又到了大学春季学期,自控原理如期而至;还记得一年前我在学自控的时候,得到一位恩师的指导和解惑,问了老师太多自控原理的问题还去蹭现代控制理论,恩师都耐心解答,先在这里感谢恩师对我自控原理的指导和大学学习的“启蒙“。今天学直流电机运动控制的时候,回过头又翻看奈氏判据(幅相曲线和波德图判稳),再次感叹奈奎斯特判据的优美巧妙,并写下一些理解心得(没有很详细的每一步,只有难点的分析,故建议学到频域分析的时候再看帮助理解),希望对后面的同学有所帮助。
一、幅角原理
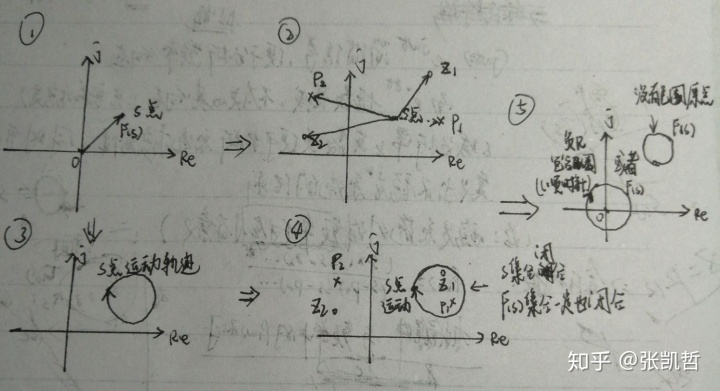
由自控原理教材(胡寿松版),奈奎斯特判稳的第一节是判据的数学基础——幅角原理;讲的是:复平面的一个复变函数F (s)=(s-z1)*(s-z2)/(s-p1)*(s-p2)(可以是任意的复变函数,这里用它方便讨论) ,然后它的自变量s进行顺时针运动,顺时针运动的轨迹是一个闭合轨迹(可以是圆或者任何闭合曲线)Γ曲线,且s运动的时候不能经过他的零极点(z1,z2和p1,p2),这个闭合轨迹包围的零极点个数P、Z和F(s) 绕坐标原点的圈数R有关,具体关系如下:R=P-Z。很抽象,请看下面的通俗分析:
首先,任意一点s,它的F(s)的相角为 ∠F(S)=∠(s-z1) +∠(s-z2) -∠(s-p1) -∠(s-p2),注意,∠F(S)对应的角度是对原点的夹角且我们这里不考虑长度(幅值),只考虑相角。
然后,如果这个任意一点s它运动起来,顺时针运动形成一个闭合曲线Γ,那么这个曲线如果包围了零点z1和极点p1,那么由复平面向量的相角定义,逆时针为正,顺时针为负,围绕闭合曲线Γ一周的角度为∫∠(s-z1)=∫∠(s-p1)=-2π;而没有被包围的零点z2和极点p2所对应的角度∫∠(s-z2)=∫∠(s-p2)=0。因此F(s)绕原点的圈数就与闭合曲线Γ包围零极点数有直接关系R=P-Z。(逆时针为正圈数,顺时针为负圈数)
二、复变函数F(s)和闭合曲线Γ的选择和频域转换
终于把第一步难关攻克,我们接下来看第二个问题,我们有了幅角原理,得到了F(s)绕原点的圈数就与闭合曲线Γ包围零极点数有直接关系R=P-Z,我们用它来做什么呢?
(1)构造需要的复变函数F(s)
令 F(s)=1+G(s)H(s)=1+B(s)/A(s)=[A(s)+B(s)]/A(s),那么F(s)的极点为A(s),也是开环传函的极点;F(s)的零点为A(s)+B(s),是闭环传函的极点。不得不说,F(s)是非常巧妙的构造,F(s)联系开环传函和闭环传函;同时它的零点就是闭环传函的极点,正是我们判稳所需要的,即F(s)没有在s坐标实部大于0的极点,系统就是稳定的!
现在我们只知道开环传函G(s)H(s),同时我们知道由教材不难理解F(s)绕原点的圈数就等价于开环传函绕(-1,0)的圈数。那么我们就可以用开环传函画圈,它绕(-1,0)的圈数就是F(s)绕原点的圈数——那我们就知道了R=P-Z中的R。由于开环传函已知,那么F(s)的极点就是开环传函的极点,它的位置我们也可以在s坐标具体确定,那么画出能确定R和P的闭合曲线Γ,我们也就能求出F(s)的Z=P-R,也就是被闭合曲线Γ包围的Z的个数。
(2)那么剩下的问题就是闭合曲线Γ到底怎么画呢?
第一步,想清楚我们是要干什么——判定稳定性,也就是Z(闭环极点数)在s坐标虚轴的右半平面个数为0。有了这个目标,那我们就知道要使闭合曲线Γ包围了整个虚轴右半平面,怎么用数学方法表达——s的实部从0到正无穷大,s的虚部从负无穷到正无穷;
第二步,闭合曲线Γ我们找好了,那么随之我们定下了P(开环极点被闭合曲线Γ包围的个数)。然后我们想知道R是多少?
第三步,我们如何通过确定了闭合曲线Γ,然后确定R【开环传函包围(-1,0)的圈数】呢?这是最美妙的一步,当我想通这一步的时候,我被奈奎斯特大师深深折服了!我们都知道,频域中的开环幅相曲线容易画,即jw从0到正无穷大(负无穷到0相当于对称的另一半);而在s域,你却很难画出F(s)【或开环传函G(s)H(s)】在上述的闭合曲线Γ映射下的曲线到底包围原点【或(-1,0)点】多少圈。怎么办?前面的步骤都要前功尽弃了?当然不会,奈奎斯特大师给了我们答案——既然幅相曲线容易画出,那么我们能不能将s域转化为频域,忽略掉实部,我们就可以用幅相曲线得到R的值。我们知道一般情况下,开环传函的分子阶次都是小于分母的阶次,即s趋于无穷大时,开环传函的幅值是等于0的,也就是都收敛到了原点;而无穷大虚轴右半平面闭合曲线Γ又和虚轴有两个交点,故这个半圆闭合曲线Γ就可以等价到虚轴上(jw从负无穷到正无穷)。太妙了,s域就这么和频域jw等价了!
下面是我当时问我恩师同样的问题:
第四步,闭合曲线Γ已经等价到了整个虚轴,剩下就是用开环传函画幅相曲线,由于幅相曲线是jw从0到正无穷,即只含了一半的闭合曲线Γ。但是另一半是和实轴对称的,故求出的是与(-1,0)的半包围圈数,再乘2得到需要的R值。如果遇到积分环节或震荡环节,虚轴上会有开环极点,必须绕开,剩下具体的求法和注意点自控原理教材讲得很详细,我就不再赘述了。
三、奈奎斯特判据的应用
能坚持看到这里的电气控制系同学,很谢谢你们的耐心和信任!由于教材有频域分析的具体应用和设计,最后我只谈下自控原理频域分析和复频域分析的理解:
(1)复频域分析以根轨迹为主,同样是利用开环传递函数,根轨迹是研究根轨迹开环增益的变化导致闭环极点的走向。分析方便直观,清晰的说明了系统的稳态性能,但是对系统的动态性能设计却不是很好使。
(2)频域分析法的好处就比较多了,我个人认为频率是系统系统动态性能最直观的表达,可以通过波德图和幅相曲线判定稳定性和动态性能设计;而s域中加入衰减系数的实部,是一个指数衰减过程,它只起到判定稳定性(数学上就是收敛)的作用。当然,稳定性是系统的第一要求,如果没有稳定性,也就没有了频率响应和动态性能。
(3)时域是我们用来验证系统在频域中设计的好坏的,因为用它分析计算复杂,所以不用来设计。
(4)上述的判据都是基于经典控制理论的,即主要考虑的是系统的外特性,也就是分析输出响应,并没有解决系统内部变量的关系。在较低阶次或内部变量不多的对象中(如直流电机)还可以用波德图等频域分析设计,而面对内部变量较复杂的对象中(交流电机等)则需要用现代控制理论进行分析,学校一般会安排自控原理和现代控制一起上的。具体的分析我现在也在学,以后有机会继续交流。
(5)最后,控制理论不没有涉及到具体的对象,故有疑惑是正常的。但是系统传递函数结构清晰明了,方便我们打下理论基础,预祝每个同学都能学好自控原理!
最后
以上就是多情手套最近收集整理的关于稳定判据_奈奎斯特稳定判据的简明通俗理解和应用的全部内容,更多相关稳定判据_奈奎斯特稳定判据内容请搜索靠谱客的其他文章。








发表评论 取消回复