在带滤波器的PID控制仿真-2的基础上对算例进行Simulink仿真。
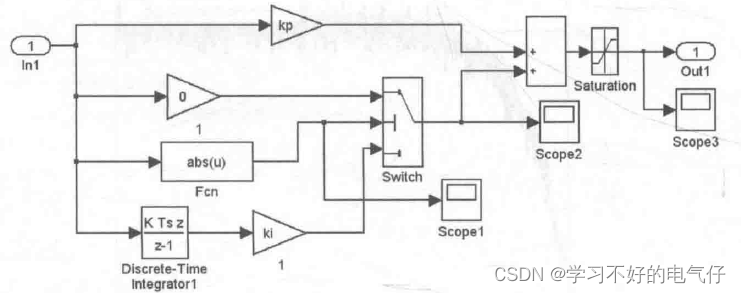
控制器采用积分分离PI控制,即当误差的绝对值小于等于0.80时,加入积分控制,仿真结果如图1和2所示。
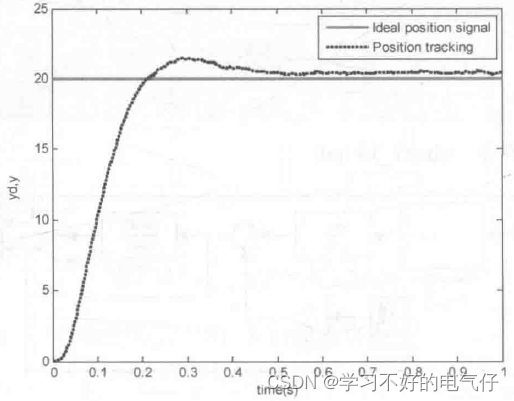
图1 加入滤波器时PID控制阶跃响应
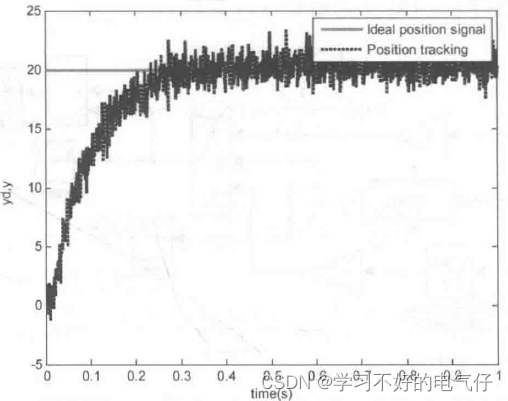
图2 无滤波器时PID控制阶跃响应
初始化程序:chap1_19int.m
clear all;
close all;
ts=0.001; %Low Filter
Q=tf([ 11.[0.04,1]);
Qz=c2d(Q,ts,'tustin');
[numQ,denQ]=tfdata(Qz,'V);
%Plant
sys=tf(5.235e005,[1,87.35,1.047e004,0]);
dsys=c2d(sys,ts,'z');
[num,den]=tfdata(dsys,'v');
kp=0.20;
ki=0.05;
仿真图:
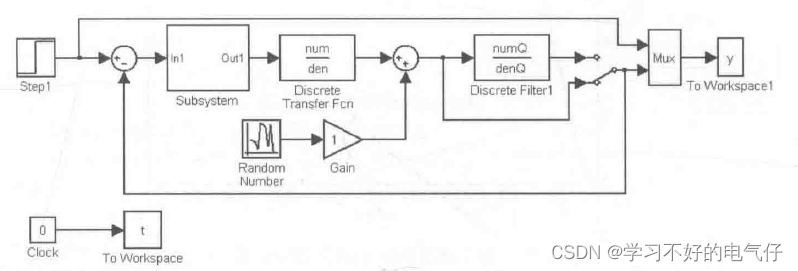
PI控制仿真图
作图程序:chap1_19plot.m
close all;
plot(t,y(:,1),r,ty(:.2).'k:'.'linewidth ,2);xlabel('time(s)');ylabel(yd,y');
legend('TIdeal position signal','Position tracking')
最后
以上就是腼腆未来最近收集整理的关于带滤波器的PID控制仿真-3(Simulink仿真)的全部内容,更多相关带滤波器内容请搜索靠谱客的其他文章。
本图文内容来源于网友提供,作为学习参考使用,或来自网络收集整理,版权属于原作者所有。








发表评论 取消回复