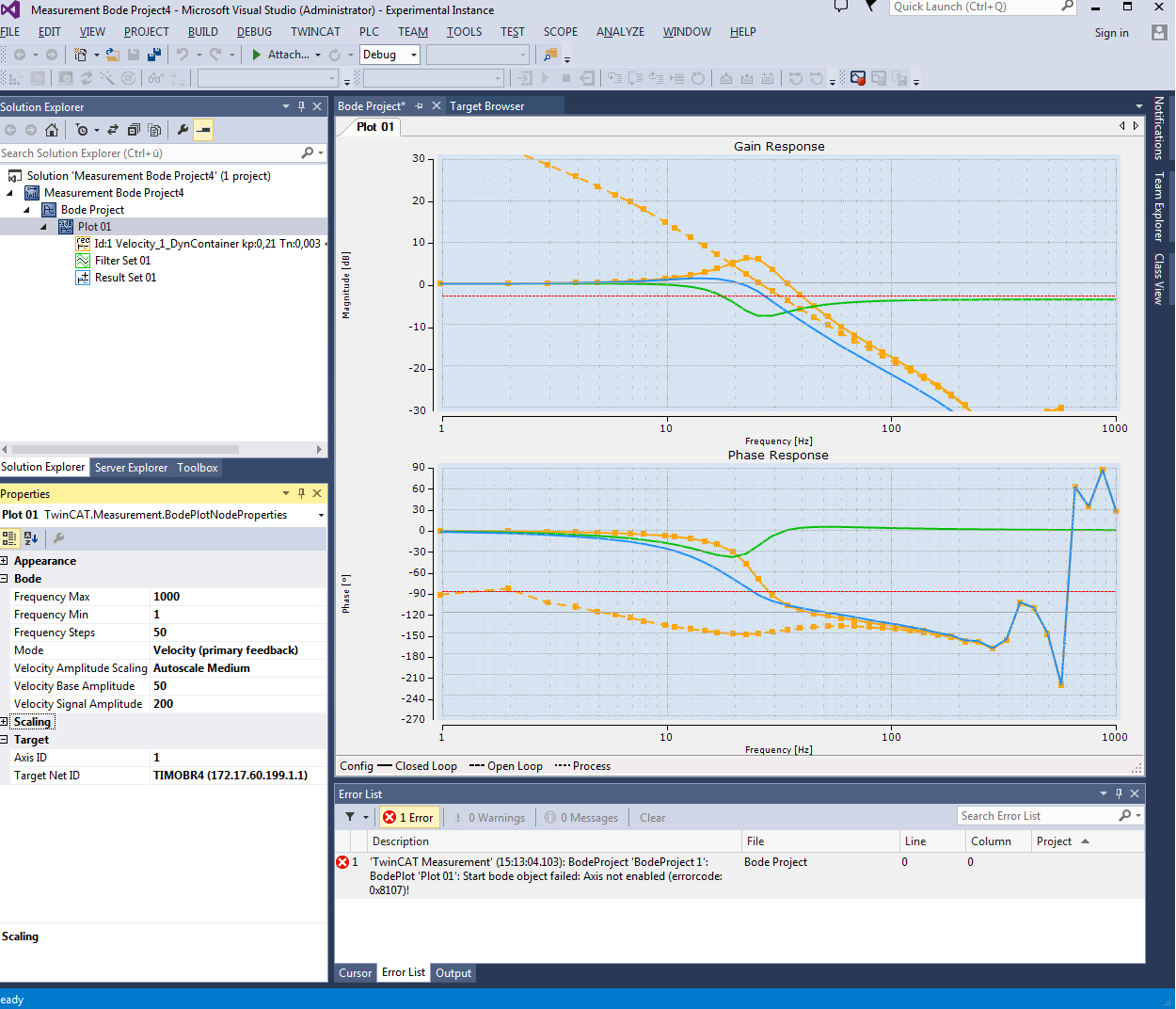
在选择了目标系统和驱动轴之后,您可以在Plot属性中参数化记录。有关情节设置的详细信息可以在“波德情节-情节属性”一节中找到。通过Measurement工具栏中的“Start Record”按钮,开始Bode Plot。在记录期间,当前时间信号显示在下面的情节。您可以在任何时候中止录制与停止按钮。
6. 错误
如果在录制过程中发生错误,它们将显示在Visual Studio错误列表中。例如,当试图开始记录时,Bode Plot发出丢失轴释放的信号。

但是,错误列表只显示作为活动解决方案一部分的项目的错误输出。
示例:如果驱动轴发出延迟错误信号,并且项目不是主动解决方案的一部分,则输出一般的Bode Plot错误。
如果项目是活动解决方案的一部分,那么延迟错误也会输出到错误列表中。
7. 分析
跟随记录,您可以看到迄今为止创建的所有特征曲线。您可以更改属性中的显示选项。例如,查看“路径”以及“开环控制”和“闭环控制”,或突出或遮罩个别特征曲线可能是有用的。有关设置的详细信息可以在“波德图-设置属性”一节中找到。
除此之外,您还可以附加过滤器集以模拟过滤器或结果集,以确定重叠的结果。
TwinCAT数控轴的配置注意事项
如果要用TwinCAT数控轴进行波德图记录,则必须在轴参数设置中设置匹配速度标准化f。
根据AX5000的内部变速计算(1个增量对应5.588 x 10-5 rpm),计算公式如下:
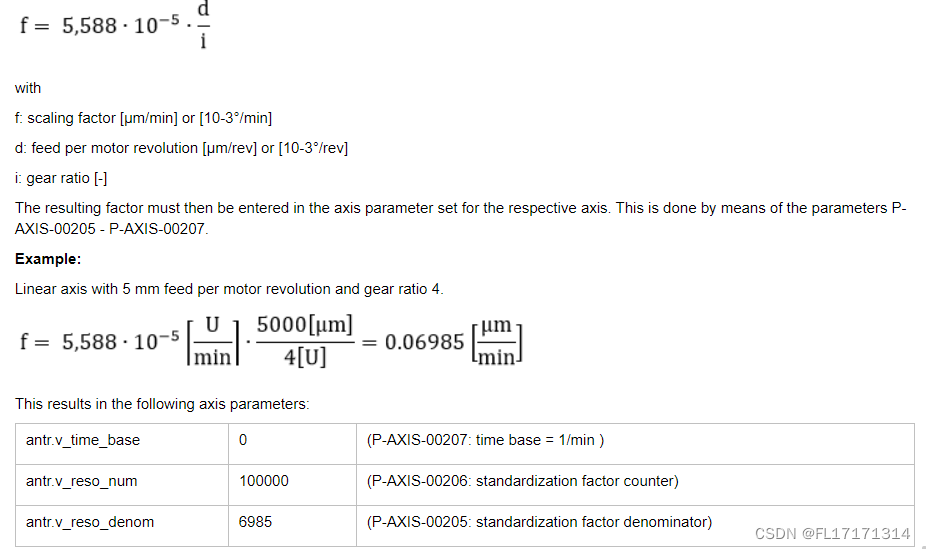
关于轴参数的进一步信息可以在Beckhoff信息系统中找到文件“TwinCAT CNC”。(TwinCAT 2比;TwinCAT数控 TwinCAT数控 TwinCAT数控轴参数
最后
以上就是闪闪眼睛最近收集整理的关于Twincat Bode Plot 使用经验总结的全部内容,更多相关Twincat内容请搜索靠谱客的其他文章。


![[动态系统的建模与分析]15_伯德图,bode图,为什么是20logM?分贝又是什么?](https://www.shuijiaxian.com/files_image/reation/bcimg16.png)





发表评论 取消回复